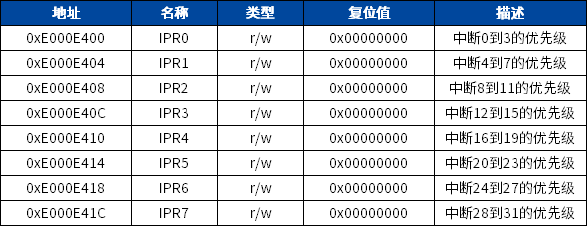
Each external interrupt has a corresponding priority register. The Cortex-M0 has a total of 8 NVIC-IPR registers, with each register managing 4 IRQ interrupts. Therefore, the M0 supports a maximum of 32 IRQ interrupt sources, plus 16 core interrupts, which means the M0 can handle up to 48 interrupt sources.
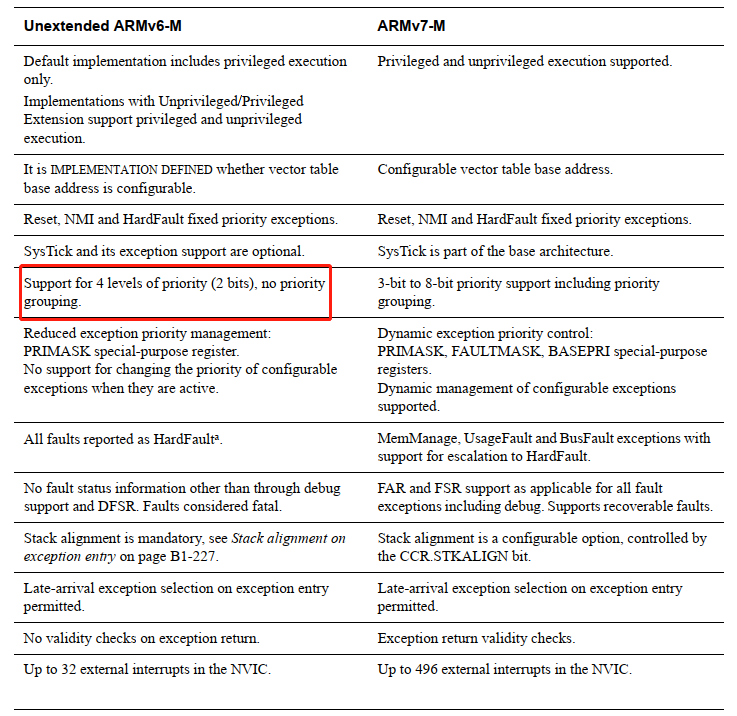
The Cortex-M0 adopts the Armv6-M architecture, with the priority register configuration bits being 8 bits, but only the highest 2 bits are effective. Many people who have used the Cortex-M3 mistakenly believe that the Cortex-M0 also has 3 or 4 effective bits. The official Arm documentation compares the differences between the two versions. Therefore, the Cortex-M0 has 4 programmable priority levels, plus 3 fixed priority levels (Reset, NMI, HardFault), giving a total of 7 interrupt priority levels.
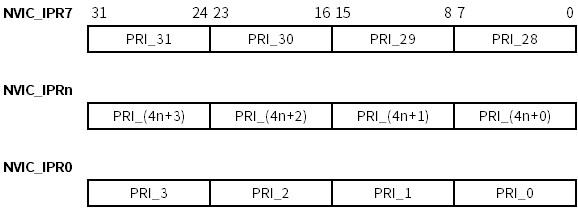
The interrupt priority register of the Cortex-M0 core is aligned with the most significant bit (MSB) and supports only word transfers. Each access involves 4 interrupt priority registers simultaneously. See the figure below:

Since Bit0 – Bit5 are not used, if no write operation is performed, the readout will be 0.
Due to the differences in interrupt priorities across different Cortex-M series, the number of priorities can be checked in the header files of the CMSIS library using __NVIC_PRIO_BITS.
