Author: Paul Veradittakit, Partner at Pantera Capital; Translation: Jinse Finance Xiaozou
Abstract:
The innovation and economies of scale in VLA are driving the emergence of affordable, efficient, and versatile humanoid robots.
As warehouse robots expand into the consumer robot market, the safety, financing, and evaluation mechanisms of robots deserve in-depth exploration.
Cryptographic technology will promote the development of the robotics industry by providing economic guarantees for robot safety and optimizing their docking infrastructure, latency, and data collection processes.
ChatGPT has fundamentally rewritten human expectations of artificial intelligence. When large language models began to interact with the external software world, many believed that AI agents represented the ultimate form. However, looking back at classic sci-fi films like “Star Wars,” “Blade Runner,” or “RoboCop,” it becomes clear that what humanity truly dreams of is AI interacting with the physical world in the form of robots.
According to Pantera Capital, the “ChatGPT moment” in the robotics field is approaching. We will first analyze how breakthroughs in artificial intelligence over the past few years have changed the industry landscape, then discuss how battery technology, latency optimization, and data collection improvements will shape the future, and the role that cryptographic technology will play in this. Finally, we will explain why we believe that robot safety, financing, evaluation, and education are vertical fields that require focused attention.
1Elements of Transformation
(1) Breakthroughs in Artificial Intelligence
Advancements in multimodal large language models are providing robots with the “brains” needed to perform complex tasks. Robots primarily perceive their environment through two senses: vision and hearing.
Traditional computer vision models (such as convolutional neural networks) excel at object detection or classification tasks but struggle to translate visual information into purposeful action commands. While large language models perform excellently in text understanding and generation, they are limited in their ability to perceive the physical world.
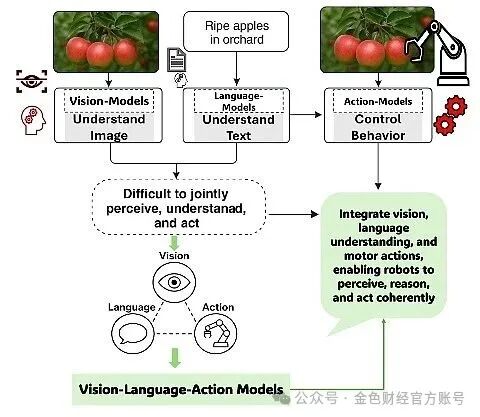
Through the Vision-Language-Action (VLA) model, robots can integrate visual perception, language understanding, and physical action within a unified computational framework. In February 2025, Figure AI released the Helix, a universal humanoid robot control model, which sets a new benchmark for the industry with its zero-shot generalization capability and dual architecture of System 1/System 2. The zero-shot generalization feature allows robots to adapt to new scenes, objects, and commands instantly without the need for repeated training for each task. The System 1/System 2 architecture separates high-level reasoning from lightweight reasoning, achieving a commercial humanoid robot that combines human-like thinking with real-time precision.
(2) Affordable Robots Become a Reality
Transformative technologies share a common characteristic: accessibility. Smartphones, personal computers, and 3D printing technologies have all achieved widespread adoption at prices affordable to the middle class. When robots like the Unitree G1 are priced below a Honda Accord or the U.S. minimum annual income of $34,000, it is not surprising to envision a world where physical labor and daily tasks are primarily handled by robots.

(3) From Warehousing to Consumer Market
Robotic technology is expanding from warehouse solutions to consumer applications. This world is designed for humans—humans can perform all the tasks of specialized robots, while specialized robots cannot perform all human tasks. Robotics companies are no longer limited to manufacturing robots for factories but are developing more versatile humanoid robots. Therefore, the forefront of robotic technology is not only in warehouses but will also permeate daily life.
Cost is one of the main bottlenecks for scalability. The metric we focus on most is the comprehensive cost per hour, calculated as the sum of the opportunity cost of training and charging time, task execution costs, and the cost of purchasing the robot, divided by the total operating hours of the robot. This cost must be below the average wage level of the relevant industry to be competitive.
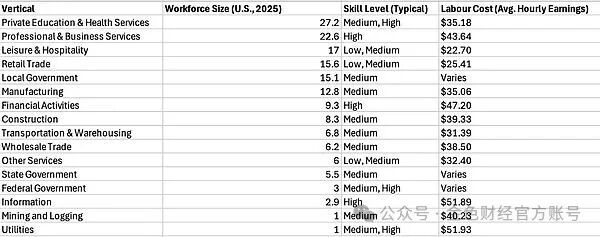
To fully penetrate the warehousing sector, the comprehensive cost per hour for robots must be below $31.39. In the largest consumer market—private education and health services—this cost must be controlled below $35.18. Currently, robots are moving towards being cheaper, more efficient, and more versatile.
