In the field of artificial intelligence and robotics, the development of flexible microbots is entering the fast lane. They can not only perform colonoscopies and minimally invasive surgeries but also delicately retouch classical paintings. This is all thanks to passive compliance technology, which allows robots to adjust their state according to task requirements, improving efficiency and safety. However, researchers at Harvard University believe that enhancing robot efficiency and safety comes at a cost, as passive compliance limits their payload capacity, thereby restricting the types of tasks the robots can perform.
To address this issue, researchers proposed a new method by designing a “soft robotic arm” that enhances the arm’s strength through a concept of localized reinforcement, enabling it to handle larger payloads. This localized reinforcement is achieved through Variable Stiffness Actuators (VSA), which control the arm’s flexibility using lever arms, spring mechanisms, shape memory materials, and components that change with temperature. VSA allows the robotic arm to actively adjust its intrinsic compliance during movement, resulting in faster and safer motion control.
The inspiration for this research comes from nature, specifically sea cucumbers, which use rigidity to protect themselves from predators. Sea cucumbers exhibit softness when flexibility is needed but become hard when they need to remain fixed. This concept of variability has been successfully applied in robotics, achieving a balance of flexibility and strength through antagonistic actuation.
Researchers at MIT have also adopted a flexible and compliant approach, developing a robotic system capable of grasping objects and applying fine-tuned forces to perform various tasks, such as writing with a pen or dispensing liquid with a syringe. This system, known as “series elastic end effectors,” utilizes soft grippers and cameras to filter activities in six-dimensional space, achieving both flexibility and precision in robotics.
These studies indicate that flexibility and compliance are key to the future development of robotics. By enhancing the payload capacity of robotic arms while maintaining their ability to navigate complex environments and interact safely with humans and fragile objects, robots can be applied more broadly across various fields. Continuous innovation in this area will bring new possibilities for robotic technology, sparking thoughts about the potential applications of robots in the future.
Help me organize the following content into a deep analysis article, requiring the article to be condensed to around 600 words. Do not directly copy the materials from the document below; instead, rephrase and reorganize the language. At the same time, extract a title.
Currently, AI robots have made significant progress in minor activities.
Some robots perform colonoscopies and conduct microsurgeries on blood vessels and nerve cells, design circuit boards, and manufacture exquisite watches, as well as delicately retouching the faded and aging works of classical painting masters.
Robots can handle fragile items due to what researchers call passive compliance, which allows them to change their state according to specific tasks. For instance, their “hands” can adjust their shape to accommodate uniquely shaped instruments. Additionally, they can adjust pressure to grasp a wide range of objects, from heavy boxes to fragile flasks containing volatile chemicals, to perform delicate surgeries.
This passive compliance allows robotic structures to yield or deform when encountering external forces. It ensures more effective interaction with human subjects and, more importantly, ensures safer operations.
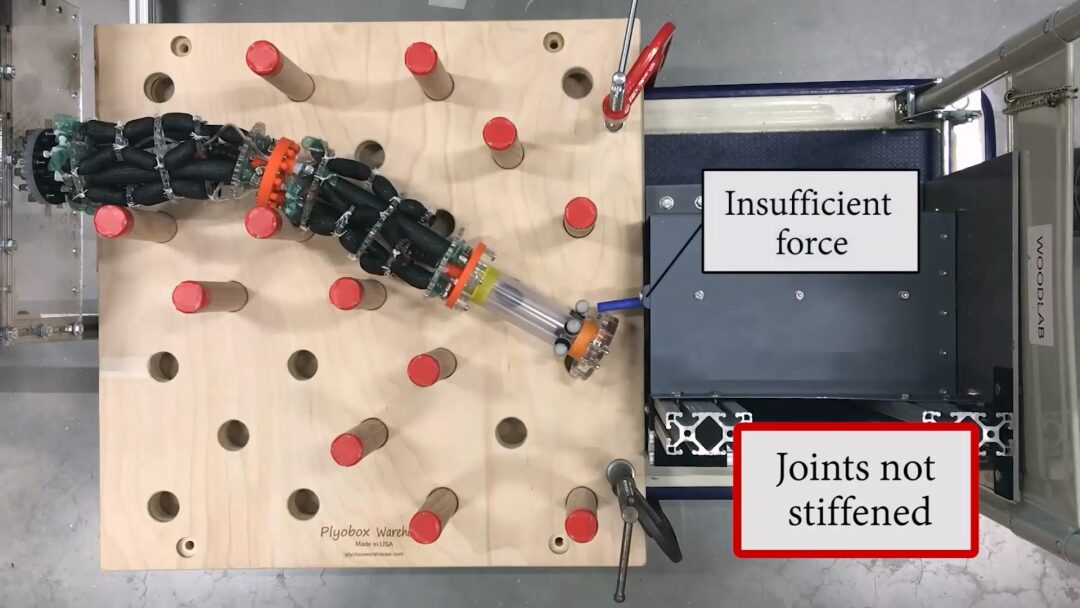
However, researchers at Harvard University point out that increasing efficiency and safety comes at a cost. They argue that passive compliance limits payload capacity, thus restricting the types of activities robots can handle.
