What is a Robot Control System?
Having only sensors and muscles is not enough for human limbs to move. On one hand, sensory signals need organs to receive and process them; on the other hand, there are no organs to send neural signals that drive muscle contraction or relaxation.
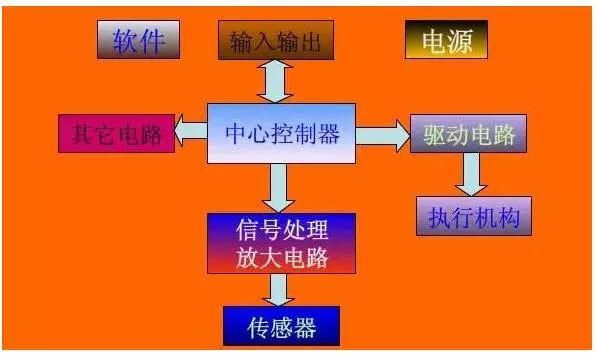
Similarly, if a robot only has sensors and actuators, its robotic arm cannot function properly. This is because the signals output from the sensors are ineffective, and the motors do not receive the necessary voltage and current. Therefore, a controller is needed to form a control system made up of hardware and software.
The function of the robot control system is to receive detection signals from sensors and drive the motors in the robotic arm according to the requirements of the operational task. Just as human activities rely on their own sensory inputs, the motion control of robots is inseparable from sensors.
Robots need to use sensors to detect various states. The internal sensor signals of the robot reflect the actual motion state of the robotic arm joints, while external sensor signals are used to detect changes in the working environment.
Thus, the robot’s nervous system and brain must work together to form a complete robot control system.
What aspects does a robot motion control system include?
Actuators —- servo motors or stepper motors;
Driving mechanisms —- servo or stepper drivers;
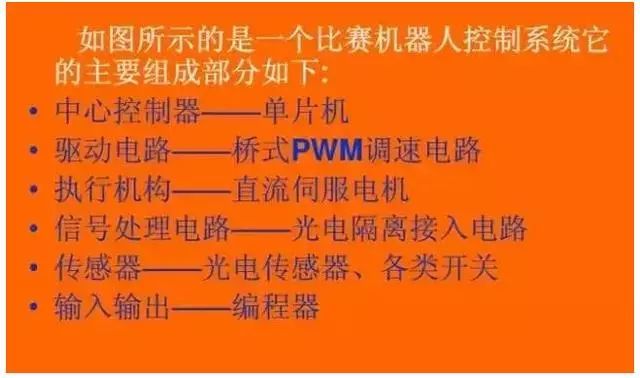
Control mechanisms —- motion controllers, performing path and motor linkage algorithm calculations;
Control methods —- if there are fixed execution actions, the program with fixed parameters should be compiled for the motion controller; if there is a vision system or other sensors, a program with variable parameters should be compiled based on sensor signals for the motion controller.
Basic Functions of Robot Control Systems
Control the motion position of the end-effector of the robotic arm (i.e., control the points and movement paths the end-effector passes through)
Control the motion posture of the robotic arm (i.e., control the relative position of two adjacent moving components)
Control the movement speed (i.e., control the rate of change of the end-effector’s motion position over time)
Control the movement acceleration (i.e., control the speed variation of the end-effector during motion)
Control the output torque of each power joint in the robotic arm (i.e., control the force applied to the object being operated on)
Provide convenient human-machine interaction functions, allowing the robot to complete specified tasks through memory and reproduction
Enable the robot to detect and sense external environments. Industrial robots are equipped with sensors for vision, force, and touch to measure, identify, and assess changes in working conditions.
Industrial Robot Control Systems
1. Hardware Structure of Industrial Robot Control Systems
The controller is the core of the robot system, and foreign companies have implemented strict restrictions on our country. In recent years, with the development of microelectronics technology, the performance of microprocessors has increased while prices have decreased. Currently, 32-bit microprocessors are available on the market for 1-2 US dollars. Cost-effective microprocessors have brought new development opportunities for robot controllers, making it possible to develop low-cost, high-performance robot controllers. To ensure the system has sufficient computing and storage capabilities, current robot controllers typically use chips from the ARM series, DSP series, POWERPC series, Intel series, etc.
Moreover, existing general-purpose chips do not fully meet the requirements of certain robot systems in terms of price, performance, integration, and interfaces. This has led to a demand for SoC (System on Chip) technology in robot systems, integrating specific processors with required interfaces to simplify the design of peripheral circuits, reduce system size, and lower costs. For example, Actel has integrated the NEOS or ARM7 processor cores into its FPGA products, forming a complete SoC system. Research in robot motion controllers is mainly concentrated in the United States and Japan, with mature products available, such as those from DELTATAU in the USA and PONTE in Japan. Their motion controllers are based on DSP technology and adopt an open structure based on PC.
2. Architecture of Industrial Robot Control Systems
In terms of controller architecture, research focuses on functional division and the standardization of information exchange between functions. In the research on open controller architectures, there are two basic structures. One is based on hardware hierarchy division, which is relatively simple. In Japan, the architecture is hardware-based, such as Mitsubishi Heavy Industries dividing its PA210 portable general-purpose intelligent robotic arm into a five-layer structure; the other is based on functional division, which considers both hardware and software, and is the direction of research and development for robot controller architecture.
