High-quality computer knowledge books, PDF materials, and personal notes mainly focus on embedded systems, microcontrollers, and Linux: https://github.com/imKeYan/EmbedBooks?tab=readme-ov-fileAccess method: See the end of the article! (Note: Content is continuously updated!)1. Battery Management System (BMS) (New Energy Vehicles, Energy Storage Systems):Project Overview: An intelligent battery management system needs to have real-time monitoring, charge and discharge management, battery state estimation, fault diagnosis and early warning, battery balancing management, temperature management, data collection and analysis, remote monitoring and control, battery performance prediction, and user interaction interface, among other functions. These features collectively ensure the safe, stable, and efficient operation of the battery, extending its lifespan and improving energy utilization. 2. STM32 Motor Control
2. STM32 Motor Control Basic Knowledge of FOC: (After joining the group, click directly into the Feishu document!)Project Document Link:FOC Hardware Solution:PMSM Sensorless FOC Control:3. FOCProject Overview:FOC fan solution, including a rotor observer, sensorless FOC algorithm, PID tuning code, complete error information, and bidirectional start algorithm.
Basic Knowledge of FOC: (After joining the group, click directly into the Feishu document!)Project Document Link:FOC Hardware Solution:PMSM Sensorless FOC Control:3. FOCProject Overview:FOC fan solution, including a rotor observer, sensorless FOC algorithm, PID tuning code, complete error information, and bidirectional start algorithm. 4. Sensorless FOC Drive Code for Permanent Magnet Synchronous MotorProject Overview:A complete set of sensorless FOC drive code for Permanent Magnet Synchronous Motors (PMSM) is provided, suitable for various MCU platforms. The code uses high-frequency injection start method and smoothly transitions to the observer for high-speed control. All code is handwritten and open-source, making it easy for users to port and further develop. Additionally, a high-frequency injection simulation model is included to help users better understand and debug the system.Functional Features
4. Sensorless FOC Drive Code for Permanent Magnet Synchronous MotorProject Overview:A complete set of sensorless FOC drive code for Permanent Magnet Synchronous Motors (PMSM) is provided, suitable for various MCU platforms. The code uses high-frequency injection start method and smoothly transitions to the observer for high-speed control. All code is handwritten and open-source, making it easy for users to port and further develop. Additionally, a high-frequency injection simulation model is included to help users better understand and debug the system.Functional Features
- Sensorless FOC Drive: Suitable for permanent magnet synchronous motors, achieving precise control without position sensors.
- High-Frequency Injection Start: Uses high-frequency injection technology to ensure stability and reliability during the motor startup phase.
- Smooth Transition to Observer: Smoothly switches to observer control after startup, achieving precise control during high-speed operation.
- Handwritten Open-Source Code: All code is handwritten, open-source, and transparent, making it easy for users to understand and modify.
- Multi-Platform Portability: Code is designed flexibly for easy porting to various MCU platforms.
- Included Simulation Model: Provides a high-frequency injection simulation model to assist users in system simulation and debugging.
5. Flight Control
[STM32F103] – 6 Axis Sensor MPU6050 – Quaternion and Euler Angle Calculation – PID Controller
-
Sensor Fusion: Flight control systems typically include sensors such as gyroscopes, accelerometers, and magnetometers to obtain the drone’s attitude, speed, and position information. Through sensor fusion algorithms (such as Kalman filtering), data from multiple sensors is integrated to improve flight accuracy.
-
Attitude Control: Based on sensor data, the flight control system calculates the drone’s attitude and adjusts motor speeds through a PID controller to maintain stable flight.
-
Navigation and Positioning: By combining GPS or other positioning systems, the flight control system can achieve autonomous navigation, plan flight paths, and ensure the drone flies along a preset route.
-
Wireless Communication: Communication between the flight control system and the ground station is crucial for sending remote control commands, receiving flight status data, and enabling remote control and real-time monitoring.
-
Fault Detection and Safety Mechanisms: The flight control system should have fault detection capabilities to respond promptly to anomalies, such as switching to backup mode or emergency landing, ensuring flight safety.
