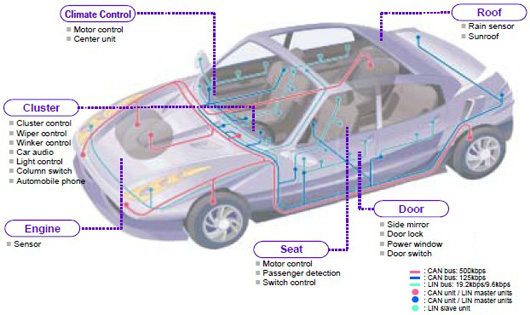
Examples of CAN Applications
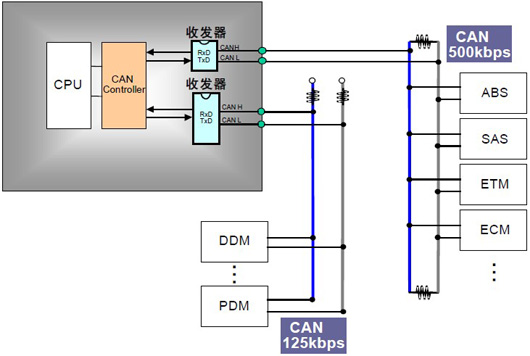
The CAN controller determines the bus level based on the potential difference on the two wires. The bus level is divided into dominant and recessive levels, one of which must be present. The sender sends messages to the receiver by changing the bus level.
Connection diagram of CAN
CAN protocol has the following features:
When the bus is idle, all units can start sending messages (multi-master control).
The unit that first accesses the bus can obtain the right to send (CSMA/CA method).
When multiple units start sending simultaneously, the unit sending the higher priority ID message can obtain the right to send.
In the CAN protocol, all messages are sent in a fixed format. When the bus is idle, all units connected to the bus can start sending new messages. When two or more units start sending messages simultaneously, priority is determined based on the identifier (hereinafter referred to as ID). The ID does not represent the destination address of the message but indicates the priority of the message accessing the bus. When two or more units start sending messages simultaneously, each bit of the message ID is compared one by one for arbitration. The unit that wins arbitration (determined to have the highest priority) can continue to send the message, while the unit that loses arbitration immediately stops sending and begins receiving.
Units connected to the bus do not have information similar to an “address“. Therefore, when adding units to the bus, the software and hardware of other units connected to the bus do not need to change.
The appropriate communication speed can be set based on the size of the entire network.
In the same network, all units must be set to a uniform communication speed. Even if one unit’s communication speed differs from others, that unit will output error signals, hindering the communication of the entire network. Different networks can have different communication speeds.
Data can be requested from other units by sending a “Remote Frame” request.
(6) Error Detection Function·Error Notification Function·Error Recovery Function
All units can detect errors (error detection function).
Units that detect errors will immediately notify all other units (error notification function).
When a unit that is sending a message detects an error, it will forcibly terminate the current transmission. The unit that forced the termination will continuously resend the message until successful (error recovery function).
CAN can determine whether the type of error is a temporary data error on the bus (such as external noise) or a persistent data error (such as internal unit failure, driver failure, disconnection, etc.). With this function, when a persistent data error occurs on the bus, the unit causing the fault can be isolated from the bus.
CAN bus can connect multiple units simultaneously. The theoretical number of connectable units is unlimited. However, the actual number of connectable units is limited by the time delay and electrical load on the bus. Reducing the communication speed increases the number of connectable units; increasing the communication speed decreases the number of connectable units.
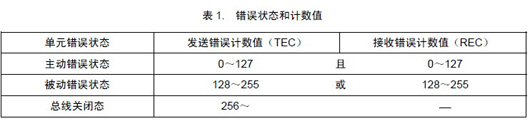
Types of CAN Error States
Units are always in one of the 3 states.
The active error state is a state that can normally participate in bus communication.
Units in the active error state will output an active error flag when they detect an error.
The passive error state is a state prone to errors.
Units in the passive error state can participate in bus communication, but to avoid interfering with other units’ communication, they cannot actively send error notifications during reception.
