S
Abstract
-
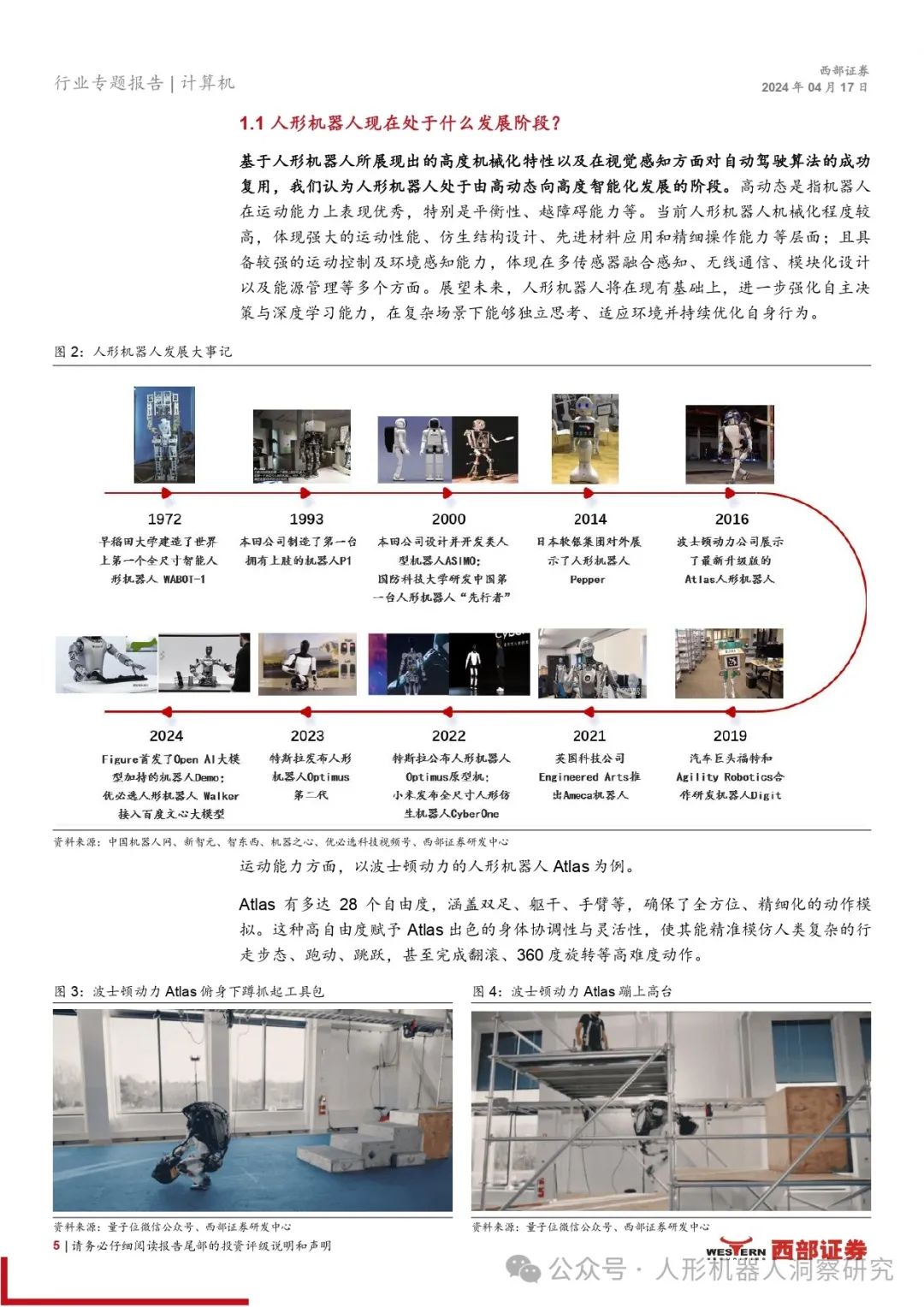
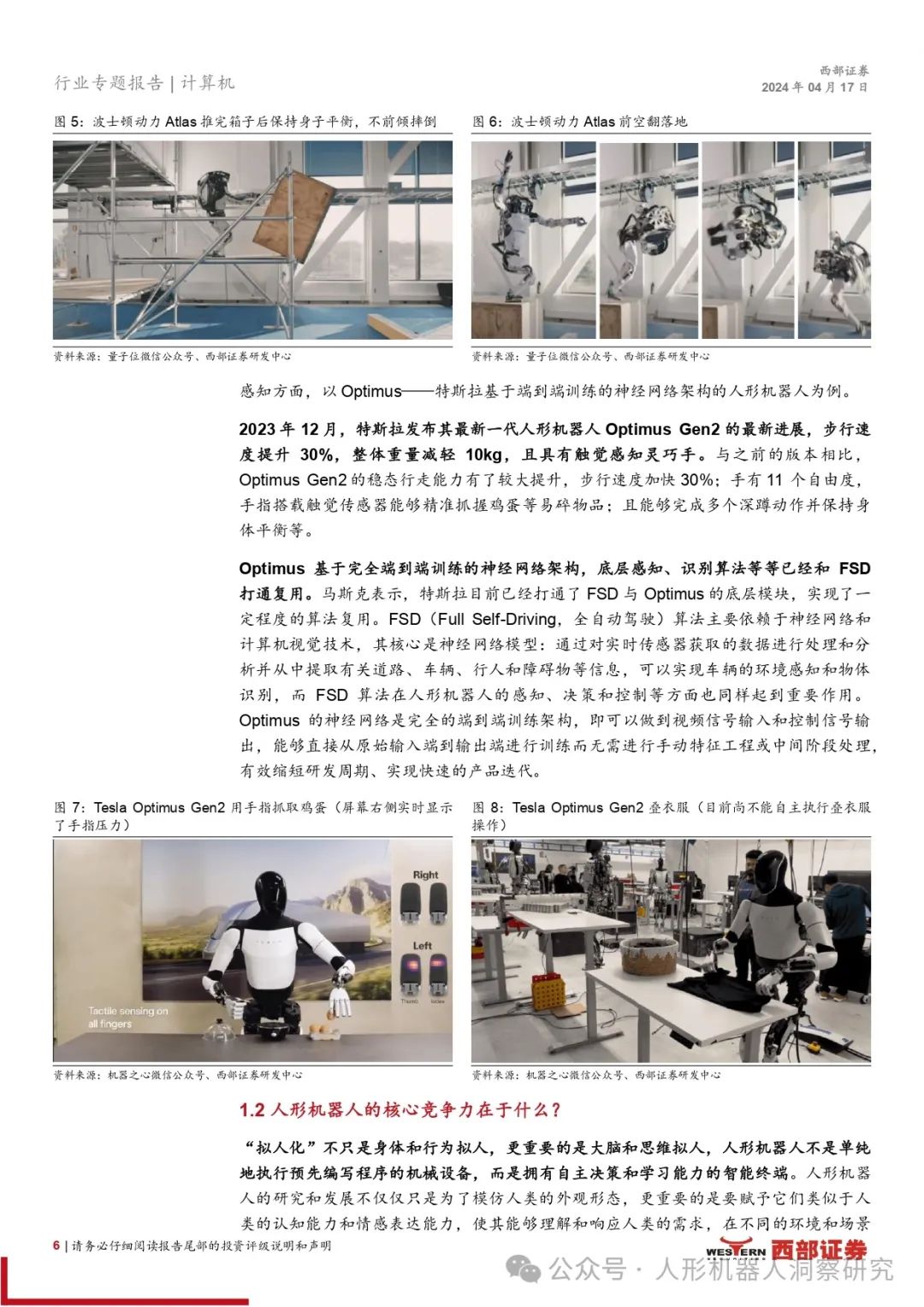
Based on the highly mechanized characteristics exhibited by humanoid robots and the successful reuse of autonomous driving algorithms in visual perception, humanoid robots are in a stage of development from high dynamics to high intelligence. High dynamics refers to the robot’s excellent performance in mobility, especially in balance and obstacle-crossing capabilities. Currently, humanoid robots are highly mechanized and possess strong motion control and environmental perception capabilities. In terms of motion control, Boston Dynamics’ Atlas humanoid robot has outstanding body coordination, completing difficult movements such as rolling in addition to walking; in terms of perception, Tesla’s Optimus is based on a fully end-to-end trained neural network architecture, with underlying perception and recognition algorithms already integrated with FSD for reuse.
-
The core competitiveness of humanoid robots lies in their universality and generalization, that is, the degree of intelligence, which refers to their high adaptability and self-learning ability in the face of various unknown environments, tasks, and interaction scenarios. The original design intention of humanoid robots is to mimic human form and behavioral capabilities, allowing them to seamlessly use all basic infrastructure and tools designed for humans to perform tasks in various environments, improving productivity, especially in replacing humans in potentially dangerous, difficult, or unsuitable tasks. The commercialization process of humanoid robots is deeply influenced by the limitations of application scenarios; increasing their intelligence can significantly broaden the application scenarios of humanoid robots, breaking existing limitations and enhancing their adaptability to complex environments and flexibility in task execution.
Main Content of the Report