Abstract:
With the development of computer technology and sensing technology, location-based services (LBS) have gradually become a research hotspot. Based on a ZigBee indoor positioning system designed using Texas Instruments CC2530 chip, a weighted nearest neighbor positioning algorithm based on fuzzy clustering is proposed, and experiments are conducted using the designed ZigBee indoor positioning system. The experimental results show that the average positioning accuracy of the ZigBee indoor positioning system has improved to 1.47 m using the weighted nearest neighbor positioning algorithm based on fuzzy clustering, and a comparison is made with common NN positioning algorithms, KNN positioning algorithms, and Bayesian positioning algorithms.
Citation Format in Chinese: He Haiping, Guo Hang, Fang Shuang. Design of ZigBee Indoor Positioning System Based on Fuzzy Clustering[J]. Application of Electronic Technique, 2016, 42(5): 71-73, 77.Citation Format in English: He Haiping, Guo Hang, Fang Shuang. Research of ZigBee Indoor Positioning System Based on the Fuzzy Clustering[J]. Application of Electronic Technique, 2016, 42(5): 71-73, 77.
1 Introduction
Most human activities take place indoors, making research on indoor positioning and navigation very significant. Currently, indoor positioning methods mainly use [1,2]: ultrasound [3], laser, infrared [4], RFID [5], WiFi [6], image vision [7], etc. This paper uses ZigBee for positioning as it has advantages such as low cost, low power consumption, and low complexity [8]. A ZigBee indoor positioning system is designed using Texas Instruments CC2530 chip, and based on this system, a weighted nearest neighbor positioning algorithm based on fuzzy clustering [9] is proposed, which eliminates a large number of outlier points through fuzzy clustering. Finally, experiments are conducted using the designed ZigBee indoor positioning system and compared with nearest neighbor positioning algorithms, weighted nearest neighbor positioning algorithms, and Bayesian positioning algorithms. The experimental results show that the average positioning accuracy of the proposed fuzzy clustering-based weighted nearest neighbor positioning algorithm has improved.
2 System Overview
2.1 General Introduction of the System
The ZigBee indoor positioning system designed in this paper is a wireless sensor network system with a GUI interface. Monitoring software is installed on the PC terminal, and the coordinator is connected to the PC via a USB-to-serial data cable, allowing real-time viewing, management, and configuration of the ZigBee wireless sensor network. The positions of mobile nodes and reference nodes can be displayed in real-time on the monitoring software on the PC.
2.2 Working Principle of the System
First, a certain number of reference nodes are deployed in the area to be positioned, and the coordinates of the reference nodes are recorded; then, the positioning information of the mobile nodes can be calculated using relevant positioning algorithms. The mobile nodes can send their received RSSI values and physical addresses to the coordinator, which transmits this data to the terminal server via the USB-to-serial data cable, allowing the monitoring software on the PC to display the positions of reference nodes and mobile nodes in real-time [10].
3 Weighted Nearest Neighbor Positioning Algorithm Based on Fuzzy Clustering
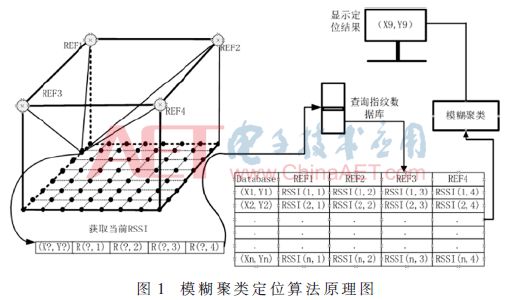
Based on the study of general weighted nearest neighbor positioning algorithms, this paper proposes a new fuzzy clustering-based weighted nearest neighbor fingerprint library positioning algorithm. The principle diagram of the algorithm is shown in Figure 1. First, the weighted nearest neighbor positioning algorithm [11] is used to calculate the positioning coordinates of various unknown points, and then the fuzzy clustering method is used to eliminate a large number of outlier points, thereby improving the positioning accuracy of the system.
3.1 Weighted Nearest Neighbor Positioning Algorithm
First, the preset sampling points used in the offline library building phase are taken as information points in the fingerprint database, denoted as Xi∈{X1, X2, …Xn}; then the online positioning phase begins: when a mobile node enters the area to be positioned, the real-time collected RSSI values are denoted as Z, which are the RSSI values of k reference nodes, i.e., Z=(Z1, Z2, …, Zk). The Euclidean distance between the RSSI values received by the mobile node Z and the previously established fingerprint database Xi is compared, and the point with the smallest Euclidean distance is taken as the positioning point. The formula for Euclidean distance is as follows:
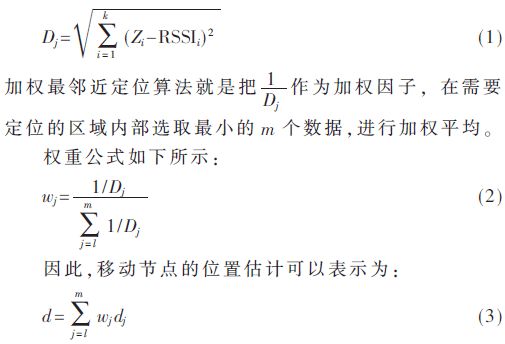
where wj is the weight value corresponding to the j-th point in the fingerprint database, and dj is the corresponding position coordinates of the j-th point.
3.2 Fuzzy Clustering
The definition of clustering is the process of distinguishing and classifying things based on their similarity. The goal of cluster analysis is to divide a set of data in the feature space into several categories [12]. This paper adopts the fuzzy C-means clustering method (FCM).
The purpose of the fuzzy C-means clustering algorithm is to divide a set of n P-dimensional data points X={x1, x2, …xn} into C fuzzy classes Ai(i=1,2,…,C), such that the membership degree Ai(xk) of any component Xk∈RP of X satisfies the following two conditions:
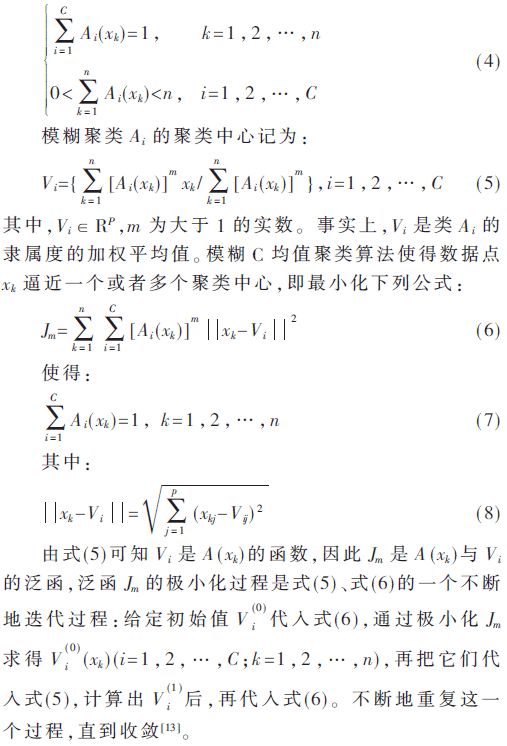
The specific method used in this paper is: first, the unknown coordinates of the unknown point calculated by the weighted nearest neighbor positioning algorithm are obtained, and then the fuzzy C-means clustering algorithm is used to eliminate a large number of outlier points. The data obtained through fuzzy C-means clustering is divided into several classes, and the class with the most data points is retained while other data points are removed. The data obtained after clustering is closer to the actual coordinates, thereby improving the positioning accuracy of the positioning system.
4 Experimental Results Analysis
4.1 Experimental Layout
Experiments are conducted using the designed ZigBee indoor positioning system, establishing a fingerprint database in an experimental area of 5.6 m×5.6 m. A total of 64 fingerprint points’ data were collected during the offline library building phase. In this experiment, 21 points were randomly selected for determination. During the offline library building phase, signal strength values were collected for 120 seconds at each fingerprint data point, and the data was averaged to obtain the fingerprint database; during the online positioning phase, 30 sets of data were obtained for each of the determination points, totaling 21×30=630 sets of data.
