
Click the blue text
Follow us
Author | woshigaowei5146 @CSDN
Editor | 3D Vision Developer Community
Table of Contents
Preparation
Configuration
Testing
Program
Color Recognition Tracking
Face Recognition
Gesture Recognition
Shape Recognition
Barcode Recognition
QR Code Recognition
Troubleshooting
Preparation
-
Raspberry Pi 4B
-
USB Plug-and-Play Camera
Configuration
Install python-opencv, reference: https://blog.csdn.net/weixin_45911959/article/details/122709090
Install numpy, pip3 install -U numpy
Install opencv-python, opencv-contrib-python, reference: https://blog.csdn.net/weixin_57605235/article/details/121512923
Testing
Image:
import cv2
a = cv2.imread("/home/pi/2020-06-15-162551_1920x1080_scrot.png")
cv2.imshow("test", a)
cv2.waitKey()
cv2.destroyAllWindows()Video:
import cv2
cap = cv2.VideoCapture(0)
while True:
ret, frame = cap.read()
cv2.imshow('frame', frame) # This step is necessary, otherwise the image will not display
if cv2.waitKey(1) & 0xFF == ord('q'):
break
# When everything is done, release the capture
cap.release()
cv2.destroyAllWindows()Program
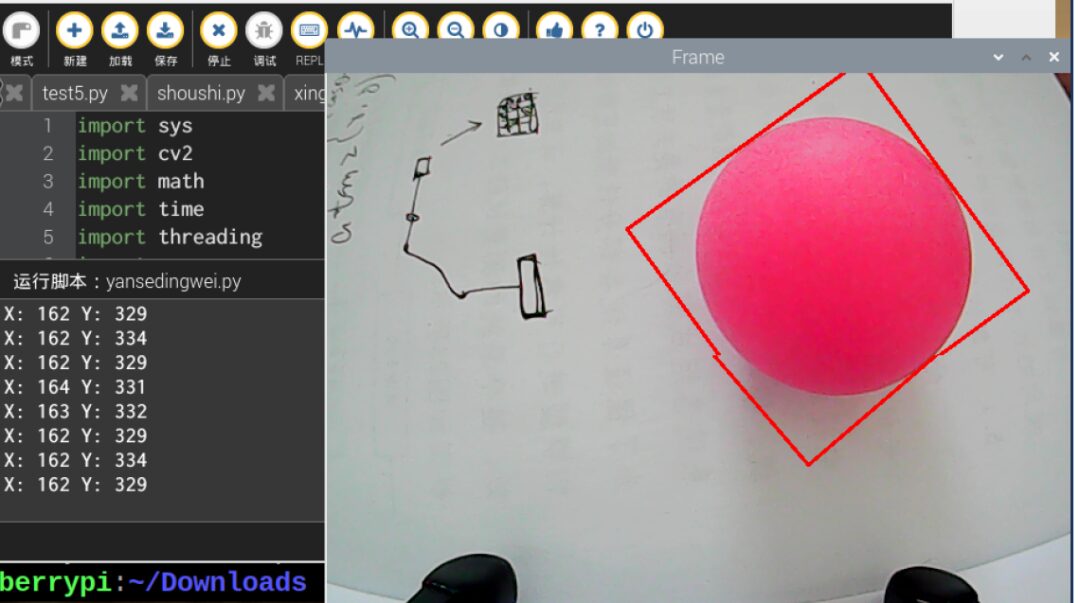
Color Recognition Tracking
import sys
import cv2
import math
import time
import threading
import numpy as np
import HiwonderSDK.yaml_handle as yaml_handle
if sys.version_info.major == 2:
print('Please run this program with python3!')