Programming the interrupt priority registers should be done before enabling the interrupts, which is typically completed at the start of the program. The official Arm documentation suggests avoiding changes to interrupt priorities after enabling interrupts, as the results in the ARMv6-M system architecture are unpredictable and not supported by the Cortex-M0 processor. The situations for Cortex-M3/M4 processors are different, as they support dynamic switching of interrupt priorities. Another difference between the Cortex-M3 and Cortex-M0 processors is that the Cortex-M3 supports byte or half-word transfers when accessing the interrupt priority registers, allowing only one register to be set at a time. If a priority change is needed, the program must disable the interrupt before resetting the interrupt priority register.
In the Cortex-M core, the lower the priority value of an interrupt, the higher its logical priority. For example, an interrupt with a priority of 2 can preempt an interrupt with a priority of 3, but not vice versa. In other words, interrupt priority 2 is higher than interrupt priority 3.
The Cortex-M0 processor supports interrupt nesting without any software intervention. If the MCU is already running an interrupt and a new higher-priority interrupt request occurs, the running interrupt will be paused, and the higher-priority interrupt will be executed. After the higher-priority interrupt finishes, it will return to the original lower-priority interrupt. If two interrupts of the same priority occur, the MCU will execute the interrupt that first initiated the request.
Interrupt vector table for the MM32F0130 series:
typedef enum IRQn {
NonMaskableInt_IRQn = -14, ///< 2 Non Maskable Interrupt
HardFault_IRQn = -13, ///< 3 Cortex-M0 Hard Fault Interrupt
MemoryManagement_IRQn = -12, ///< 4 Cortex-M0 Memory Management Interrupt
BusFault_IRQn = -11, ///< 5 Cortex-M0 Bus Fault Interrupt
UsageFault_IRQn = -10, ///< 6 Cortex-M0 Usage Fault Interrupt
SVC_IRQn = -5, ///< 11 Cortex-M0 SV Call Interrupt
DebugMonitor_IRQn = -4, ///< 12 Cortex-M0 Debug Monitor Interrupt
PendSV_IRQn = -2, ///< 14 Cortex-M0 Pend SV Interrupt
SysTick_IRQn = -1, ///< 15 Cortex-M0 System Tick Interrupt
WWDG_IWDG_IRQn = 0, ///< WatchDog Interrupt
WWDG_IRQn = 0, ///< Window WatchDog Interrupt
PVD_IRQn = 1, ///< PVD through EXTI Line detect Interrupt
BKP_IRQn = 2, ///< BKP through EXTI Line Interrupt
RTC_IRQn = 2, ///< RTC through EXTI Line Interrupt
FLASH_IRQn = 3, ///< FLASH Interrupt
RCC_CRS_IRQn = 4, ///< RCC & CRS Interrupt
RCC_IRQn = 4, ///< RCC Interrupt
EXTI0_1_IRQn = 5, ///< EXTI Line 0 and 1 Interrupts
EXTI2_3_IRQn = 6, ///< EXTI Line 2 and 3 Interrupts
EXTI4_15_IRQn = 7, ///< EXTI Line 4 to 15 Interrupts
HWDIV_IRQn = 8, ///< HWDIV Global Interrupt
DMA1_Channel1_IRQn = 9, ///< DMA1 Channel 1 Interrupt
DMA1_Channel2_3_IRQn = 10, ///< DMA1 Channel 2 and Channel 3 Interrupts
DMA1_Channel4_5_IRQn = 11, ///< DMA1 Channel 4 and Channel 5 Interrupts
ADC_COMP_IRQn = 12, ///< ADC & COMP Interrupts
COMP_IRQn = 12, ///< COMP Interrupts
ADC_IRQn = 12, ///< ADC Interrupts
ADC1_IRQn = 12, ///< ADC Interrupts
TIM1_BRK_UP_TRG_COM_IRQn = 13, ///< TIM1 Break, Update, Trigger and Commutation Interrupts
TIM1_CC_IRQn = 14, ///< TIM1 Capture Compare Interrupt
TIM2_IRQn = 15, ///< TIM2 Interrupt
TIM3_IRQn = 16, ///< TIM3 Interrupt
TIM14_IRQn = 19, ///< TIM14 Interrupt
TIM16_IRQn = 21, ///< TIM16 Interrupt
TIM17_IRQn = 22, ///< TIM17 Interrupt
I2C1_IRQn = 23, ///< I2C1 Interrupt
SPI1_IRQn = 25, ///< SPI1 Interrupt
SPI2_IRQn = 26, ///< SPI1 Interrupt
UART1_IRQn = 27, ///< UART1 Interrupt
UART2_IRQn = 28, ///< UART2 Interrupt
CAN_IRQn = 30, ///< CAN Interrupt
USB_IRQn = 31, ///< USB Interrupt
} IRQn_Type;
The process for setting interrupt priorities: first read a word, then modify the corresponding byte, and finally write the entire word back.