Consequently, they designed a model with improvements that could potentially “enhance (the robotic arm’s) efficiency in various tasks, including object manipulation and exploration of cluttered environments,” as stated in a paper published on August 30 in the journal Science Robotics.
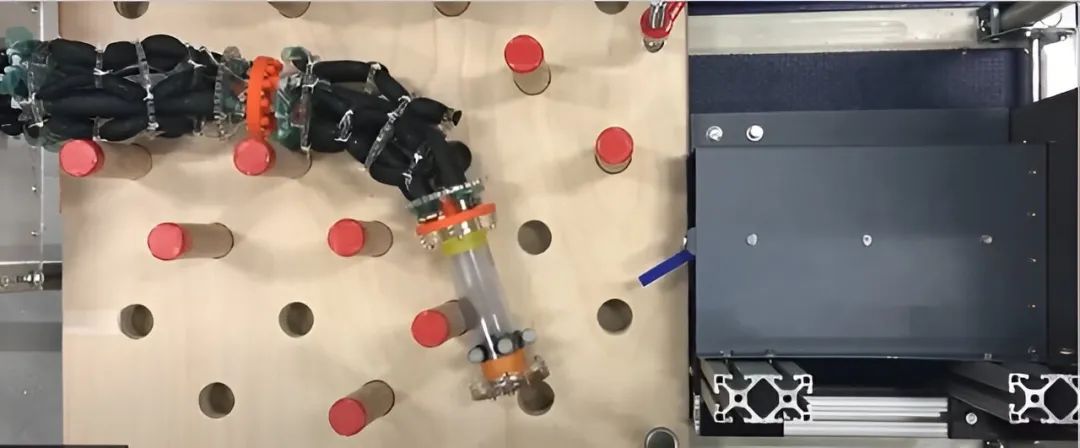
These “soft robotic arms” employ a concept of localized body reinforcement, effectively enhancing the arm’s strength to handle larger payloads. This reinforcement is achieved through the use of Variable Stiffness Actuators (VSA), which control the arm’s flexibility through lever arms, spring mechanisms, shape memory materials, and temperature-dependent components.
Daniel Bruder, one of the authors of the study, stated, “VSA enables rigid robots to actively adjust their intrinsic compliance during operation, resulting in faster and safer motion control,” adding, “by localized reinforcement, we can improve the effective payload capacity of soft robotic arms.”
Observers can see the concept of variable rigidity at work in nature. Sea cucumbers utilize rigidity to protect themselves from predators; when threatened, their exterior hardens instantly. Sea cucumbers exhibit flexibility when burrowing in muddy seafloors but harden when they need to remain fixed.
“Our hardware experiments demonstrate the practical advantages of adjustable compliance and the feasibility of achieving this function through antagonistic actuation,” Bruder said.
Researchers at MIT have also addressed similar issues. The Computer Science and Artificial Intelligence Laboratory at MIT, in collaboration with the Toyota Research Institute, developed a robot capable of grasping objects and applying fine-tuned forces to perform tasks such as writing words or dispensing liquid with a syringe.
This system, known as “series elastic end effectors,” uses soft grippers and cameras to filter activities in six-dimensional space—left/right, up/down, forward/backward, yaw, roll, and pitch.
As explained in a blog post from MIT last year, “Rigid robots and their counterparts can only take us so far; softness and compliance allow us to deform luxuriously, enabling the perception of interaction between tools and hands.”
Bruder from Harvard stated that his team’s research will lead to the development of more capable robotic arms, “by increasing their payload capacity without sacrificing their ability to navigate in cluttered environments and interact safely with humans and fragile objects.”
—————–END——————-