In-Depth Analysis of Automotive Electronic and Electrical Architecture
Smart driving and intelligent cockpits are experiences that consumers can perceive, supported by powerful sensors and chips, as well as advanced electronic and electrical architectures. The electronic and electrical architecture determines the upper limit of the intelligent functions. Without advanced electronic and electrical architecture, no matter how many superficial intelligent functions are equipped, it cannot support the continuous updates and sustained leading of the vehicle, nor can it lead to cost reductions and high efficiency in production and research and development.The current automotive electronic and electrical architecture is transitioning from distributed to centralized computing. This process is akin to moving from feudal fragmentation to a unified empire. Initially, due to multiple historical burdens, control was concentrated in several power centers, and there still exist several local authorities. However, it will ultimately reach a centralized authority, where local areas are only responsible for executing unified orders. Accompanying the integration of electronic architecture is the decoupling of software layers, akin to a government organization having a central government, provincial, and county levels, where changes at one level do not affect the others, allowing for iterative development. At the same time, the communication architecture of vehicles is also being upgraded, similar to constructing a nationwide highway network.Tesla initiated a comprehensive transformation of the electronic and electrical architecture with the Model 3, and other automakers are also in a rapid iteration phase of their architectures. Overall, domestic brands are iterating quickly, developing multiple generations of architectures simultaneously. This process is accompanied by high R&D investments, expansion of software talent, organizational transformations in R&D, and restructuring of supplier relationships. Automakers are transitioning from hardware integrators to software integrators. The process of extracting software from the black box of past suppliers and integrating it into their own operations is new and complex. After several iterations, the shift of electronic and electrical architecture to centralized computing is inevitable. In the future, software ownership will return to the OEMs, significantly broadening the profit pool for automakers.
1. Centralized Electronic and Electrical Architecture is the Premise for Software-Defined Vehicles
The Automotive Electronic and Electrical Architecture (EEA) integrates various sensors, Electronic Control Units (ECUs), wiring harness topologies, and electronic and electrical distribution systems in vehicles to perform calculations, power distribution, and energy allocation, thereby realizing various functions of the vehicle.If we compare a car to a human body, the mechanical structure of the car is equivalent to human bones, the power and steering are like human limbs, while the electronic and electrical architecture is akin to the nervous system and brain of a human, which is key to enabling information interaction and complex operations in vehicles. The electronic and electrical architecture encompasses the hardware and software of onboard computing and control systems, sensors, communication networks, and electrical distribution systems. It combines various subsystems in an orderly manner through specific logic and standards to form an organic whole that realizes complex functions. In the era of functional vehicles, once a vehicle is produced, the user experience is essentially fixed; in the era of intelligent vehicles, cars are continuously updated and personalized. The evolution of the electronic and electrical architecture towards centralization is a prerequisite for this transformation. With the development of chips and communication technology, the electronic and electrical architecture is undergoing significant changes.
1.1 Distributed Electronic and Electrical Architecture is Overburdened
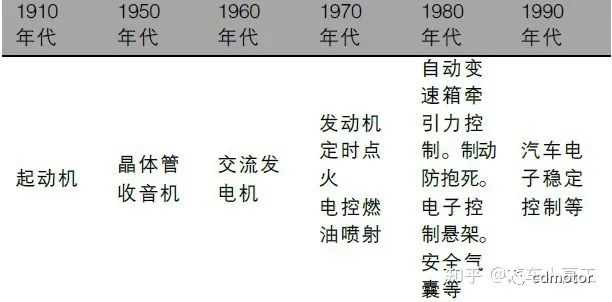
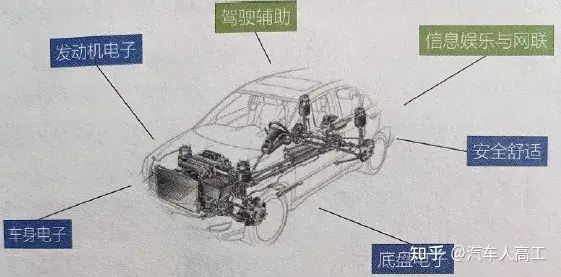