1.1 C Code
void __NVIC_SetPriority()
{
unsigned long temp; // Define a temporary variable
temp = *(volatile unsigned long)(0xE000E400); // Read IRP0 value
temp &= (0xFF00FFFF |(0xC0 << 16)); // Modify interrupt #2 priority to 0xC0
*(volatile unsigned long)(0xE000E400) = temp; // Set IPR0
}
1.2 Assembly Code
In the program, multiple interrupt priorities can be set at once.
void __NVIC_SetPriority()
{
LDR R0, =0xE000E100 ; // Set the address of the enable interrupt register
MOVS R1, #0x4 ; // Interrupt #2
STR R1, [R0] ; // Enable #2 interrupt
LDR R0, =0xE000E200 ; // Set the address of the pending interrupt register
MOVS R1, #0x4 ; // Interrupt #2
STR R1, [R0] ; // Set pending #2 interrupt
LDR R0, =0xE000E280 ; // Set the address of the clear pending interrupt register
MOVS R1, #0x4 ; // Interrupt #2
STR R1, [R0] ; // Clear #2 pending state
}
1.3 CMSIS Standard Device Driver Function
// Set interrupt priority
__STATIC_INLINE void __NVIC_SetPriority(IRQn_Type IRQn, uint32_t priority)
{
if ((int32_t)(IRQn) >= 0) {
NVIC->IP[_IP_IDX(IRQn)] = ((uint32_t)(NVIC->IP[_IP_IDX(IRQn)] & ~(0xFFUL << _BIT_SHIFT(IRQn))) |
(((priority << (8U - __NVIC_PRIO_BITS)) & (uint32_t)0xFFUL) << _BIT_SHIFT(IRQn)));
}
else {
SCB->SHP[_SHP_IDX(IRQn)] = ((uint32_t)(SCB->SHP[_SHP_IDX(IRQn)] & ~(0xFFUL << _BIT_SHIFT(IRQn))) |
(((priority << (8U - __NVIC_PRIO_BITS)) & (uint32_t)0xFFUL) << _BIT_SHIFT(IRQn)));
}
}
The parameter IRQn here is the interrupt ID number, which can be negative or positive. When IRQn is negative, the priority of system exceptions is set. When IRQn is greater than or equal to 0, the priority of peripheral interrupts is set. Chip manufacturers will provide the interrupt vector table IRQn_Type, and the application layer only needs to call it; priority can be 0, 1, 2, or 3, and the function will automatically shift to the corresponding highest 2 bits.
Method 1:
void NVIC_SetPriority(TIM1_CC_IRQn, 3) ; // Set the priority of interrupt #14 to 0xC0
Method 2:
void NVIC_Config(void)
{ NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = TIM1_CC_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPriority = 3;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
After setting the interrupt priority, users can also read the currently set interrupt priority.
Recommended Reading
Technical Sharing | Cortex-M0 Interrupt Control and System Control (Part 1)
Copyright belongs to the original author. If there is any infringement, please contact for deletion.
END
About Anxin Education
Anxin Education is an innovative education platform focused on AIoT (Artificial Intelligence + Internet of Things), providing a comprehensive AIoT education solution from primary and secondary schools to higher education.
Anxin Education relies on Arm technology to develop the ASC (Arm Smart Connectivity) curriculum and talent training system, which has been widely applied in industry-university-research cooperation in higher education and STEM education in primary and secondary schools, aiming to cultivate talents in the intelligent connectivity field that meet the needs of the times.