The following is a MATLAB-based simulation example of a Fractional Order PID (FOPID) control, utilizing MATLAB’s Simulink tool and the FOMCON toolbox:
System Model
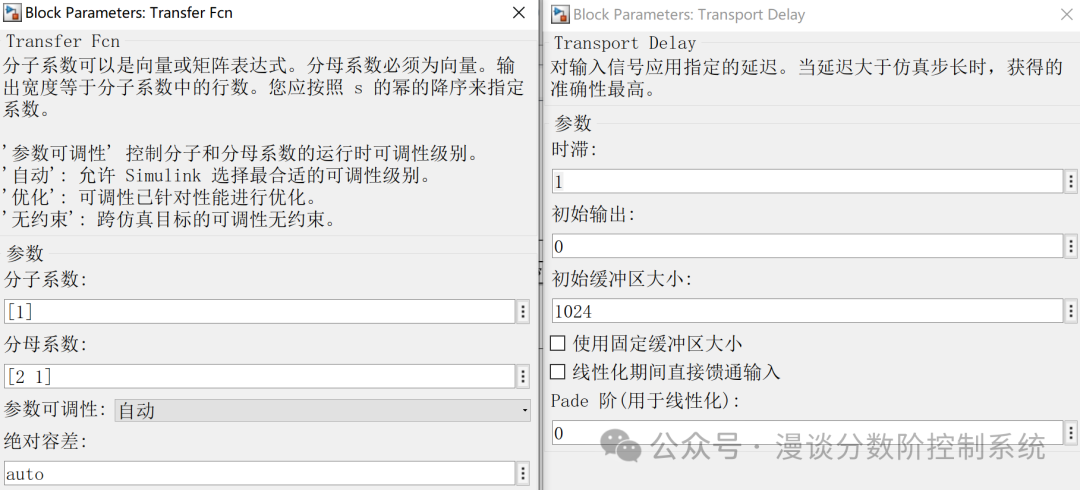
Assume the controlled object is a first-order inertia link with pure delay (FOPDT) model:
Where, , , .
Fractional Order PID Controller Design
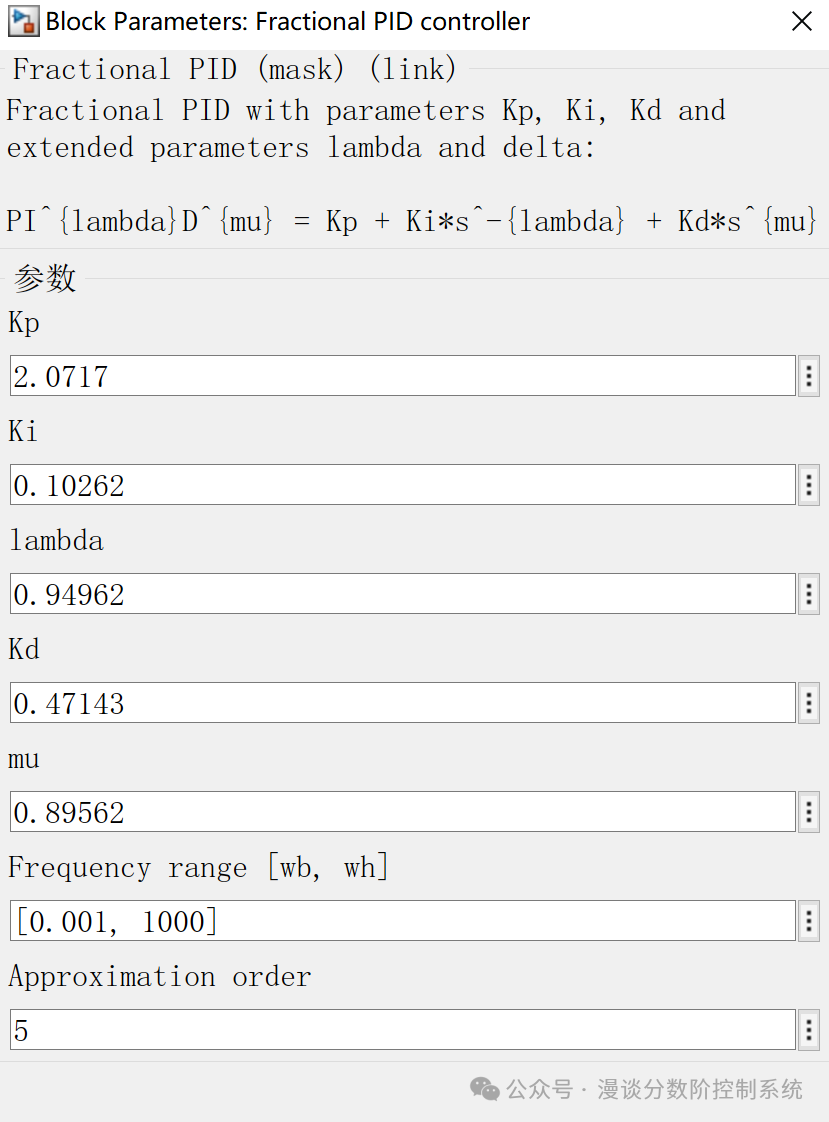
The form of the fractional order PID controller is:
Where, , and are the proportional, integral, and derivative gains, respectively, and and are the fractional order indices.