2Next Breakthroughs in Robotics Technology
(1) Battery Optimization
Battery technology has always been a bottleneck for user-friendly robots. Early electric vehicles like the BMW i3 faced limitations due to battery technology, resulting in short range, high costs, and low practicality, which hindered widespread adoption. Robots are facing the same dilemma. Boston Dynamics’ Spot robot has a single charge endurance of only 90 minutes, while the Unitree G1 has a battery life of about 2 hours. Users are clearly unwilling to manually charge every two hours, so autonomous charging and docking infrastructure have become key development directions. Currently, there are two main modes of robot charging: battery replacement or direct charging.
The battery replacement mode allows for continuous operation by quickly swapping out depleted battery packs, minimizing downtime, and is suitable for outdoor or factory scenarios. This process can be performed manually or automated.
Inductive charging uses wireless power supply methods, which, although taking longer to fully charge, can easily achieve fully automated processes.
(2) Latency Optimization
Low-latency operations can be divided into environmental perception and remote control. Perception refers to the robot’s spatial awareness of the environment, while remote control specifically refers to real-time control by human operators.
According to research by Cintrini, robotic perception systems start with inexpensive sensors, but the technological moat lies in fusion software, low-power computing, and millisecond-level precision control loops. Once the robot completes spatial localization, lightweight neural networks will label elements such as obstacles, pallets, or humans. After scene labels are input into the planning system, motor commands are generated and sent to the feet, wheels, or robotic arms.Perception latency below 50 milliseconds is equivalent to human reflex speed—any latency exceeding this threshold will result in clumsy robot movements. Therefore, 90% of decisions must be made locally through a single vision-language-action network.
Fully autonomous robots must ensure that high-performance VLA models have latencies below 50 milliseconds; remote-controlled robots require that the signal latency between the control end and the robot does not exceed 50 milliseconds. The importance of the VLA model is particularly highlighted here—if visual and text inputs are processed by different models before being input into a large language model, the overall latency will far exceed the 50 milliseconds threshold.
(3) Data Collection Optimization
Data collection mainly has three avenues: real-world video data, synthetic data, and remote control data. The core bottleneck between real data and synthetic data lies in bridging the gap between robotic physical behavior and video/simulation models.Real video data lacks physical details such as force feedback, joint motion errors, and material deformation; synthetic data, on the other hand, lacks unpredictable variables such as sensor failures and friction coefficients.
The most promising data collection method is remote control—where human operators remotely control robots to perform tasks. However, labor costs are the main constraint for remote control data collection.
Custom hardware development is also providing new solutions for high-quality data collection. Mecka combines mainstream methods with custom hardware to collect multidimensional human motion data, which is processed into datasets suitable for training robotic neural networks, providing massive high-quality data for AI robot training with rapid iteration cycles. These technological pipelines collectively shorten the conversion path from raw data to deployable robots.
3Key Areas of Exploration
(1) Integration of Cryptographic Technology and Robotics
Cryptographic technology can incentivize trustless parties to enhance the efficiency of robotic networks. Based on the key areas mentioned earlier, we believe that cryptographic technology can improve efficiency in docking infrastructure, latency optimization, and data collection.
The decentralized physical infrastructure network (DePIN) is expected to revolutionize charging infrastructure. As humanoid robots operate globally like cars, charging stations need to be as accessible as gas stations. Centralized networks require massive upfront investments, while DePIN distributes costs among node operators, allowing charging facilities to expand rapidly to more areas.
DePIN can also optimize remote control latency using distributed infrastructure. By aggregating geographically dispersed edge node computing resources, remote control commands can be processed by local or nearest available nodes, minimizing data transmission distances and significantly reducing communication latency. However, current DePIN projects mainly focus on decentralized storage, content distribution, and bandwidth sharing. While some projects demonstrate the advantages of edge computing in streaming media or IoT, they have yet to extend to robotics or remote control fields.
Remote control is the most promising data collection method, but centralized entities hiring professionals to collect data incur high costs. DePIN addresses this issue by incentivizing third parties to provide remote control data through cryptographic tokens. The Reborn project builds a global network of remote operators, converting their contributions into tokenized digital assets, forming a permissionless decentralized system—participants can earn rewards while participating in governance and aiding AGI robot training.
(2) Safety Remains a Core Concern
The ultimate goal of robotic technology is to achieve full autonomy, but as the “Terminator” series of films warns, humanity is most reluctant to see autonomy turn robots into offensive weapons. The safety issues of large language models have already raised concerns, and when these models possess physical action capabilities, robot safety becomes a key prerequisite for societal acceptance.
