Introduction
In today’s rapidly advancing technology landscape, drones are no longer a novelty. Once merely a quirky toy for niche enthusiasts, they have transformed into valuable assistants in fields such as photography, agriculture, and defense. The price range is vast, from entry-level toys costing a few dozen yuan to professional high-end equipment worth millions, leaving many in awe. You might wonder why such a seemingly simple drone has such a wide price disparity. In fact, achieving stable flight and precise operation involves complex underlying technologies! For instance, maintaining stability in the air requires precision sensors like gyroscopes, along with accurate processing of sensor readings to ensure smooth flight.

Project Overview
Today, I want to share an incredibly interesting open-source project — <span>ESP-Drone</span>. This project allows us to create a drone that can be easily controlled with a smartphone, using common and easily accessible components like the ESP32 module, MPU6050 inertial measurement unit, brushless motors, and plastic propellers, all of which are compact and convenient for assembly and transport.
Core Components of the Project
ESP32 Module
The ESP32 module is the “brain” of the entire project. It is powerful, integrating Wi-Fi and Bluetooth capabilities, which means the drone can easily connect to a smartphone for remote control. Additionally, it features low power consumption and high performance, allowing it to quickly process various flight data to ensure stable flight.

MPU6050 Inertial Measurement Unit
Maintaining balance during flight is crucial. The MPU6050 acts as the drone’s “balance guardian,” measuring the drone’s acceleration and angular velocity in real-time and relaying this data to the ESP32 module. The ESP32 then quickly adjusts the motor speeds based on this information, ensuring the drone remains stable in the air and avoids tilting or crashing.
Brushless Motors and Plastic Propellers
Brushless motors are powerful, efficient, and have a long lifespan. Paired with lightweight plastic propellers, they generate sufficient lift to enable the drone to take off and fly smoothly. Plastic propellers are not only cost-effective but also help reduce the overall weight of the drone, making flight more agile.
Building Process and Technical Points
To successfully build this drone, knowing the components is not enough; one must also understand the building process and key technical points. Although the project provides code, schematics, and necessary images, more detailed content can be found on Circuit Digest website.
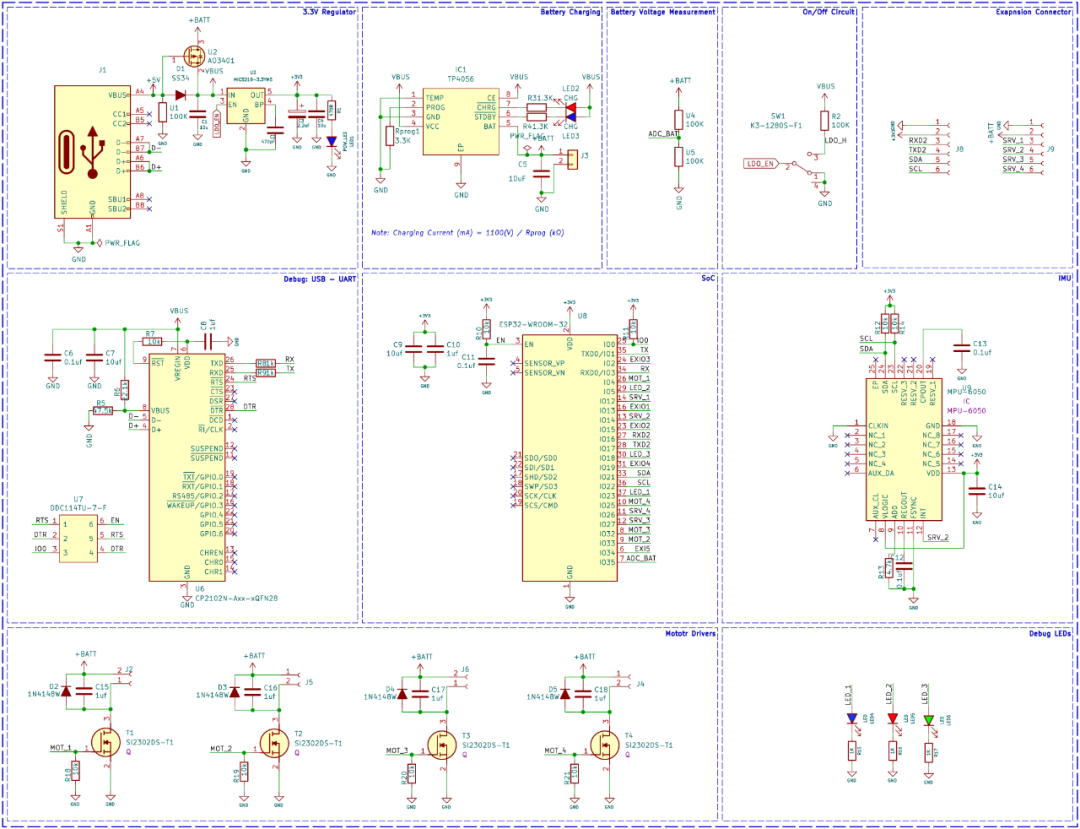
Hardware Connections
Refer to the provided ESP32 drone Schematics.pdf or ESP32 drone Schematics.png to correctly connect the ESP32 module, MPU6050, brushless motors, and other components. This step is crucial; incorrect connections may prevent the drone from functioning properly or even damage components. Pay attention to the routing of wires and the matching of interfaces to ensure each connection is secure and reliable.
Firmware Flashing
Once the hardware is connected, it’s time to flash the firmware onto the drone. When using the ESP32 Flash Download Tool, remember the offset addresses for each binary file: 0x1000 for bootloader.bin, 0x10000 for ESPDrone.bin, and 0x8000 for partition-table.bin. Be cautious during the flashing process to avoid errors, as mistakes may prevent the drone from starting.
Code and Programming
The project code is primarily written in C, with some Assembly, HTML, and CMake involved. If you’re interested in the code, delving into it can teach you a lot about drone flight control, sensor data processing, and wireless communication. For example, the code reveals how to optimize the sensor data acquisition frequency to improve the drone’s response speed to changes in attitude.
Implementing Smartphone Control
Being able to control the drone with a smartphone is undoubtedly one of the most appealing aspects of this project. By leveraging the Wi-Fi or Bluetooth capabilities of the ESP32 module, along with a dedicated mobile application, remote control can be achieved. Imagine easily controlling the drone’s ascent, descent, forward, backward, left, and right movements using a virtual joystick on your phone screen — how cool is that? Moreover, you can customize the mobile application to add more fun features, such as setting flight paths and viewing flight data in real-time.

Conclusion
This <span>ESP-Drone </span> open-source project not only allows us to experience the joy of DIY but also provides a deeper understanding of the technical principles behind drones. Whether you’re a drone enthusiast or someone looking to learn hardware development and programming, this project is worth a try. Get started and embark on your own drone exploration journey! If you have any insights or encounter any issues during the building process, feel free to share and discuss in the comments section so we can all improve together!
Source Code Address
https://github.com/Circuit-Digest/ESP-Drone
Recommended Reading
- • Most of the past technical content is here!