Units in the passive error state, even if they detect an error, if other units in the active error state do not find an error, the entire bus is considered error-free.
Units in the passive error state will output a passive error flag when they detect an error.
Additionally, units in the passive error state cannot immediately start sending again after sending ends. Before starting the next transmission, they must insert a “Delay Transmission” (8 bit implicit bits) during the inter-frame period.
The bus off state is a state that cannot participate in bus communication.
Both receiving and sending of information are prohibited.
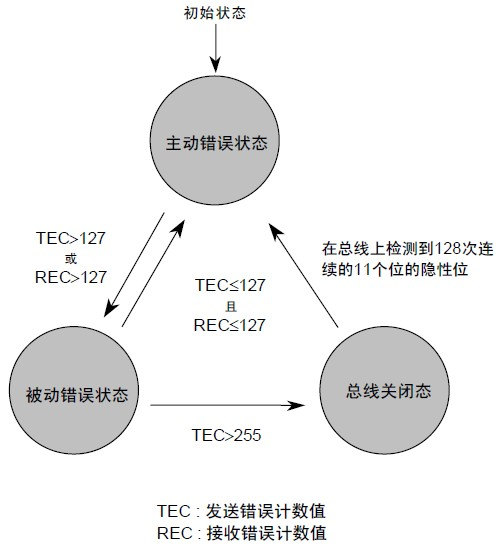
These states are managed by sending error counts and receiving error counts, determining which state to enter based on the count values. The relationship between error states and count values is shown in Table1 and the figure.
Figure: Error States of Units
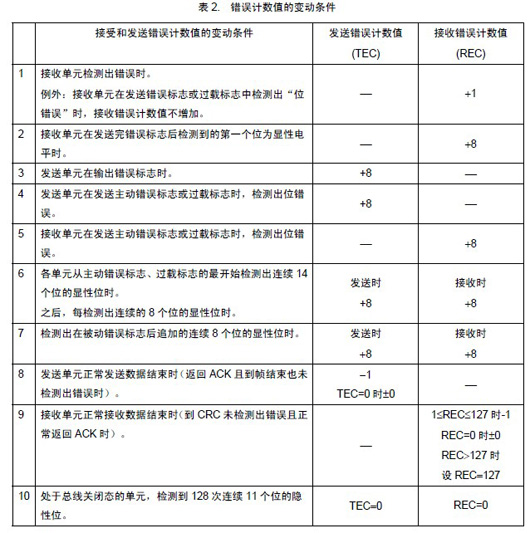
The sending error count value and receiving error count value change under certain conditions.
The conditions for the change of error count values are shown in Table 2 below.
Receiving and sending of a single data may simultaneously meet multiple conditions.
The error counter starts counting at the time the first bit of the error flag appears.
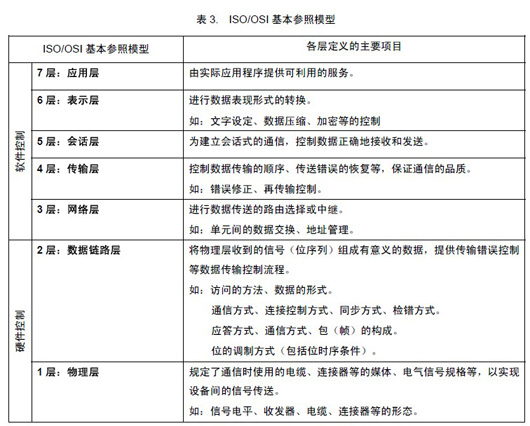
Basic Reference Model of CAN Protocol
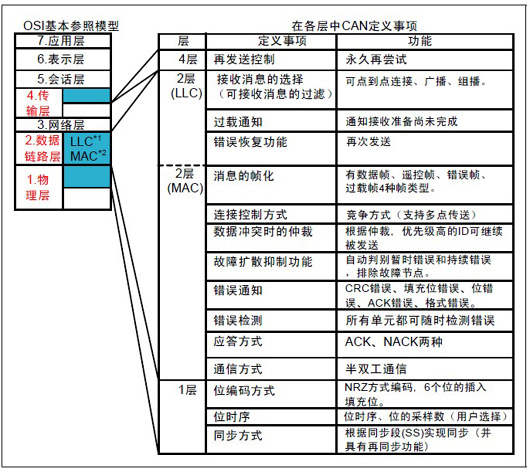
The CAN protocol, as shown in Table 3 covers the ISO defined OSI basic reference model’s transport layer, data link layer, and physical layer. The CAN protocol regarding ISO/OSI basic reference model’s transport layer, data link layer, and physical layer, specifically what
Figure: ISO/OSI Basic Reference Model and CAN Protocol
The data link layer is divided into MAC sub-layer and LLC sub-layer, MAC sub-layer is CAN protocol’s core part. The function of the data link layer is to organize the signals received from the physical layer into meaningful messages and provide transmission control processes such as error control. Specifically, it involves framing the message, arbitration, acknowledgment, and error detection or reporting. The functions of the data link layer are typically executed in the hardware of the CAN controller. In the physical layer, the actual method of sending signals, bit timing, bit encoding method, and synchronization steps are defined. However, specifically, signal levels, communication speeds, sampling points, driver and bus electrical characteristics, and connector forms are not defined. These must be determined by the user based on system requirements.