When cars were first invented, they were purely mechanical products with no batteries and no need for electrical power. In 1927, Bosch developed the lead-acid battery, providing a reliable power source for electronic devices in vehicles. The development of large-scale integrated circuits has allowed automotive electronics to advance rapidly. Engine timing control systems, electronic fuel injection systems, automatic transmission control systems, traction control systems, electronic suspension systems, electronic seats, electronic windows, dashboards, electronic stability control systems, and more have gradually become indispensable components of vehicles. The growth of automotive electronic control technology has provided consumers with higher performance, more comfort, and safer transportation.Development History of Automotive ElectronicsUnder the early distributed electronic and electrical architecture, each ECU typically only controlled a single functional unit, operating independently to control components like the engine, brakes, and doors. Common examples include the Engine Control Module (ECM), Transmission Control Module (TCM), Brake Control Module (BCM), and Battery Management System (BMS). These ECUs are connected via CAN (Controller Area Network) or LIN (Local Interconnect Network) bus, exchanging information through vendor-defined communication protocols.Classification of Automotive Electronics ApplicationsAs the application of electronic and electrical products in vehicles increases, the number of ECUs has rapidly increased from dozens to over 100. With more ECUs, the total length of wiring harnesses inevitably increases, resulting in greater weight (the bus length of the Audi Q7 and Porsche Cayenne, launched in 2007, exceeds 6 km, with a total weight exceeding 70 kg, making it the second heaviest component in the vehicle after the engine). This leads to increased overall vehicle costs and a lower level of automation in vehicle assembly.Distributed computing has led to information silos within vehicles, wasted computing power, and deep coupling of hardware and software, with OEMs heavily reliant on suppliers.In the traditional automotive supply chain, different ECUs come from different suppliers, and different hardware has different embedded software and underlying code. The software for the entire vehicle is essentially a mixture of many independent, incompatible software systems, resulting in a lack of compatibility and scalability for the entire system. Any functional changes that the automaker wants to implement require negotiations with multiple suppliers for hardware and software coordination, and each new feature necessitates adding a new ECU and communication system, which is time-consuming and cumbersome. Furthermore, since each ECU is bound to a specific function, it cannot achieve complex functions that span multiple ECU sensors, nor can it maintain continuous updates of vehicle software via OTA (Over the Air).Distributed electronic and electrical architecture leads to communication bandwidth bottlenecks.As the functionalities of smart connected vehicles become increasingly complex and the number of vehicle sensors increases, the real-time requirements for data transmission and processing also rise, leading to an exponential growth in the volume of communication data within the vehicle’s network. Traditional FlexRay, LIN, and CAN low-speed buses can no longer provide high-bandwidth communication capabilities or meet the real-time requirements for data transmission and processing.Problems and Bottlenecks Facing Automotive Distributed ArchitectureLet’s illustrate the drawbacks of distributed electronic and electrical architecture with a specific example:Suppose an automaker needs to modify the functionality of a windshield wiper assembly. Since each vehicle must define, calibrate, and validate the wiper assembly at predetermined nodes during the development process, subsequent modifications equate to secondary development, requiring the automaker to renegotiate contracts with the wiper supplier and redo calibrations and validations at various levels. Clearly, such a hardware-oriented engineering system and process cannot support rapid iterative evolution of products in an increasingly complex automotive future.The solution is to standardize hardware. The wiper assembly is a motor-driven mechanical component, and the sensors needed for the wipers can utilize cameras or other sensors installed in the vehicle. Once the transparency of the windshield is detected to decrease, the vehicle can automatically control the wipers to start the appropriate working mode through software, achieving the goal of a software-defined wiper function. Once various components and modules are standardized, higher levels of intelligence can be realized through software in the central controller, similar to multiple apps running on a smartphone. This can significantly shorten product development cycles and widely adopt standardized parts, helping companies control costs and quality. For instance, a parts manufacturer developing and producing a standardized wiper can sell it to all automakers at a very low price; at the same time, the calibration and validation of standardized hardware can be simplified, further saving development time and costs.