6. AI Car Based on ESP32-CAM:ESP32-CAM is a microcontroller module that integrates Wi-Fi and Bluetooth functions, and it is particularly equipped with a camera interface, making it an ideal choice for building smart robots. This project will demonstrate how to use the ESP32-CAM module to build a simple AI robot. This robot can stream video in real-time to an Android device and perform AI task processing on the Android device.7. Embedded Vehicle Terminal System Qt:
The QT vehicle system is a comprehensive in-vehicle information system developed based on QT6, integrating various functions such as music playback, weather forecasting, map navigation, and video playback.
-
Music Function: The music module in the QT6 vehicle system allows users to play, pause, stop, and control volume. It may support various audio formats and features playlist management, search, and random playback. Through the integrated music library interface, it can easily interact with external music services or locally stored music.
-
Weather Function: Utilizing web APIs, the QT6 vehicle system can obtain and display real-time weather information, including temperature, humidity, wind speed, and weather conditions. The user interface is designed to be intuitive, allowing drivers to quickly understand current and future weather conditions while driving, ensuring driving safety.
-
Map Navigation: The QT6 vehicle map function may use popular open-source map libraries like OpenStreetMap or commercial map services, supporting route planning, positioning, and real-time traffic information display. Users can input destinations via touch or voice commands, and the system will automatically calculate the best route and navigate. Additionally, the map interface design focuses on driver-friendliness, with clear icons and easy-to-understand directional indications to ensure concentration while driving.
-
Video Playback: Considering driving safety, the in-vehicle video playback function may only be available when parked or not driving. QT6 supports decoding various video formats, providing full-screen and small window modes, allowing users to watch movies, video tutorials, and other entertainment content while waiting or resting.
-
From a development perspective, QT6 provides a complete set of development tools, including the Qt Creator IDE, QML (Qt Modeling Language) for declarative programming, and a rich set of Qt libraries, such as Qt Widgets and Qt Quick, enabling developers to build beautiful and efficient user interfaces. Furthermore, QT6 enhances support for multiple platforms, including Linux, Windows, Android, and iOS, allowing the vehicle system to seamlessly adapt to different platforms.
Document 1:
Document 2:
8. Comprehensive Collection of FOC Solutions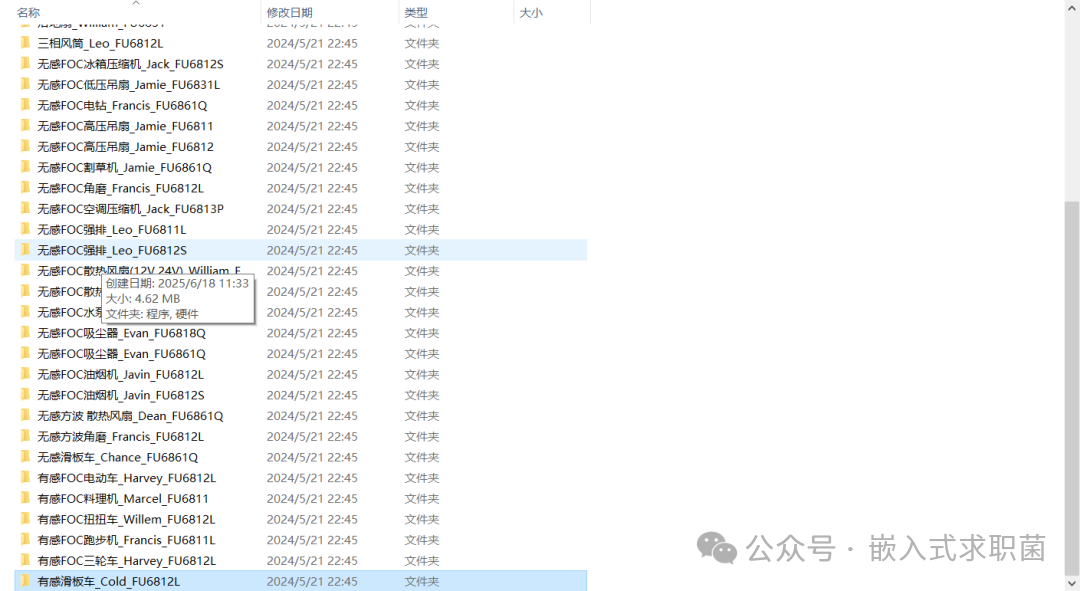 Access method:
Access method: