The “Marriage” of Embedded Systems and Communication Protocols
In today’s wave of digitalization, embedded systems are like a magical “behind-the-scenes hero,” quietly penetrating every aspect of our lives. When you drive a car, the embedded system in the engine control system accurately adjusts fuel injection and ignition timing, ensuring efficient and stable power output; the smart navigation system in the car uses embedded technology to guide routes in real-time, avoiding congestion. Back at home, with a plethora of smart appliances, embedded systems enable refrigerators to intelligently control temperature and manage ingredients, air conditioners to automatically adjust temperatures for a comfortable environment, and lighting to change brightness and color according to the environment and mood. In the industrial field, from automated production lines to smart grids, embedded systems are the core pillar, monitoring in real-time and controlling precisely, significantly improving production efficiency and energy utilization.
However, these smart devices do not exist in isolation; they are like well-coordinated “teammates” that need to communicate and work together, which brings the crucial role of communication protocols into play. Communication protocols act like a universal “language specification,” bridging data transmission and interaction between different devices. They detail key elements such as data format, transmission rate, and error checking, ensuring devices understand each other and communicate smoothly, allowing smartphones to remotely control appliances in smart home systems and controllers and sensors to share data in industrial automation in real-time.
In the realm of embedded system development, C++ has become a powerful tool for implementing communication protocols due to its outstanding characteristics. It possesses the low-level control capabilities of C language, which is close to hardware and executes efficiently, while also integrating object-oriented programming paradigms, making code structured, modular, and easy to maintain and expand. With its rich libraries and template mechanisms, C++ can efficiently handle complex data structures and algorithms, easily meeting the diverse demands of communication protocols, whether building small IoT sensor nodes or large industrial control systems. C++ injects powerful momentum into embedded system communication, unlocking infinite possibilities for smart interconnectivity.
Unveiling Mainstream Communication Protocols
Serial Communication: UART, SPI, I2C Each Show Their Skills
UART (Universal Asynchronous Receiver-Transmitter), as a veteran of serial communication, has a simple yet practical principle. It transmits data bit by bit, like a patient “messenger” passing information in order. In asynchronous mode, the sending and receiving parties do not need synchronized clocks, relying only on start and stop bits to mark the beginning and end of data frames, much like a pre-agreed simple code. For early computers communicating with serial devices, UART shines, as its transmission rate is relatively limited, but due to its simple hardware connections and straightforward programming, it roots itself in scenarios requiring less speed and short-distance data exchanges, such as debugging serial output device status information and simple data exchanges between low-cost microcontrollers.
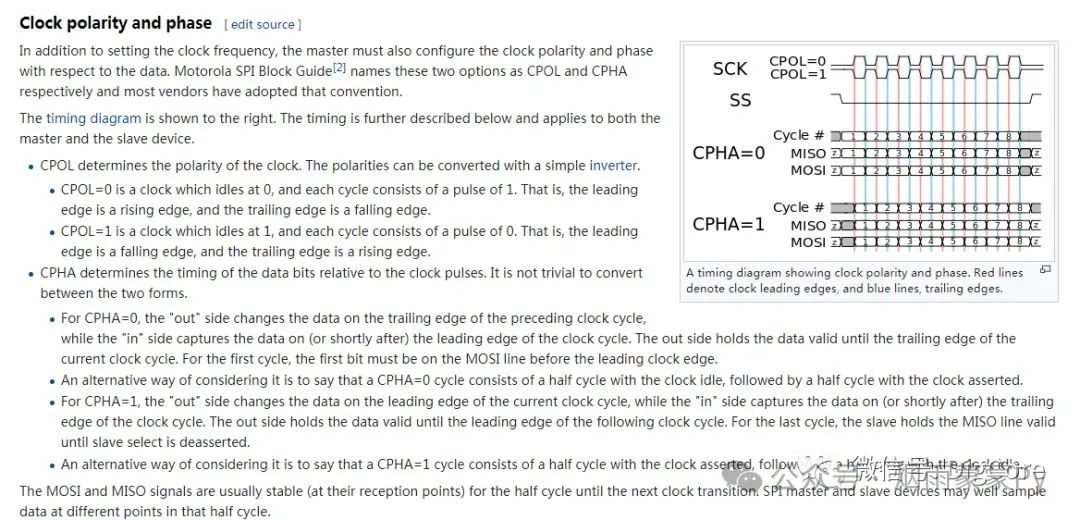
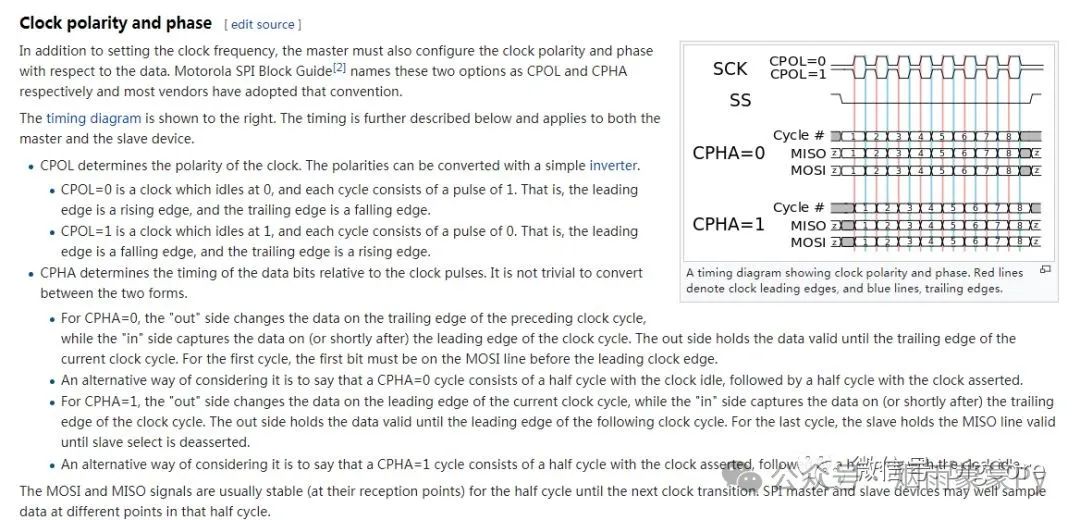