3. Control Software Development Environment
In terms of the robot software development environment, most industrial robot companies have their own independent development environments and unique robot programming languages, such as Japan’s Motoman, Germany’s KUKA, America’s Adept, and Sweden’s ABB. Many universities have conducted extensive research on robot development environments (Robot Development Environment) and provided many open-source resources that can be integrated and controlled under certain robotic hardware structures. Many related experiments have been conducted in laboratory settings.
Existing robot system development environments include TeamBots v.2.0e, ARIA V.2.4.1, Player/Stage v.1.6.5.1.6.2, Pyro v.4.6.0, CARMEN v.1.1.1, MissionLab v.6.0, ADE v.1.0 beta, Miro v.CVS-March 17, 2006, MARIE v.0.4.0, FlowDesigner v.0.9.0, RobotFlow v.0.2.6, etc. From the perspective of robot industry development, there are two demands for the robot software development environment. On one hand, there are demands from end-users who not only use robots but also hope to endow robots with more functionalities through programming. This programming is often realized using visual programming languages, such as the graphical programming environment of LEGO MindStorms NXT and the visual programming environment provided by Microsoft Robotics Studio.
4. Specialized Operating Systems for Robots
(1) VxWorks: The VxWorks operating system is an embedded real-time operating system (RTOS) designed and developed by Wind River in the USA in 1983. It is a key component of the Tornado embedded development environment. VxWorks features a customizable microkernel structure; efficient task management; flexible inter-task communication; microsecond-level interrupt handling; support for POSIX 1003.1b real-time extension standards; and support for various physical media and standard, complete TCP/IP network protocols.
(2) Windows CE: Windows CE has good compatibility with the Windows series, which is undoubtedly a significant advantage for its promotion. Windows CE provides a feature-rich operating system platform for establishing dynamic applications and services for handheld and wireless devices. It can run on various processor architectures and is usually suitable for devices with certain memory constraints.
(3) Embedded Linux: Due to its open-source nature, users can modify it freely to suit their applications. Most of it adheres to GPL, making it open-source and free. It can be slightly modified for use in the user’s own system. There is a large developer community, and no specialized talent is needed; anyone familiar with Unix/Linux and C language can work with it. It supports a vast number of hardware. Embedded Linux is not fundamentally different from regular Linux; almost all hardware used on PCs is also supported by embedded Linux. Moreover, the source code for drivers for various hardware can be obtained, which greatly facilitates users in writing their proprietary hardware drivers.
(4) μC/OS-Ⅱ: μC/OS-Ⅱ is a well-known open-source real-time kernel designed specifically for embedded applications, usable on 8-bit, 16-bit, and 32-bit microcontrollers or digital signal processors (DSPs). Its main features include open-source code, good portability, the ability to be embedded, customizability, preemptive kernel, and determinism.
(5) DSP/BIOS: DSP/BIOS is a real-time multitasking operating system kernel designed and developed by TI specifically for its TMS320C6000, TMS320C5000, and TMS320C28x series DSP platforms. It is a component of TI’s Code Composer Studio development tools. DSP/BIOS mainly consists of three parts: a multithreaded real-time kernel; real-time analysis tools; and chip support libraries. Developing programs using a real-time operating system allows for convenient and rapid development of complex DSP programs.
5. Robot Servo Communication Bus Technology
Currently, there is no dedicated servo communication bus for robot systems internationally. In practical applications, common buses such as Ethernet, CAN, 1394, SERCOS, USB, RS-485, etc., are often used based on system requirements. Most current communication control buses can be categorized into two types: serial bus technology based on RS-485 and line driver technology, and high-speed serial bus technology based on real-time industrial Ethernet.
(1) Open Modular Control System Architecture: Adopting a distributed CPU computer structure, divided into Robot Controller (RC), Motion Controller (MC), opto-isolated I/O control board, sensor processing board, and programming teaching box, etc. The Robot Controller (RC) and programming teaching box communicate through serial/CAN bus. The main computer of the Robot Controller (RC) completes the robot’s motion planning, interpolation, and position servo, as well as the main control logic, digital I/O, and sensor processing functions, while the programming teaching box displays information and inputs commands.
(2) Modular Hierarchical Controller Software System: The software system is built on an open-source real-time multitasking operating system, Linux, and is designed with a layered and modular structure to achieve software system openness. The entire controller software system is divided into three levels: hardware driver layer, core layer, and application layer. Each level addresses different functional requirements and corresponds to different levels of development, with each level composed of several functionally opposing modules that cooperate to achieve the functions provided by that level.
(3) Robot Fault Diagnosis and Safety Maintenance Technology: Diagnosing robot faults through various information and performing corresponding maintenance is a key technology to ensure the safety of robots.
(4) Networked Robot Controller Technology: Currently, the application of robots is evolving from single robot workstations to robot production lines, making the networking technology of robot controllers increasingly important. Controllers are equipped with serial, fieldbus, and Ethernet networking capabilities, facilitating communication between robot controllers and between robot controllers and upper computers for monitoring, diagnosis, and management of robot production lines.
Disclaimer: This article is a network reprint, and the copyright belongs to the original author. However, due to numerous reprints, it is impossible to confirm the true original author, so only the source of reprint is indicated. If any videos, images, or texts used in this article involve copyright issues, please notify us promptly, and we will confirm the copyright based on the proof you provide and pay remuneration or immediately delete the content according to national standards! The content of this article represents the views of the original author and does not reflect the views of this public account or bear responsibility for its authenticity.