sys.exit(0)
range_rgb = {
'red': (0, 0, 255),
'blue': (255, 0, 0),
'green': (0, 255, 0),
'black': (0, 0, 0),
'white': (255, 255, 255)
}
__target_color = ('red', 'green', 'blue')
lab_data = yaml_handle.get_yaml_data(yaml_handle.lab_file_path) # Find the largest contour
# Function to find the largest contour based on area
def getAreaMaxContour(contours):
contour_area_temp = 0
contour_area_max = 0
area_max_contour = None
for c in contours: # Iterate through all contours
contour_area_temp = math.fabs(cv2.contourArea(c)) # Calculate contour area
if contour_area_temp > contour_area_max:
contour_area_max = contour_area_temp
if contour_area_temp > 300: # Only valid if area is greater than 300, to filter interference
area_max_contour = c
return area_max_contour, contour_area_max # Return the largest contour
detect_color = None
color_list = []
start_pick_up = False
size = (640, 480)
def run(img):
global rect
global detect_color
global start_pick_up
global color_list
img_copy = img.copy()
frame_resize = cv2.resize(img_copy, size, interpolation=cv2.INTER_NEAREST)
frame_gb = cv2.GaussianBlur(frame_resize, (3, 3), 3)
frame_lab = cv2.cvtColor(frame_gb, cv2.COLOR_BGR2LAB) # Convert image to LAB space
color_area_max = None
max_area = 0
areaMaxContour_max = 0
if not start_pick_up:
for i in lab_data:
if i in __target_color:
frame_mask = cv2.inRange(frame_lab,
(lab_data[i]['min'][0],
lab_data[i]['min'][1],
lab_data[i]['min'][2]),
(lab_data[i]['max'][0],
lab_data[i]['max'][1],
lab_data[i]['max'][2])) # Perform bitwise operation on original image and mask
opened = cv2.morphologyEx(frame_mask, cv2.MORPH_OPEN, np.ones((3, 3), np.uint8)) # Opening operation
closed = cv2.morphologyEx(opened, cv2.MORPH_CLOSE, np.ones((3, 3), np.uint8)) # Closing operation
contours = cv2.findContours(closed, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)[-2] # Find contours
areaMaxContour, area_max = getAreaMaxContour(contours) # Find maximum contour
if areaMaxContour is not None:
if area_max > max_area: # Find maximum area
max_area = area_max
color_area_max = i
areaMaxContour_max = areaMaxContour
if max_area > 500: # Found maximum area
rect = cv2.minAreaRect(areaMaxContour_max)
box = np.int0(cv2.boxPoints(rect))
y = int((box[1][0]-box[0][0])/2+box[0][0])
x = int((box[2][1]-box[0][1])/2+box[0][1])
print('X:', x, 'Y:', y) # Print coordinates
cv2.drawContours(img, [box], -1, range_rgb[color_area_max], 2)
if not start_pick_up:
if color_area_max == 'red': # Red is the largest
color = 1
elif color_area_max == 'green': # Green is the largest
color = 2
elif color_area_max == 'blue': # Blue is the largest
color = 3
else:
color = 0
color_list.append(color)
if len(color_list) == 3: # Multiple judgments
# Take the average
color = int(round(np.mean(np.array(color_list))))
color_list = []
if color == 1:
detect_color = 'red'
elif color == 2:
detect_color = 'green'
elif color == 3:
detect_color = 'blue'
else:
detect_color = 'None'
return img
if __name__ == '__main__':
cap = cv2.VideoCapture(-1) # Read camera
__target_color = ('red',)
while True:
ret, img = cap.read()
if ret:
frame = img.copy()
Frame = run(frame)
cv2.imshow('Frame', Frame)
key = cv2.waitKey(1)
if key == 27:
break
else:
time.sleep(0.01)
cv2.destroyAllWindows()Effect:
Face Recognition
Utilizes a face dataset trained with Caffe.
import sys
import numpy as np
import cv2
import math
import time
import threading
# Face Detection
if sys.version_info.major == 2:
print('Please run this program with python3!')
sys.exit(0)
# Threshold
conf_threshold = 0.6
# Model Location
modelFile = "/home/pi/mu_code/models/res10_300x300_ssd_iter_140000_fp16.caffemodel"
configFile = "/home/pi/mu_code/models/deploy.prototxt"
net = cv2.dnn.readNetFromCaffe(configFile, modelFile)
frame_pass = True
x1 = x2 = y1 = y2 = 0
old_time = 0
def run(img):
global old_time
global frame_pass
global x1, x2, y1, y2
if not frame_pass:
frame_pass = True
cv2.rectangle(img, (x1, y1), (x2, y2), (0, 255, 0), 2, 8)