SPI (Serial Peripheral Interface) acts like an efficient “courier,” with high-speed and synchronous data transmission. It operates in a master-slave mode, where the master device controls the clock, driving data across four lines (clock, data input, output, chip select), with multiple slave devices responding to the chip select signal. This makes it excel in scenarios that require fast read/write operations with external chips, such as connecting high-speed ADCs (Analog-to-Digital Converters) to collect high-frequency data from sensors or driving displays to refresh images in real-time. SPI can ensure smooth data flow at MHz-level speeds; however, due to its multi-line connections and master-slave architecture, wiring can be slightly complex, making it suitable for short-distance communication links that demand speed and have a clear master-slave relationship.
I2C (Inter-Integrated Circuit) is like a well-coordinated “conductor,” allowing multiple devices to “talk” on the same bus using only two wires (clock and data). It adopts address recognition, with the master device signaling to address slave devices, achieving many-to-many communication in an elegant half-duplex mode, time-sharing bus resources. It is commonly used to connect various low-speed sensors, EEPROMs (Electrically Erasable Programmable Read-Only Memory), etc., such as temperature and humidity sensors reporting environmental data to microcontrollers. Due to its simple wiring and support for multiple devices, it is favored in resource-sensitive, densely populated small embedded systems; however, its speed is slightly slower than SPI, making it an optimal choice for low-power, low-cost low-speed communication.
Comparing the three, UART is simple and low-speed, SPI is high-speed with clear master-slave roles, and I2C allows multiple devices to share a low-speed bus, enabling developers to weigh factors such as system performance, hardware layout, cost, and power consumption when bridging different modules.
Bus Communication: CAN, LIN, USB Collaborate
CAN (Controller Area Network) bus is the “backbone” in automotive electronics, designed to cope with complex electromagnetic interference and stringent real-time requirements in vehicle environments. It transmits based on differential signaling, with two twisted wires resistant to noise, ensuring accurate data transmission even in the presence of strong electromagnetic noise from the engine compartment. It employs a non-destructive arbitration mechanism, allowing multiple nodes to contend for the bus simultaneously, prioritizing the highest priority messages to ensure that critical system commands, such as brakes and power, are delivered in real-time, safeguarding driving safety. It is widely used for communication among various electronic control units in automotive power, chassis, and body systems, playing a key role in the modern automotive “nervous system.”
LIN (Local Interconnect Network) bus serves as a supplement to CAN, acting as a low-cost, low-speed “light cavalry.” It typically transmits on a single wire, operating in a simple master-slave architecture, excelling in areas such as window lifts and seat adjustments, where real-time requirements are lower, and control is relatively simple. When paired with CAN, it builds a clear hierarchical communication network within the vehicle, reducing costs while meeting diverse needs, such as small electric window control modules, where LIN can competently handle information exchanges without the high cost of CAN being overkill.
USB (Universal Serial Bus) is the “universal key” for connecting external devices, from transferring data with everyday USB drives to inputting with mice and keyboards, to connecting high-speed data acquisition devices in industrial settings. Its high speed and plug-and-play convenience have conquered the world. Different versions (from USB 1.0 to USB 3.x) span a wide range of speeds and power capabilities, with standardized interfaces and driver systems allowing devices to be instantly recognized and communicate rapidly with computers and industrial hosts, while the complex enumeration and handshake processes behind the scenes are abstracted away from users and developers, providing great convenience.