4.2 Experimental Results
Using the nearest neighbor positioning algorithm, weighted nearest neighbor positioning algorithm, Bayesian positioning algorithm, and fuzzy C-means positioning algorithm, the data of the 21 randomly selected sampling points were computed, and the positioning results are shown in Table 1.

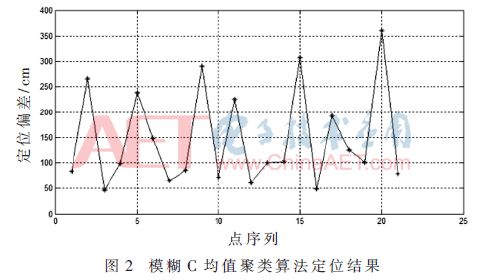
The fuzzy C-means clustering positioning algorithm proposed in this paper was used to process the aforementioned 21 sampling points, and the positioning errors of each point are shown in Figure 2. In the area requiring positioning, the average positioning accuracy of the fuzzy C-means clustering positioning algorithm proposed in this paper reached 1.47 m.
5 Conclusion
This paper proposes a weighted nearest neighbor positioning algorithm based on fuzzy clustering based on the study of general positioning algorithms and applies this algorithm in the designed ZigBee indoor positioning system. The experimental results show that the average positioning accuracy of the ZigBee positioning system can reach 1.47 m after using the fuzzy clustering-based weighted nearest neighbor positioning algorithm, which has better application value compared to ordinary positioning algorithms.
References
[1] Wang Hui. Design and Implementation of Indoor Positioning Algorithm Based on RSSI for Wireless Sensor Networks[D]. Beijing: Beijing University of Posts and Telecommunications, 2010: 16-41.
[2] Xiao Zhu, Wang Yongchao, Tian Bin. Research and Application of Ultra-Wideband Positioning: Review and Prospect[J]. Journal of Electronics, 2011, 39(1): 133-141.
[3] Ye Baoyu, Wang Qinruo, Xiong Jianbin, et al. Research on Indoor Positioning System of Model Ship Based on Ultrasound[J]. Computer Engineering, 2012, 38(19): 258-260, 265.
[4] Hauschildt D, Kirchhof N. Improving Indoor Position Estimation by Combining Active TDOA Ultrasound and Passive Thermal Infrared Localization[C]. IEEE Positioning Navigation and Communication, 2011: 94-99.
[5] Zhang Ying, Li Kai, Wang Jianwei. Design of an Active RFID Local Positioning System[J]. Electronic Design Engineering, 2012, 20(5): 68-70, 74.
[6] Ma Bulin, Yang Fan. Design and Implementation of a WiFi Personnel Positioning GIS System in Coal Mines[J]. Journal of Xi’an University of Science and Technology, 2012, 32(3): 301-305.
[7] Li Xiaowei, Xu Yongjun, Ren Fengyuan. Wireless Sensor Network Technology[M]. Beijing: Beijing Institute of Technology Press, 2007: 191-219.
[8] Zhang Zhengyong, Mei Shunliang. Self-Localization Technology for Wireless Sensor Network Nodes[J]. Computer Engineering, 2007, 33(17): 4-6.
[9] Song Xin. Research on Indoor Positioning Technology Based on Multi-Sensor Fusion[D]. Shanghai: Shanghai Jiao Tong University, 2013.
[10] Liu Xiaokang, Zhang Xiang, Fang Shuang, et al. A New Method of Indoor Positioning Based on ZigBee Wireless Sensor Network[J]. Sensors and Microsystems, 2013, 32(11): 29-30.
[11] King T, Kopf S, Haenselmann T, et al. A Probabilistic Indoor Positioning System Based on 802.11 and Digital Compasses[C]. The First ACM International Workshop on Wireless Network Testbeds, Experimental Evaluation and Characterization. Los Angeles, USA, 2006: 34-40.
[12] Gong Gaiyun. Research on Parameters of FCM Algorithm and Its Application[D]. Xi’an: Xi’an University of Electronic Science and Technology, 2014.
[13] Huang Jingwei, Zhu Fuxi, Kang Lishan. Computational Intelligence[M]. Beijing: Science Press, 2010: 214-218.
Recruitment Information