Economic security is one of the pillars of a thriving robotics ecosystem. OpenMind is building FABRIC—a decentralized machine coordination layer that achieves device identity authentication, physical presence verification, and resource acquisition through cryptographic proofs. Unlike simple task market management, FABRIC enables robots to autonomously prove identity information, geographic location, and behavior records without relying on centralized intermediaries.
Behavioral constraints and identity authentication are executed through on-chain mechanisms, ensuring that anyone can audit compliance. Robots that meet safety standards, quality requirements, and regional regulations will be rewarded, while violators will face penalties or disqualification, thereby establishing accountability and trust mechanisms within autonomous machine networks.
The third-party re-staking network (such as Symbiotic) can also provide peer-to-peer security guarantees. Although the penalty parameter system still needs improvement, the relevant technology has entered the practical stage. We expect industry safety standards to soon take shape, at which point penalty parameters will be modeled according to these standards.
Example implementation plan:
Robotics companies join the Symbiotic network.
Set verifiable penalty parameters (e.g., “applying more than 2500 Newtons of human contact force”);
Stakers provide collateral to ensure robots comply with parameters;
If violations occur, the collateral will serve as compensation for the victim.
This model incentivizes companies to prioritize safety while promoting consumer acceptance through the insurance mechanism of the staking fund pool.
The Symbiotic team’s insights into the robotics field are:
The Symbiotic universal staking framework aims to extend the concept of staking to all areas requiring economic security endorsement, whether through shared or independent models. Its application scenarios range from insurance to robotics technology and require specific case designs. For example, a robotics network could be entirely built on the Symbiotic framework, allowing stakeholders to provide economic guarantees for network integrity.
4Filling the Gaps in the Robotics Technology Stack
OpenAI has driven the popularization of AI, but the foundation for the ChatGPT moment has long been laid. Cloud services have broken the dependency of models on local computing power, Huggingface has achieved model open-sourcing, and Kaggle provides a testing platform for AI engineers. These incremental breakthroughs have collectively contributed to the democratization of AI.
Unlike AI, the robotics field is difficult to enter with limited funding. To achieve widespread adoption of robots, the development threshold must be lowered to the convenience level of AI application development. We believe there is room for improvement in three areas: financing mechanisms, evaluation systems, and educational ecosystems.
Financing is a pain point in the robotics field. Developing computer programs requires only a computer and cloud computing resources, while building a fully functional robot necessitates purchasing hardware such as motors, sensors, and batteries, with costs easily exceeding $100,000. This hardware nature makes robot development less flexible and more costly compared to AI.
The evaluation infrastructure for robots in real-world scenarios is still in its infancy. The AI field has established a clear loss function system, and testing can be fully virtualized. However, excellent virtual strategies cannot be directly translated into effective solutions in the real world. Robots need evaluation facilities to test autonomous strategies in diverse real-world environments to achieve iterative optimization.
Once these infrastructures mature, talent will flood in, and humanoid robots will replicate the explosive growth curve of Web2. The cryptographic robotics company OpenMind is advancing in this direction—its open-source project OM1 (“Android for Robots”) transforms raw hardware into economically aware, upgradable agents. Vision, language, and motion planning modules can be plug-and-play like mobile applications, with all reasoning steps presented in plain English, allowing operators to audit or adjust behaviors without touching the firmware. This natural language reasoning capability enables a new generation of talent to seamlessly enter the robotics field, marking a key step towards an open platform that ignites the robotics revolution, just as the open-source movement accelerated AI.

The density of talent determines the trajectory of the industry. A structured, inclusive education system is crucial for talent supply in the robotics field. OpenMind’s listing on NASDAQ marks the beginning of a new era where intelligent machines simultaneously participate in financial innovation and real-world education.OpenMind and Robostore jointly announced the launch of the first universal education curriculum based on the Unitree G1 humanoid robot in U.S. K-12 public schools. This curriculum is designed to be platform-agnostic, adaptable to various robot forms, and provides students with practical operational opportunities. This positive signal reinforces our judgment: In the coming years, the richness of educational resources in robotics will rival that of the AI field.
5Future Outlook
The innovation of the Vision-Language-Action (VLA) model and the economies of scale have already spawned affordable, efficient, and versatile humanoid robots. As warehouse robots expand into the consumer market, safety, financing models, and evaluation systems become key areas of exploration. We firmly believe that cryptographic technology will promote robot development through three pathways: providing economic guarantees for safety, optimizing charging infrastructure, and enhancing latency performance and data collection pipelines.