Introduction: This article provides supplementary rules for the use of WiFi communication modules to assist model car operations in the Intelligent Vision Group and Balanced Beacon Group competitions. The aim is to allow participating teams broader exploration in areas such as vehicle-road collaboration and edge-cloud computing, guiding students to become familiar with the domestic embedded operating system RT-Thread and to build application experience, laying the foundation for constructing complex unmanned systems. This content is a draft proposal, and the official document will be published on the competition website.
Keywords: Intelligent Car Competition, Intelligent Vision, Balanced Beacon, RT-Thread
01 New Rules Overview
1.1 Purpose of New Rules
This article mainly elaborates on the addition of components based on RT-Thread RTOS and WiFi communication modules in the 17th National College Student Intelligent Car Competition for the Intelligent Vision and Balanced Beacon groups. On one hand, it increases the means for students to explore and conveniently complete designated tasks; on the other hand, it integrates concepts like vehicle-road collaboration and edge-cloud collaboration into the intelligent car competition, encouraging participants to further explore the technical principles and practical applications of the domestic embedded operating system RT-Thread RTOS.
Following the principle of not affecting the details of existing rules, not impacting the original competition format, and allowing exploration of new solutions, supplementary rules are made based on existing ones. This mainly includes two aspects:
-
For the Intelligent Vision Group, additional networking methods are allowed to facilitate the acquisition of target information on the competition field and upload key information. -
For the Balanced Beacon Group, the addition of global cameras and networking methods is permitted, allowing teams to use off-site computer vision to assist in locating model cars and traffic lights, helping optimize the model car’s route. Teams can continue to use their original schemes to complete competition tasks or utilize the global camera networking to find lights for more efficient and accurate task completion.
1.2 Preventing Communication Cheating
Due to the addition of wireless communication, measures are taken to prevent:
-
Teams from malicious interference and cheating by others; a dedicated competition WiFi hotspot will be set up on-site, exclusively for the competition model car communication modules; -
Model cars receiving wireless modules must use the ESP8266 communication module provided by the competition organizing committee to filter sent information, only allowing the transmission of specified formatted content.
In the following rules, the on-site WiFi hotspot and ESP8266 modules will be provided by the competition organizers, and the ESP8266 module interface and communication protocol will be uniformly published.
1.3 Network Service IP and Port
During the competition, the on-site WiFi local area network will include:
-
The competition system network server in the Intelligent Vision Group, which provides the coordinates of target locations within the venue for model cars, and receives target identification and location information sent by the model cars; -
The global camera server for the Balanced Beacon Group, providing location information of the model cars and beacons. This server is set up by the participating teams to process images from the global camera and send corresponding location data.
1.3.1 WiFi Local Area Network
The competition model car connects to the on-site WiFi local area network through a dedicated ESP8266 communication module, with the network name and password provided to participating teams on-site;
1.3.2 Server IP Address and Port
The server for the Intelligent Vision Group is provided by the organizing committee, with the corresponding IP address and port number as follows:
● Intelligent Vision Group Server: IP Address: 192.168.0.222 Port Number: 2022
The server for the Balanced Beacon Group is set up by the participating teams on their laptops, and they can set the corresponding IP address and port number for the server, with the following unified IP address and port number recommended:
● Balanced Beacon Group Server: IP Address: 192.168.0.111 Port Number: 1011
02 Intelligent Vision Group
Below is the implementation plan and rule supplements for the Intelligent Vision Group.
2.1 Competition Layout and Process
2.1.1 Intelligent Vision Group Competition Field
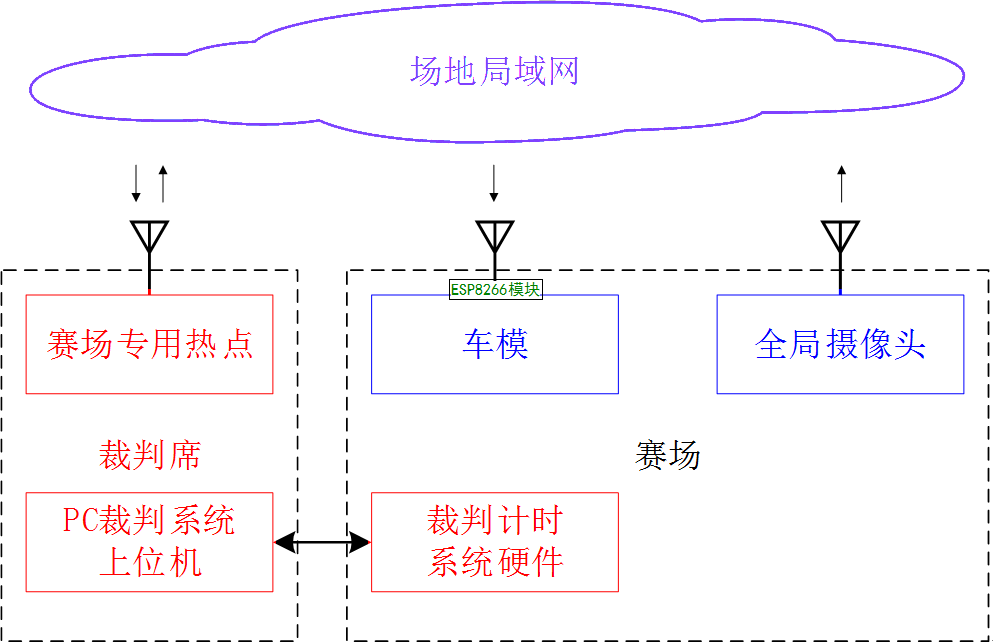
The newly added WiFi local area network communication data, based on the RT-Thread networking component framework, is structured as shown in the following diagram:
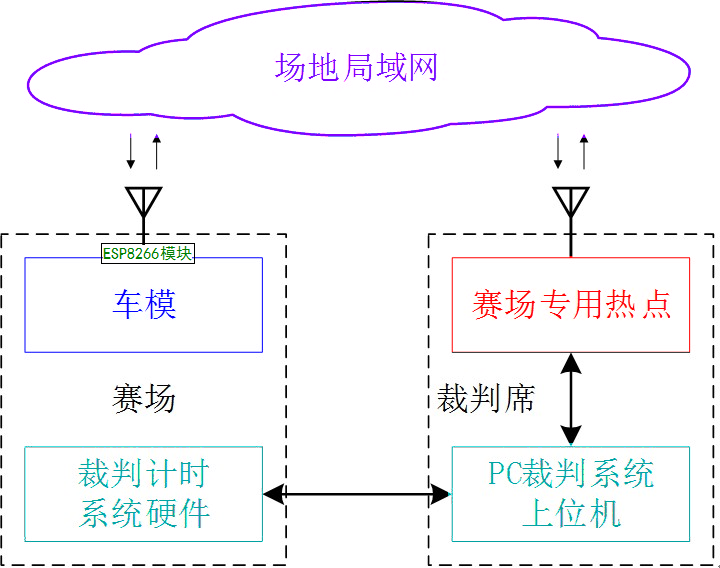
In the above diagram, the model car is made by the participating teams, while the other components are provided on-site by the organizing committee.
According to the 17th Intelligent Car Competition Intelligent Vision Group Competition Rules[1], the model car works must have a wireless module interface. Based on the now expanded plan, an additional data receiving (RX) port is added to the existing unidirectional sending interface (which has VCC, GND, TX three ports), forming a full-duplex wireless communication port. The model car can send and receive information through this port.
The communication module is based on the ESP8266, which will be uniformly provided by the organizing committee during the competition.
2.1.2 Competition and Communication Process
According to the published rules for the Intelligent Vision Group, model cars can obtain target location information within the venue through machine vision before the competition. They can also directly receive target location information on-site through the communication module.
According to the new local area network-based communication method,
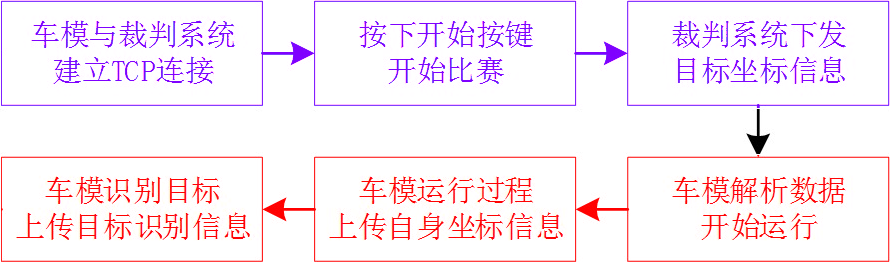
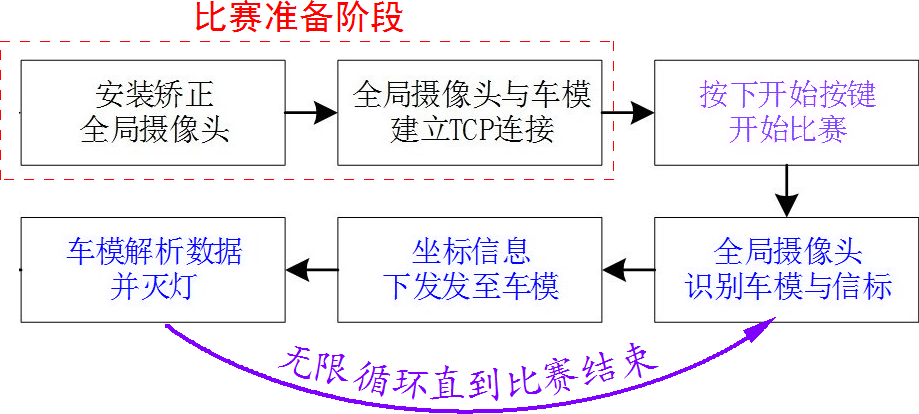
If based on the new local area network communication method, after pressing the start button, the model car software utilizes the networking function provided by RT-Thread RTOS, establishing a TCP connection with the referee’s upper computer through the communication hardware module, and then the upper computer will issue data to the model car from the local area network, allowing the model car to directly obtain the accurate coordinates of all targets on the competition field by parsing the target coordinate information sent by the referee system. For specific data standards, refer to the following Communication Data Format.
During the operation of the model car, it can directly upload its coordinates and identification information through the local area network, thus eliminating the need to use the originally specified sending interface, simply uploading its coordinates and the identified target information according to the specified data format.
During the competition, the organizing committee provides a dedicated ESP8266 module for local area network access.
2.2 Communication Data Format
2.2.1 Data Format
If the model car still adopts the already published standards of the vision group competition, it can use the communication module to send model car identification target information and operational information according to the previously published data standards. If planning to directly receive venue information and send location information through the module,
The communication data format will use the commonly used IOT standard data format (JSON format) for uploading and issuing.
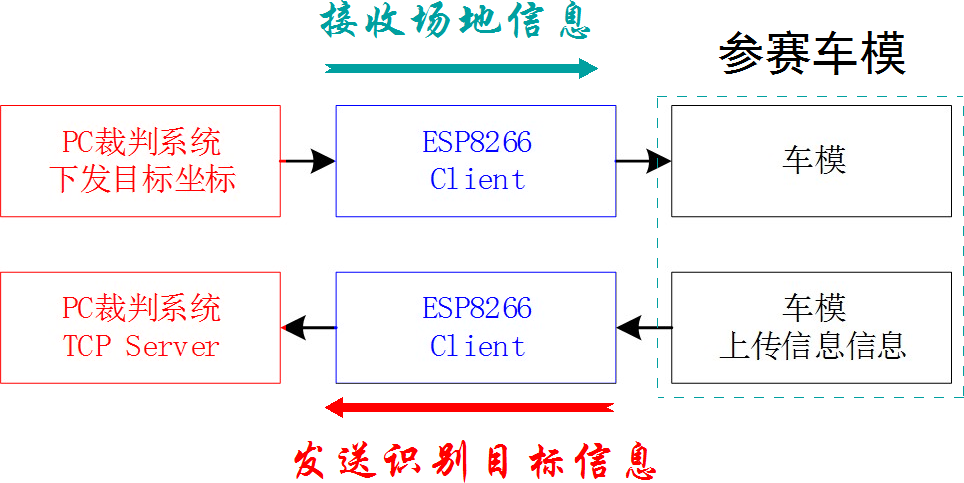
(1)Model Car Receiving Target Location Information
The target information sent to the model car by the referee system is shown in the code below.
A frame of target coordinate information contains two parts:
-
The first part contains the label “Origin”, followed by the data “Server” indicating that the data comes from the referee system; -
The second part is a data set, containing the label “Coordinate” representing target coordinate information, with the data depending on the number of targets in the venue.
{
"Origin": "Server",
"Coordinate": [{
"x": 1,
"y": 3
}, {
"x": 2,
"y": 5
}, {
"x": 6,
"y": 7
}]
}(2)Model Car Sending Location and Target Identification Information
Ⅰ. Model Car Location Information
The identification information sent by the model car to the referee system, containing its coordinate information in a frame of data, includes two parts:
-
The first part contains the label “Origin”, followed by the data “Car” indicating that the data comes from the model car; -
The second part is a data set, containing the label “Coordinate” representing its coordinate information.
{
"Origin": "Car",
"Coordinate": [{
"x": 0,
"y": 0
}]
}To prevent participating model cars from using the communication module to send additional control commands and other unwanted information through downlink data (data sent from the server to the model car), the communication module provided by the organizing committee will analyze the communication data. If anomalies are detected, they will be intercepted.
The coordinate data content includes the “x” identifier corresponding to the 7-meter edge of the competition field, and the “y” identifier corresponding to the 5-meter edge of the competition field. The horizontal coordinate value range is [0-35], and the vertical coordinate value range is [0-25]. If the data exceeds the specified range, it will be considered abnormal data and will be truncated by the ESP8266 module issued by the competition field.
Ⅱ. Target Identification Information
A frame of target identification information contains three parts:
-
The first part contains the label “Origin”, followed by the data “Car” indicating that the data comes from the model car; -
The second part contains the label “Class”, followed by the data “Animal” indicating the major category; -
The third part contains the label “Subclass”, followed by the data “Cat” indicating the minor category.
{
"Origin": "Car",
"Class": "Animal",
"Subclass": "Cat"
}-
The data range for the major category of targets is: [Animal, Fruits, Vehicle]; corresponding to [动物, 水果, 交通工具];
-
The data range for the minor category is:
-
[Dog, Horse, Cat, Cattle, Pig], corresponding to [狗, 马, 猫, 牛, 猪] -
[Orange, Apple, Durian, Grape, Banana], corresponding to [橙子, 苹果, 榴莲, 葡萄, 香蕉] -
[Train, Steamship, Plane, Car, Coach], corresponding to [火车, 轮船, 飞机, 小轿车, 大客车]
2.3 Communication Module Interface
Compatible with existing rules, it is possible to connect the officially issued wireless module through the already specified interface and upload data according to the existing data format. For details, see: Intelligent Vision Group – Recognition Result Sending[2].
2.3.1 Communication Interface Definition
To be compatible with the original rule interface, the newly expanded competition communication module adds a downlink data line. Teams using RT-Thread can use this interface to communicate with the ESP8266 module provided by the competition and send and receive JSON format data.
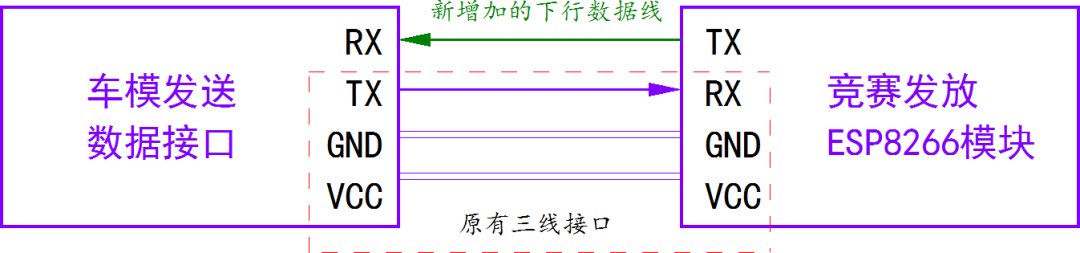
The physical definition of the communication interface has changed from the original 3-pin connector to a 4-pin connector.
2.3.2 Communication Information
If using the RT-Thread local area network access method to obtain target coordinate information, after completing the TCP connection with the referee system’s upper computer, the upper computer will issue accurate target coordinate information in the specified format through the local area network.
If not using the local area network to obtain target coordinate information, the original rules can still be used to identify images on A4 paper to obtain target coordinate information.
03 Balanced Beacon Group
Below is the implementation plan and rule supplements for the Balanced Beacon Group.
3.1 Competition Layout and Process
The layout of the competition venue does not affect the completion of the competition by model cars using traditional beacon competition technology schemes. The new rules only add a dedicated WiFi hotspot for the venue and allow participating teams to assume global cameras outside the venue for detecting the positions of model cars and beacons.
3.1.1 Beacon Group Competition Components
Participating teams can add a camera at the edge of the venue to identify the position of the model car and the beacon light, sending this information to the running model car via the WiFi local area network next to the venue, assisting the model car in completing the beacon extinguishing process.
The global camera, installation bracket, and laptop for processing camera images will be prepared by the participating teams, who will set up, debug, and connect them during the competition.
The ESP8266 module used in the competition will be uniformly provided by the organizing committee, and this module will filter the transmitted data (in JSON format), only allowing the transmission of location information that meets the requirements.
3.1.2 Competition and Communication Process
(1)Establishing Visual Server
During the competition, participating teams’ laptops connect to the dedicated venue hotspot and provide TCP communication services. The specific communication protocol is detailed in the following Data Communication Protocol.
The global camera server can be implemented by the participating teams through programming or connected through the specified interface to the ESP8266 module issued by the venue, using it normally. The data format is sent in the specified JSON format. The module needs to be set as a TCP Server, which can be conveniently implemented using the RT-Thread ESP8266 driver component along with the SAL socket abstraction layer.
(2)Model Car Connecting to Server
A dedicated ESP8266 module is provided on-site for model cars to connect to the venue WiFi and receive data.
The model car part uses the ESP8266 module issued by the venue, which can be used normally. By establishing a TCP connection with the global camera’s TCP Server using the ESP8266, data communication can be achieved between the model car and the global camera, allowing the global camera to send data that the model car can obtain and parse.
3.2 Data Format
The communication data format will use the commonly used IOT standard data format (JSON format) for issuing:
{
"Origin": "Camera",
"Light": [{
"x": 31,
"y": 47
}],
"Car": [{
"x": 23,
"y": 29
}]
}As shown in the code above, a frame of issued data contains three parts:
-
The first part contains the label “Origin”, followed by the data “Camera” indicating the data comes from the global camera; -
The second part is a data set containing the label “Light” representing beacon light coordinate information; -
The third part is a data set containing the label “Car” representing model car coordinate information.
The coordinate data content includes the “x” identifier corresponding to the 7-meter edge of the competition field, and the “y” identifier corresponding to the 5-meter edge of the competition field. The horizontal coordinate value range is [0-140], and the vertical coordinate value range is [0-100], corresponding to the highest coordinate accuracy of 5cm. If the data exceeds the specified range, it will be considered abnormal data and will be truncated by the ESP8266 module issued by the competition field.
※ Conclusion ※
This article provides supplementary rules for the use of WiFi communication modules to assist model car operations in the Intelligent Vision Group and Balanced Beacon Group competitions, aiming to allow participating teams broader exploration in areas such as vehicle-road collaboration and edge-cloud computing, guiding students to become familiar with the domestic embedded operating system RT-Thread and to build application experience, laying the foundation for constructing complex unmanned systems.
This content is a draft proposal, and the official document will be published on the competition website.
-
National College Student Intelligent Car Competition Website: <smartcar.cdstm.cn>
References
17th Intelligent Car Competition Intelligent Vision Group Competition Rules: https://blog.csdn.net/zhuoqingjoking97298/article/details/121438560
[2]Intelligent Vision Group – Recognition Result Sending: https://blog.csdn.net/zhuoqingjoking97298/article/details/121438560#t15