1.2 Automotive Electronic and Electrical Architecture is Moving Towards Centralized Computing
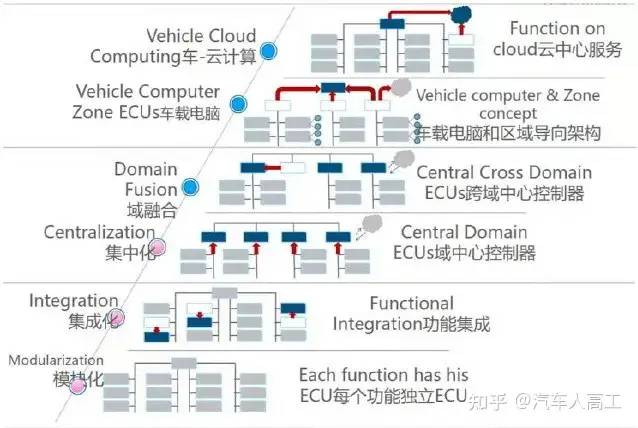
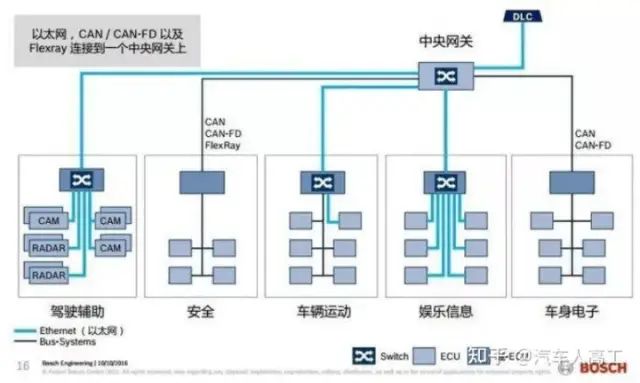
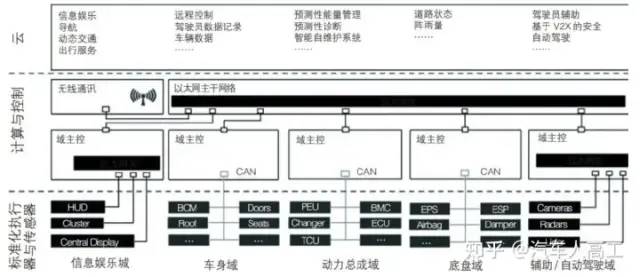
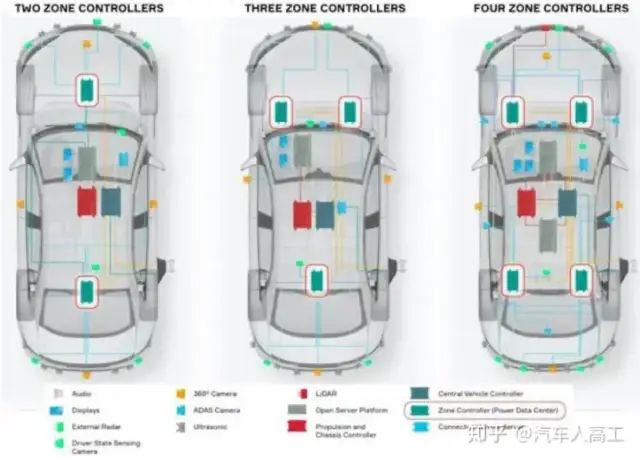
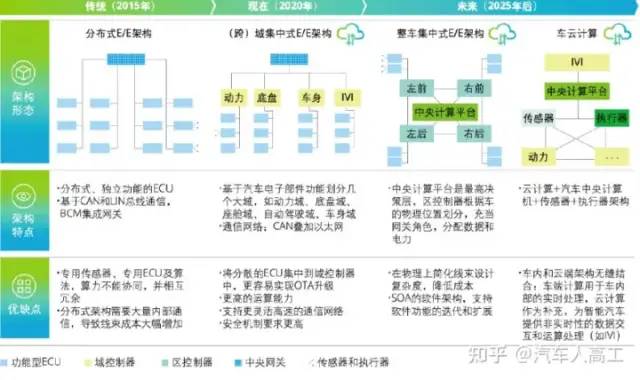
The distributed electronic and electrical architecture of vehicles can no longer adapt to the further evolution of automotive intelligence. High integration is the solution.. By building the vehicle’s “brain” on a few high-performance processors, a new type of electronic and electrical architecture is formed, creating a “nervous network” and “blood vessels” for rapid information transfer to control and drive all electronic components and sensors.A few high-performance computing units replace the previously numerous distributed MCUs (Microcontroller Units), and multiple small sensors are integrated into a more powerful single sensor. The functions of the vehicle are gradually integrated and centralized. Reducing the burden of ECUs means separating the hardware and software of the dozens or hundreds of ECUs originally installed in the vehicle and migrating the functions primarily through software to domain controllers (which consist of the main control hardware, operating systems, algorithms, and application software). Functions such as autonomous driving, entertainment, and gateways are integrated based on the domain controller architecture, moving further to the cross-domain integration stage, and eventually to the centralized computing domain stage. Huawei predicts that by 2030, electronic and electrical architecture will evolve into a centralized computing platform with high-bandwidth vehicle communication architecture.The upgrades of automotive electronic and electrical architecture mainly reflect inhardware architecture, software architecture, and communication architecture: Hardware architecture is developing from distributed to domain control/centralized direction, software architecture is evolving from high coupling of hardware and software to layered decoupling, and communication architecture is transitioning from LIN/CAN bus to Ethernet.Characteristics of Each Stage of EEA EvolutionBosch has outlined a roadmap for electronic and electrical architecture divided into six stages, which has become an industry consensus: distributed stage (including modularization and integration), domain centralized (including centralization and domain fusion), and centralized (including vehicle computer and vehicle cloud computing).Bosch’s Classification of the Evolution of Automotive Electronic and Electrical Architecture into Six StagesModularization Stage1) An ECU is responsible for a specific function, such as a controller for the vehicle’s lighting, another for the doors, and another for the keyless system. As the number of functions in vehicles increases, this architecture becomes increasingly complex and unsustainable.2) In the integration stage, a single ECU is responsible for multiple functions, reducing the number of ECUs compared to the previous stage. In these two stages, the automotive electronic and electrical architecture remains in the distributed stage, with a low degree of integration of ECU functions.Functional Domain Control StageThe functional domain refers to domain controllers divided based on functions, the most common being the five functional domains defined by Bosch (power domain, chassis domain, body domain, cockpit domain, and autonomous driving domain). Domain controllers are connected via Ethernet and CANFD (CAN with Flexible Data Rate), with the cockpit and autonomous driving domains requiring progressively greater computing power due to the need to process large amounts of data. The powertrain domain, chassis domain, and body domain mainly involve control instruction calculations and communication resources, with lower computing power requirements.Cross-Domain Integration StageBased on functional domains, further cost reductions and enhanced collaboration have led to cross-domain integration, which merges multiple domains into one, controlled by a cross-domain control unit. For example, merging the power domain, chassis domain, and body domain into a complete vehicle control domain transitions from five functional domains (autonomous driving domain, power domain, chassis domain, cockpit domain, and body domain) to three functional domains (autonomous driving domain, intelligent cockpit domain, vehicle control domain).Bosch’s Defined Functional DomainsElectronic and Electrical Architecture Developed by United ElectronicsCentralized Computing Domain StageWith the deep integration of functional domains, functional domains gradually upgrade to more general computing platforms, transitioning from functional domains to location domains (such as mid-domain, left-domain, right-domain). The Zonal Control Unit (ZCU) is a localized perception, data processing, control, and execution unit within the vehicle’s computing system. It connects sensors, actuators, and ECUs within a specific area of the vehicle and is responsible for the preliminary calculation and processing of sensor data in that area, as well as converting network protocols within that region. The location domain allows for nearby wiring harness arrangements, reducing costs, minimizing communication interfaces, and facilitating automated assembly of wiring harnesses, thereby improving efficiency. Sensors, actuators, etc., can be accessed nearby through the regional control unit, making hardware expansion easier, and the structural management of regional controllers becomes simpler. Regional access to centralized computing ensures the stability of the entire vehicle architecture and the scalability of functions, allowing new external components to connect via regional gateways, while the pluggable design of hardware supports continuous enhancements in computing power, providing sufficient computing power for iterative upgrades of application software on the centralized computing platform.In a study conducted on a certain automaker, Aptiv found that using regional controllers could integrate 9 ECUs and reduce the number of individual wires by hundreds, resulting in a weight reduction of 8.5 kg for the vehicle. This weight reduction helps save energy and extends the range of electric vehicles. Additionally, since regional controllers divide the basic electrical structure of the vehicle into more manageable components, automated wiring harness assembly becomes easier.Huawei’s Computing and Communication ArchitectureCentralized Computing and Regional Controller ArchitectureAutomotive Cloud Computing StageTransferring some vehicle functions to the cloud further simplifies the in-vehicle architecture. Various sensors and actuators in the vehicle can be defined and controlled by software, and automotive components gradually become standardized parts, fully realizing the software-defined vehicle functionalities.Characteristics of Each Stage of Automotive Electronic and Electrical ArchitectureThe evolution of automotive electronic and electrical architecture provides strong support for the decoupling of hardware and software, with highly centralized electronic and electrical architecture bringing about computing centralization, software and hardware decoupling, platform standardization, and functional customization.1) Computing power tends to be centralized, with numerous ECUs concentrated into a few powerful computing platforms, providing a computational foundation for software operation;2) Underlying software and code begin to integrate, establishing a software ecosystem centered around the operating system, enabling continuous iteration of software, accelerating the development of OTA;3) Domain controllers combined with time-sensitive Ethernet can achieve high-speed processing and transmission of data, creating conditions for the development of software applications.Centralized Electronic and Electrical Architecture is the Cornerstone of Software-Defined Vehicles
Welcome to all angel round and Series A companies in the entire automotive industry chain (including the electrification industry chain) to join the group (Friendly connections include 700 automotive investment institutions including top-tier organizations; a selection of quality projects will be presented to existing institutions by theme));There are communication groups for leaders of innovative technology companies , dozens of groups covering the entire automotive industry, including complete vehicles, automotive semiconductors, key components, new energy vehicles, smart connected vehicles, aftermarket, automotive investment, autonomous driving, and vehicle networking. To join the group, please scan the administrator’s WeChat (please indicate your company name).

 Characteristics of Each Stage of EEA Evolution
Characteristics of Each Stage of EEA Evolution