Parameter Settings
Adjust the controller parameters through optimization methods (such as genetic algorithms or particle swarm optimization) or empirical methods. Assume the optimized parameters are:
MATLAB/Simulink Simulation
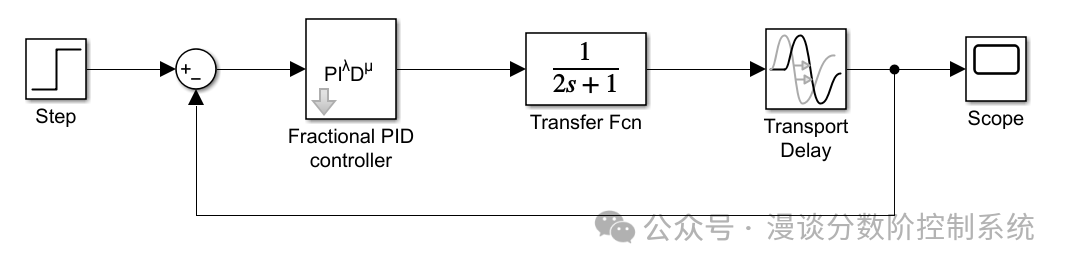
- Create Simulink Model:
- Create a new model in Simulink.
- Implement the fractional order PID controller using the “Fractional PID controller” module from the FOMCON toolbox.
- Add the controlled object in transfer function form to the model.
- Add a step signal source as input, and a scope to observe the system output.
- Simulation Settings:
- Set the simulation time (e.g., 10 seconds).
- Set the controller parameters and the parameters of the controlled object.
3. Run the simulation:
- Start the simulation and observe the system output and control signals.
- Record the system performance metrics, such as rise time, overshoot, settling time, etc.
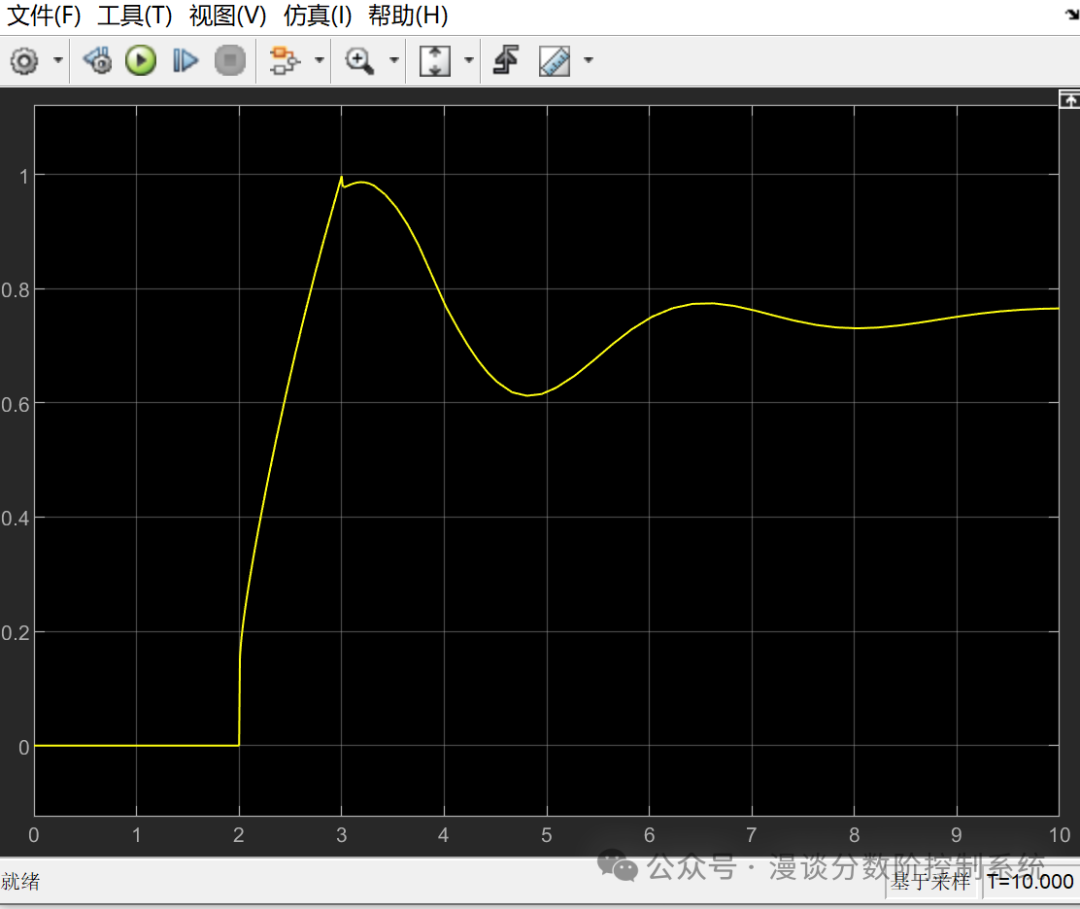
Simulation Results
- System Output: The output response of the fractional order PID controller is faster and has less overshoot compared to the traditional PID controller.
- Control Signal: The variation of the control signal is smoother, reducing the energy consumption of the system.
Through the above steps, you can implement a MATLAB simulation of fractional order PID control and observe its improvement effect on system performance.