x1 = x2 = y1 = y2 = 0
return img
else:
frame_pass = False
img_copy = img.copy()
img_h, img_w = img.shape[:2]
blob = cv2.dnn.blobFromImage(img_copy, 1, (100, 100), [104, 117, 123], False, False)
net.setInput(blob)
detections = net.forward() # Calculate recognition
for i in range(detections.shape[2]):
confidence = detections[0, 0, i, 2]
if confidence > conf_threshold:
# Convert coordinates of recognized face back to original scale
x1 = int(detections[0, 0, i, 3] * img_w)
y1 = int(detections[0, 0, i, 4] * img_h)
x2 = int(detections[0, 0, i, 5] * img_w)
y2 = int(detections[0, 0, i, 6] * img_h)
cv2.rectangle(img, (x1, y1), (x2, y2), (0, 255, 0), 2, 8) # Draw rectangle around detected face
X = (x1 + x2) / 2
Y = (y1 + y2) / 2
print('X:', X, 'Y:', Y)
return img
if __name__ == '__main__':
cap = cv2.VideoCapture(-1) # Read camera
while True:
ret, img = cap.read()
if ret:
frame = img.copy()
Frame = run(frame)
cv2.imshow('Frame', Frame)
key = cv2.waitKey(1)
if key == 27:
break
else:
time.sleep(0.01)
cv2.destroyAllWindows()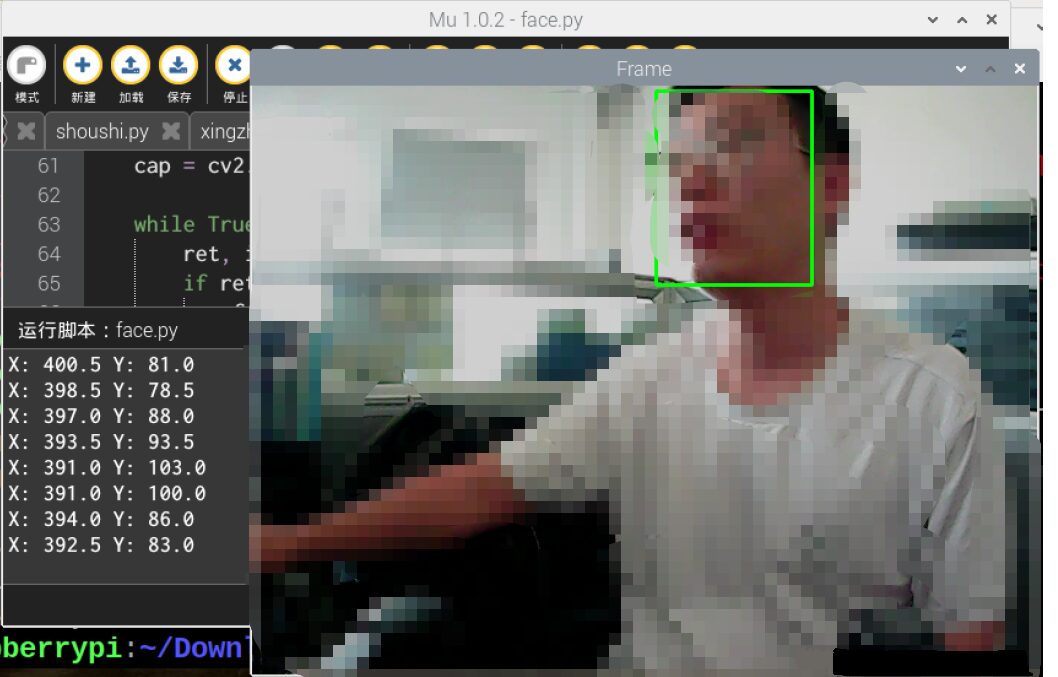
Gesture Recognition
import os
import sys
import cv2
import math
import time
import numpy as np
import HiwonderSDK.Misc as Misc
if sys.version_info.major == 2:
print('Please run this program with python3!')
sys.exit(0)
__finger = 0
__t1 = 0
__step = 0
__count = 0
__get_finger = False
# Initial Position
def initMove():
pass
def reset():
global __finger, __t1, __step, __count, __get_finger
__finger = 0
__t1 = 0
__step = 0
__count = 0
__get_finger = False
def init():
reset()
initMove()
class Point(object): # A coordinate point
x = 0
y = 0
def __init__(self, x=0, y=0):
self.x = x
self.y = y
class Line(object): # A line
def __init__(self, p1, p2):
self.p1 = p1
self.p2 = p2
def GetCrossAngle(l1, l2):
'''
Calculate the angle between two lines
:param l1:
:param l2:
:return:
'''
arr_0 = np.array([(l1.p2.x - l1.p1.x), (l1.p2.y - l1.p1.y)])
arr_1 = np.array([(l2.p2.x - l2.p1.x), (l2.p2.y - l2.p1.y)])
cos_value = (float(arr_0.dot(arr_1)) / (np.sqrt(arr_0.dot(arr_0))
* np.sqrt(arr_1.dot(arr_1)))) # Note: convert to float for calculation
return np.arccos(cos_value) * (180 / np.pi)
def distance(start, end):
"""
Calculate the distance between two points
:param start: Start point
:param end: End point
:return: Distance between the two points
"""
s_x, s_y = start
e_x, e_y = end
x = s_x - e_x
y = s_y - e_y
return math.sqrt((x ** 2) + (y ** 2))
def image_process(image, rw, rh): # hsv
'''
# Light influence, please modify the range of cb
# The Cr component of normal yellow people is about 140~160
Recognize skin color
:param image: Image
:return: Binary image after recognition
'''
frame_resize = cv2.resize(image, (rw, rh), interpolation=cv2.INTER_CUBIC)
YUV = cv2.cvtColor(frame_resize, cv2.COLOR_BGR2YCR_CB) # Convert image to YCrCb
_, Cr, _ = cv2.split(YUV) # Split YCrCb
Cr = cv2.GaussianBlur(Cr, (5, 5), 0)
_, Cr = cv2.threshold(Cr, 135, 160, cv2.THRESH_BINARY +
cv2.THRESH_OTSU) # OTSU Binarization
# Opening operation, remove noise
open_element = cv2.getStructuringElement(cv2.MORPH_RECT, (5, 5))
opend = cv2.morphologyEx(Cr, cv2.MORPH_OPEN, open_element)
# Erosion
kernel = np.ones((3, 3), np.uint8)
erosion = cv2.erode(opend, kernel, iterations=3)
return erosion
def get_defects_far(defects, contours, img):
'''
Get the farthest point in the convex hull
'''
if defects is None and contours is None:
return None
far_list = []
for i in range(defects.shape[0]):
s, e, f, d = defects[i, 0]
start = tuple(contours[s][0])
end = tuple(contours[e][0])
far = tuple(contours[f][0])
# Calculate distance between two points
a = distance(start, end)
b = distance(start, far)
c = distance(end, far)
# Calculate angle between fingers
angle = math.acos((b ** 2 + c ** 2 - a ** 2) /
(2 * b * c)) * 180 / math.pi
# The angle between fingers is generally not greater than 100 degrees
# Less than 90 degrees
if angle <= 75: # 90:
# cv.circle(img, far, 10, [0, 0, 255], 1)
far_list.append(far)
return far_list
def get_max_coutour(cou, max_area):
'''
Find the largest contour
Calculate based on area, find the maximum, and determine if it is less than the minimum area, if less, abandon
:param cou: Contours
:return: Return the largest contour
'''
max_coutours = 0
r_c = None
if len(cou) < 1:
return None
else:
for c in cou:
# Calculate area
temp_coutours = math.fabs(cv2.contourArea(c))
if temp_coutours > max_coutours:
max_coutours = temp_coutours
cc = c
# Determine the largest area in all contours
if max_coutours > max_area:
r_c = cc
return r_c
def find_contours(binary, max_area):
'''
CV_RETR_EXTERNAL - Only extract the outermost contours
CV_RETR_LIST - Extract all contours and place them in a list
CV_RETR_CCOMP - Extract all contours and organize them into a two-layer hierarchy: the top layer is the outer boundary of the connected domain, and the inner layer is the inner boundary of the hole.
CV_RETR_TREE - Extract all contours and reconstruct the entire hierarchy of nested contours
method Approximation method (for all nodes, not including using internal approximation CV_RETR_RUNS).
CV_CHAIN_CODE - Freeman chain code output contour. Other methods output polygon (vertex sequence).
CV_CHAIN_APPROX_NONE - Translate all points from chain code form to point sequence form
CV_CHAIN_APPROX_SIMPLE - Compress horizontal, vertical, and diagonal segments, that is, the function only retains the end pixel points;
CV_CHAIN_APPROX_TC89_L1,
CV_CHAIN_APPROX_TC89_KCOS - Apply the Teh-Chin chain approximation algorithm. CV_LINK_RUNS - Use a completely different contour extraction algorithm by connecting horizontal fragments of 1.
:param binary: Input binary image
:return: Return the largest contour
'''
# Find all contours
contours = cv2.findContours(
binary, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)[-2]
# Return the largest contour
return get_max_coutour(contours, max_area)
def get_hand_number(binary_image, contours, rw, rh, rgb_image):
'''
:param binary_image:
:param rgb_image:
:return:
'''
# 2. Find the position of the fingertips
# Find contours, return the largest contour
x = 0
y = 0
coord_list = []
new_hand_list = [] # Get the final fingertip coordinates
if contours is not None:
# Perimeter 0.035 Modify according to recognition situation, the better the recognition, the smaller
epsilon = 0.020 * cv2.arcLength(contours, True)
# Contour similarity
approx = cv2.approxPolyDP(contours, epsilon, True) # cv2.approxPolyDP()'s parameter 2 (epsilon) is a distance value, indicating how close the polygon's contour is to the actual contour, the smaller the value, the more accurate; parameter 3 indicates whether it is a closed curve
# cv2.polylines(rgb_image, [approx], True, (0, 255, 0), 1) # Draw polygon
if approx.shape[0] >= 3: # More than three points, the minimum polygon is a triangle, a triangle needs three points
approx_list = []
for j in range(approx.shape[0]): # Store all points of the polygon in a list
# cv2.circle(rgb_image, (approx[j][0][0], approx[j][0][1]), 5, [255, 0, 0], -1)
approx_list.append(approx[j][0])
approx_list.append(approx[0][0]) # Append the first point at the end
approx_list.append(approx[1][0]) # Append the second point at the end
for i in range(1, len(approx_list) - 1):
p1 = Point(approx_list[i - 1][0], approx_list[i - 1][1]) # Declare a point
p2 = Point(approx_list[i][0], approx_list[i][1])
p3 = Point(approx_list[i + 1][0], approx_list[i + 1][1])
line1 = Line(p1, p2) # Declare a line
line2 = Line(p2, p3)
angle = GetCrossAngle(line1, line2) # Get the angle between two lines
angle = 180 - angle
if angle < 42: # Calculate the angle at which the two lines intersect, and less than 37 degrees
# cv2.circle(rgb_image, tuple(approx_list[i]), 5, [255, 0, 0], -1)
coord_list.append(tuple(approx_list[i]))
##############################################################################