ISO Standardized CAN Protocol
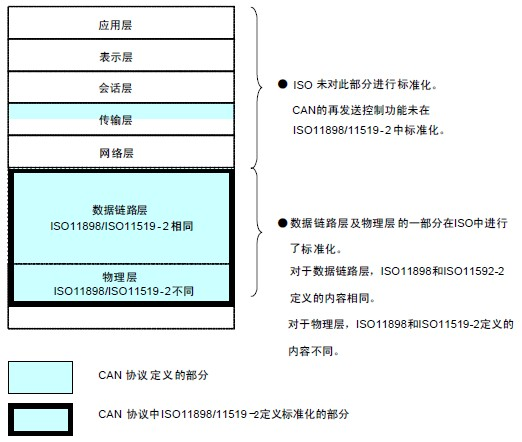
The CAN protocol has ISO standardization with ISO11898 standard and ISO11519-2 standard. The ISO11898 and ISO11519-2 standards have the same definition for the data
link layer, but the physical layer is different.
ISO11898 is a CAN high-speed communication standard with a communication speed of 125kbps-1Mbps . Currently, ISO11898 has become the new standard ISO11898-1 after adding new regulations.
ISO11519 is a CAN low-speed communication standard with a communication speed of below 125kbps.
ISO11519-2 is the version after adding new regulations to ISO11519-1.
The following figure represents the CAN protocol and ISO11898 and ISO11519-2 standards’ scope.
Figure: ISO Standardized CAN Protocol
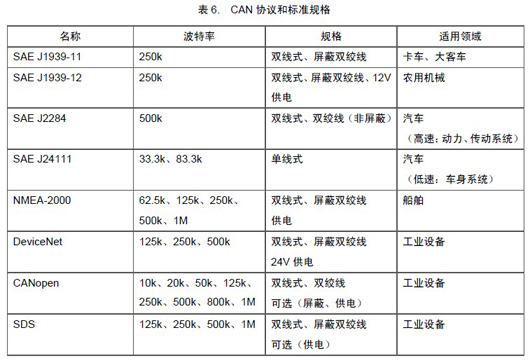
CAN and Standard Specifications
Not only ISO, but also other organizations, groups, and enterprises such as SAE have standardized the CAN protocol.
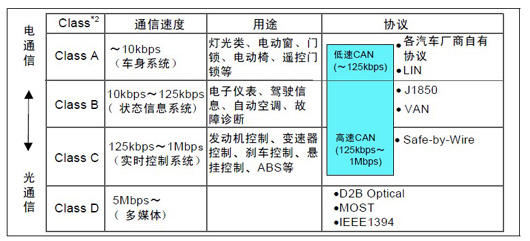
Various standards based on CAN are shown in Table 6 below, as shown in the figure, automotive communication protocols are classified based on communication speed.
Figure: Classification of Communication Protocols
(Images and text sourced from the internet)
Click the mini program below to see more repair cases