# Remove points between fingers
# 1. Get the farthest point in the convex hull
# cv2.drawContours(rgb_image, contours, -1, (255, 0, 0), 1)
try:
hull = cv2.convexHull(contours, returnPoints=False)
# Find convex hull defect points. The returned data is 【start point, end point, farthest point, approximate distance to the farthest point】
defects = cv2.convexityDefects(contours, hull)
# Return the coordinates between fingers
hand_coord = get_defects_far(defects, contours, rgb_image)
except:
return rgb_image, 0
# 2. Remove the farthest points from coord_list
alike_flag = False
if len(coord_list) > 0:
for l in range(len(coord_list)):
for k in range(len(hand_coord)):
if (-10 <= coord_list[l][0] - hand_coord[k][0] <= 10 and
-10 <= coord_list[l][1] - hand_coord[k][1] <= 10): # Compare X, Y axis, remove those that are close
alike_flag = True
break
if alike_flag is False:
new_hand_list.append(coord_list[l])
alike_flag = False
# Get the fingertip coordinates and display
for i in new_hand_list:
j = list(tuple(i))
j[0] = int(Misc.map(j[0], 0, rw, 0, 640))
j[1] = int(Misc.map(j[1], 0, rh, 0, 480))
cv2.circle(rgb_image, (j[0], j[1]), 20, [0, 255, 255], -1)
fingers = len(new_hand_list)
return rgb_image, fingers
def run(img, debug=False):
global __act_map, __get_finger
global __step, __count, __finger
binary = image_process(img, 320, 240)
contours = find_contours(binary, 3000)
img, finger = get_hand_number(binary, contours, 320, 240, img)
if not __get_finger:
if finger == __finger:
__count += 1
else:
__count = 0
__finger = finger
cv2.putText(img, "Finger(s):%d" % __finger, (50, 480 - 30),
cv2.FONT_HERSHEY_SIMPLEX, 1.2, (0, 255, 255), 2) # Write the number of detected fingers on the image
return img
if __name__ == '__main__':
init()
cap = cv2.VideoCapture(-1) # Read camera
while True:
ret, img = cap.read()
if ret:
frame = img.copy()
Frame = run(frame)
frame_resize = cv2.resize(Frame, (320, 240))
cv2.imshow('frame', frame_resize)
key = cv2.waitKey(1)
if key == 27:
break
else:
time.sleep(0.01)
cv2.destroyAllWindows()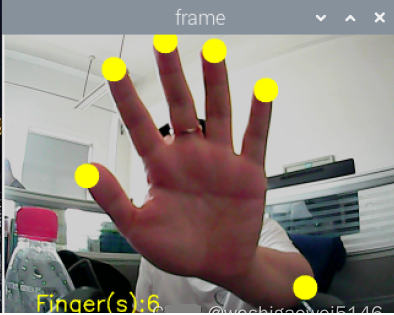
Shape Recognition
import sys
import cv2
import math
import time
import threading
import numpy as np
import HiwonderSDK.tm1640 as tm
import RPi.GPIO as GPIO
GPIO.setwarnings(False)
GPIO.setmode(GPIO.BCM)
color_range = {'red': [(0, 101, 177), (255, 255, 255)], 'green': [(47, 0, 135), (255, 119, 255)], 'blue': [(0, 0, 0), (255, 255, 115)], 'black': [(0, 0, 0), (41, 255, 136)], 'white': [(193, 0, 0), (255, 250, 255)], }
if sys.version_info.major == 2:
print('Please run this program with python3!')
sys.exit(0)
range_rgb = {
'red': (0, 0, 255),
'blue': (255, 0, 0),
'green': (0, 255, 0),
'black': (0, 0, 0),
'white': (255, 255, 255),
}
# Find the largest contour based on area
# Parameters are the list of contours to compare
def getAreaMaxContour(contours):
contour_area_temp = 0
contour_area_max = 0
area_max_contour = None
for c in contours: # Iterate through all contours
contour_area_temp = math.fabs(cv2.contourArea(c)) # Calculate contour area
if contour_area_temp > contour_area_max:
contour_area_max = contour_area_temp
if contour_area_temp > 50: # Only valid if area is greater than 50, to filter interference
area_max_contour = c
return area_max_contour, contour_area_max # Return the largest contour
shape_length = 0
def move():
global shape_length
while True:
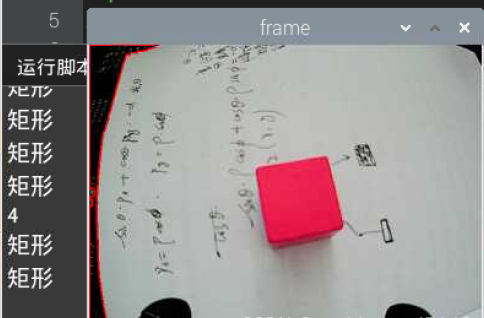
if shape_length == 3:
print('Triangle')
## Display 'Triangle'
tm.display_buf = (0x80, 0xc0, 0xa0, 0x90, 0x88, 0x84, 0x82, 0x81,
0x81, 0x82, 0x84, 0x88, 0x90, 0xa0, 0xc0, 0x80)
tm.update_display()
elif shape_length == 4:
print('Rectangle')
## Display 'Rectangle'
tm.display_buf = (0x00, 0x00, 0x00, 0x00, 0xff, 0x81, 0x81, 0x81,
0x81, 0x81, 0x81, 0xff, 0x00, 0x00, 0x00, 0x00)
tm.update_display()
elif shape_length >= 6:
print('Circle')
## Display 'Circle'
tm.display_buf = (0x00, 0x00, 0x00, 0x00, 0x1c, 0x22, 0x41, 0x41,
0x41, 0x22, 0x1c, 0x00, 0x00, 0x00, 0x00, 0x00)
tm.update_display()
time.sleep(0.01)
# Run a sub-thread
th = threading.Thread(target=move)
th.setDaemon(True)
th.start()
shape_list = []
action_finish = True
if __name__ == '__main__':
cap = cv2.VideoCapture(-1)
while True:
ret, img = cap.read()
if ret:
img_copy = img.copy()
img_h, img_w = img.shape[:2]
frame_gb = cv2.GaussianBlur(img_copy, (3, 3), 3)
frame_lab = cv2.cvtColor(frame_gb, cv2.COLOR_BGR2LAB) # Convert image to LAB space
max_area = 0
color_area_max = None
areaMaxContour_max = 0
if action_finish:
for i in color_range:
if i != 'white':
frame_mask = cv2.inRange(frame_lab, color_range[i][0], color_range[i][1]) # Perform bitwise operation on original image and mask
opened = cv2.morphologyEx(frame_mask, cv2.MORPH_OPEN, np.ones((6, 6), np.uint8)) # Opening operation
closed = cv2.morphologyEx(opened, cv2.MORPH_CLOSE, np.ones((6, 6), np.uint8)) # Closing operation
contours = cv2.findContours(closed, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)[-2] # Find contours
areaMaxContour, area_max = getAreaMaxContour(contours) # Find maximum contour
if areaMaxContour is not None:
if area_max > max_area: # Find maximum area
max_area = area_max
color_area_max = i
areaMaxContour_max = areaMaxContour
if max_area > 200:
cv2.drawContours(img, areaMaxContour_max, -1, (0, 0, 255), 2)
# Recognize shape
# Perimeter 0.035 Modify according to recognition situation, the better the recognition, the smaller
epsilon = 0.035 * cv2.arcLength(areaMaxContour_max, True)
# Contour similarity
approx = cv2.approxPolyDP(areaMaxContour_max, epsilon, True)
shape_list.append(len(approx))
if len(shape_list) == 30:
shape_length = int(round(np.mean(shape_list)))
shape_list = []
print(shape_length)
frame_resize = cv2.resize(img, (320, 240))
cv2.imshow('frame', frame_resize)
key = cv2.waitKey(1)
if key == 27:
break
else:
time.sleep(0.01)
my_camera.camera_close()
cv2.destroyAllWindows()The approxPolyDP() function is used to approximate a continuous smooth curve to a polygon.
For example, in the code “approx = cv2.approxPolyDP(areaMaxContour_max, epsilon, True)”, the parameters in parentheses are as follows:
The first parameter “areaMaxContour_max” is the input shape contour;
The second parameter “epsilon” is the distance value, indicating how close the polygon’s contour is to the actual contour; the smaller the value, the more accurate;
The third parameter “True” indicates that the contour is a closed curve.
The output of the cv2.approxPolyDP() function is the vertex coordinates of the approximate polygon, which can be used to determine the shape based on the number of vertices.
Barcode Recognition
First, install pyzbar, pip3 install pyzbar
import cv2
import sys
from pyzbar import pyzbar
if sys.version_info.major == 2:
print('Please run this program with python3!')
sys.exit(0)
def run(image):
# Find barcodes in the image and decode each barcode
barcodes = pyzbar.decode(image)
# Loop through detected barcodes
for barcode in barcodes:
# Extract the bounding box position of the barcode
(x, y, w, h) = barcode.rect
# Draw a rectangle around the barcode in the image
cv2.rectangle(image, (x, y), (x + w, y + h), (0, 0, 255), 2)
barcodeData = barcode.data.decode("utf-8")
barcodeType = barcode.type
# Draw barcode data and type on the image
text = "{} ({})".format(barcodeData, barcodeType)
cv2.putText(image, text, (x, y - 10), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 0, 255), 2)
return image
if __name__ == '__main__':
cap = cv2.VideoCapture(-1) # Read camera
while True:
ret, img = cap.read()
if ret:
frame = img.copy()
Frame = run(frame)
cv2.imshow('Frame', Frame)
key = cv2.waitKey(1)
if key == 27:
break
else:
time.sleep(0.01)
cv2.destroyAllWindows()
QR Code Recognition
Install apriltag, but the installation failed. Still, the old method is to download locally and then install.
At https://www.piwheels.org/simple/apriltag/, I downloaded apriltag-0.0.16-cp37-cp37m-linux_armv7l.whl.
Use FileZilla to transfer to the Raspberry Pi, open the directory where the whl file is located on the Raspberry Pi, and install the whl file, which shows successful installation.
cd /home/pi/Downloads
sudo pip3 install apriltag-0.0.16-cp37-cp37m-linux_armv7l.whl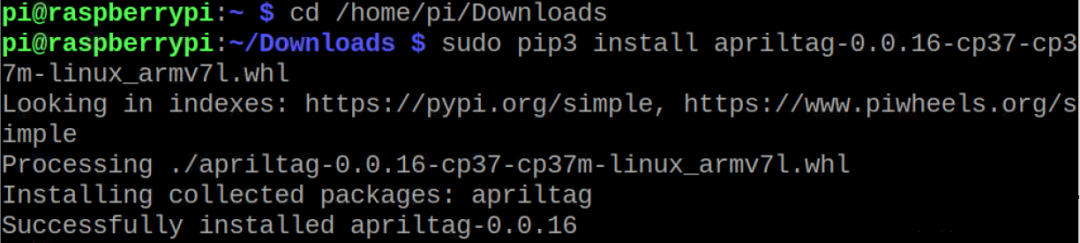
import sys
import cv2
import math
import time
import threading
import numpy as np
import apriltag
# apriltag detection
if sys.version_info.major == 2:
print('Please run this program with python3!')
sys.exit(0)
object_center_x = 0.0
object_center_y = 0.0
# Detect apriltag
detector = apriltag.Detector(searchpath=apriltag._get_demo_searchpath())
def apriltagDetect(img):
global object_center_x, object_center_y
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
detections = detector.detect(gray, return_image=False)
if len(detections) != 0:
for detection in detections:
corners = np.rint(detection.corners) # Get four corner points
cv2.drawContours(img, [np.array(corners, np.int)], -1, (0, 255, 255), 2)
tag_family = str(detection.tag_family, encoding='utf-8') # Get tag_family
tag_id = int(detection.tag_id) # Get tag_id
object_center_x, object_center_y = int(detection.center[0]), int(detection.center[1]) # Center point
object_angle = int(math.degrees(math.atan2(corners[0][1] - corners[1][1], corners[0][0] - corners[1][0]))) # Calculate rotation angle
return tag_family, tag_id
return None, None
def run(img):
global state
global tag_id
global action_finish
global object_center_x, object_center_y
img_h, img_w = img.shape[:2]
tag_family, tag_id = apriltagDetect(img) # apriltag detection
if tag_id is not None:
print('X:', object_center_x, 'Y:', object_center_y)
cv2.putText(img, "tag_id: " + str(tag_id), (10, img.shape[0] - 30), cv2.FONT_HERSHEY_SIMPLEX, 0.65, [0, 255, 255], 2)
cv2.putText(img, "tag_family: " + tag_family, (10, img.shape[0] - 10), cv2.FONT_HERSHEY_SIMPLEX, 0.65, [0, 255, 255], 2)
else:
cv2.putText(img, "tag_id: None", (10, img.shape[0] - 30), cv2.FONT_HERSHEY_SIMPLEX, 0.65, [0, 255, 255], 2)
cv2.putText(img, "tag_family: None", (10, img.shape[0] - 10), cv2.FONT_HERSHEY_SIMPLEX, 0.65, [0, 255, 255], 2)
return img
if __name__ == '__main__':
cap = cv2.VideoCapture(-1) # Read camera
while True:
ret, img = cap.read()
if ret:
frame = img.copy()
Frame = run(frame)
cv2.imshow('Frame', Frame)
key = cv2.waitKey(1)
if key == 27:
break
else:
time.sleep(0.01)
cv2.destroyAllWindows()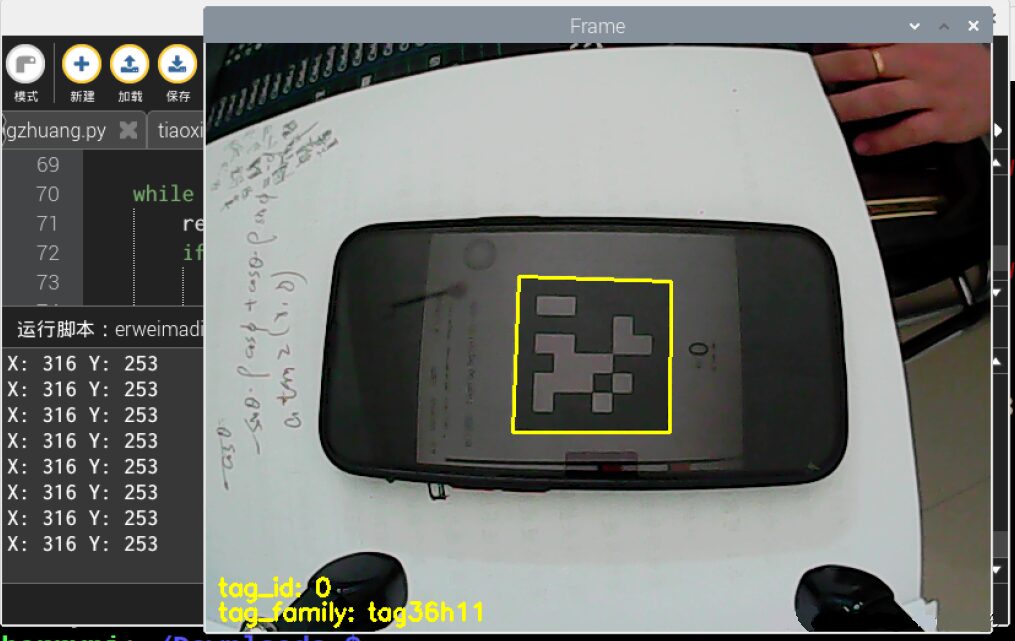
Troubleshooting
module ‘cv2’ has no attribute ‘dnn’
Trying the following commands all had issues, either reporting errors or showing that python-opencv could not be recognized; changing mirrors did not help:
sudo apt install python-opencv
or sudo apt install python3-opencv
sudo apt-get install opencv-python
sudo apt-get install opencv-contrib-python
pip install opencv-contrib-python
pip install opencv-pythonFinally, successfully installed by downloading the local file. First, update the Raspberry Pi system and files.
sudo apt-get update
sudo apt-get upgradeIf the download speed is too slow, consider changing the source.
1) Use "sudo nano /etc/apt/sources.list" to edit the sources.list file, comment out all content in the original file, and append the following content:
deb http://mirrors.aliyun.com/raspbian/raspbian/ buster main contrib non-free rpi
deb-src http://mirrors.aliyun.com/raspbian/raspbian/ buster main contrib non-free rpi
Use Ctrl+O to save the file, Ctrl+X to exit.
2) Use "sudo nano /etc/apt/sources.list.d/raspi.list" to edit the raspi.list file, comment out all content in the original file, and append the following content:
deb http://mirrors.tuna.tsinghua.edu.cn/raspbian/raspbian/ buster main
deb-src http://mirrors.tuna.tsinghua.edu.cn/raspbian/raspbian/ buster main
Use Ctrl+O to save the file, Ctrl+X to exit.
3) Execute "sudo apt-get update" command.
4) To speed up Python pip installation, change the Python software source, operation method: open the Raspberry Pi command line, input the command below:
pip config set global.index-url https://pypi.tuna.tsinghua.edu.cn/simple
pip install pip -U
5) Finally, input the command "sudo reboot" to restart the Raspberry Pi.Download whl files and transfer them to the Raspberry Pi, open https://www.piwheels.org/simple/opencv-python/ on your computer.
Download the whl file corresponding to your python version. I downloaded opencv_python-3.4.10.37-cp37-cp37m-linux_armv7l.whl.
cp37 indicates the python version, armv7 indicates the processor architecture, and Raspberry Pi 4B chooses armv7.
Transfer it using FileZilla to the Raspberry Pi, open the directory where the whl file is located on the Raspberry Pi, and install the whl file, which shows successful installation of opencv-python.
cd /home/pi/Downloads
sudo pip3 install opencv_python-3.4.10.37-cp37-cp37m-linux_armv7l.whlReference: https://blog.csdn.net/weixin_57605235/article/details/121512923
ImportError:numpy.core.multiarray failed to import
First uninstall the low version of numpy, then install the new version of numpy, that is:
1. pip uninstall numpy
2. pip install -U numpyFrom https://blog.csdn.net/qq_25603827/article/details/107824977
Invalid.
pip install numpy --upgrade --forceFrom http://www.manongjc.com/article/38668.html
Invalid.
Check the local numpy version:
pip show numpyWhen we installed opencv-python, the corresponding numpy version is:
So we can downgrade numpy version:
pip install -U numpy==1.14.5 -i https://pypi.mirrors.ustc.edu.cn/simple/From https://zhuanlan.zhihu.com/p/280702247
Invalid.
Finally, successfully used pip3 install -U numpy. So it’s best to use pip3 for python3. There are many attempted methods online, some for upgrading versions, some for downgrading versions, various strange phenomena emerge, and the statements vary, reference:
https://blog.csdn.net/Robin_Pi/article/details/120544691
https://zhuanlan.zhihu.com/p/29026597
1121:error:(-2:Unspecified error) FAILED: fs.is_open(). Can’t open
After searching for a while, I found that there was an extra dot at the beginning.
If you find this useful, please like, bookmark, and share it with friends
Related exciting articlesLinks:
[Previous] Using OpenCV to Explore Face Recognition – Reading Images, Grayscale Conversion, Size Modification, Drawing Rectangles Quick Start
Face Mask Detection (Including Running Code + Dataset) Pytorch + TensorRT + Xavier NX
Image Processing: Using Numpy and OpenCV to Implement Fourier and Inverse Fourier Transform
“A community focused on sharing knowledge about 3D vision”
3D Vision AI Open Platform
The 3D Vision Developer Community has launched a brand new section – 3D Vision AI Open Platform is officially online!
The AI open platform has five major functional sections: 3D face reconstruction, face detection, face comparison, face search, and liveness detection and various tool applications, providing powerful AI data intelligence analysis and scene application experience, building cloud + end integrated services!
Welcome all developers to enter the 3D Vision Developer Community [Open Platform] to experience all functions for free!
