V2X technology connects vehicles with other traffic participants (such as other vehicles and pedestrians) and infrastructure like traffic lights and roadside units through real-time communication, thereby enhancing road safety, optimizing traffic efficiency, and providing critical support for autonomous driving.
This article will comprehensively explore the implementation path of V2X technology from the aspects of technical principles, system architecture design, antenna layout optimization, and challenges and solutions in practical applications.
1. Technical Principles and Core Functions of V2X
The core of V2X lies in achieving real-time information exchange between vehicles and their surrounding environment. Modern vehicles are typically equipped with various sensors (such as LiDAR, radar, and cameras) to collect data about the surrounding environment. However, the capabilities of these sensors are limited by their line of sight, making it impossible to cover scenarios without direct visibility.
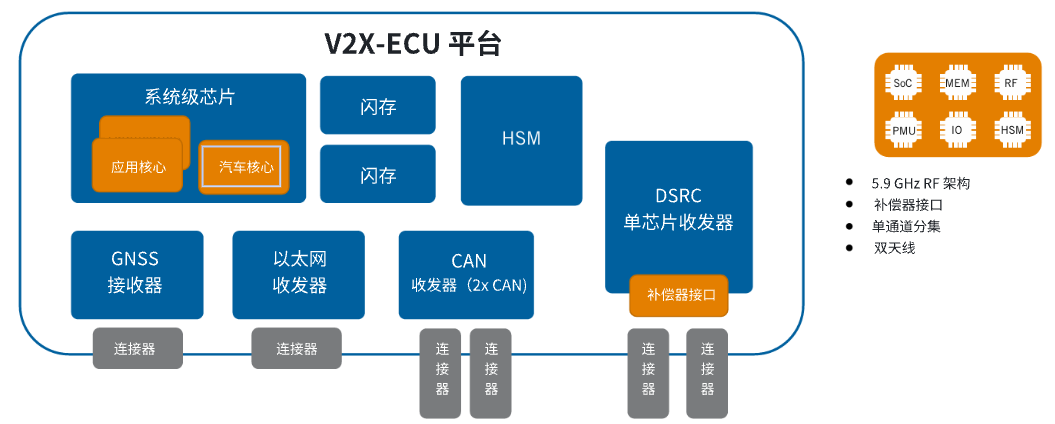 V2X-ECU Hardware Architecture
V2X-ECU Hardware Architecture
V2X technology compensates for this limitation through wireless communication, allowing vehicles to anticipate potential dangers beyond the line of sight, such as construction zones around corners or suddenly appearing emergency vehicles. This capability provides additional reaction time for drivers or autonomous driving systems, significantly reducing the risk of accidents.
In a V2X system, all participants (including vehicles and infrastructure) broadcast their position, speed, and direction of movement multiple times per second. This data is obtained through global navigation satellite systems, including GPS, GLONASS, Galileo, and BeiDou.
High-precision location information and time synchronization are fundamental to the normal operation of V2X systems; any error could lead to communication failure or misjudgment. Therefore, V2X systems are typically tightly coupled with the vehicle’s GNSS receiving module to ensure the timeliness and accuracy of the data.
2. Architecture Design of V2X: Centralized and Distributed Solutions
Integrating V2X technology into the vehicle’s electrical/electronic (E/E) architecture requires selecting an appropriate solution based on the specific needs and design goals of the vehicle.
Currently, there are two mainstream V2X communication standards in the market: Dedicated Short Range Communication (DSRC) based on IEEE802.11p and Cellular Vehicle-to-Everything (C-V2X) based on 3GPP mobile communication standards. These two standards differ in technical implementation but share the same goal of achieving efficient communication between vehicles and their surrounding environment.
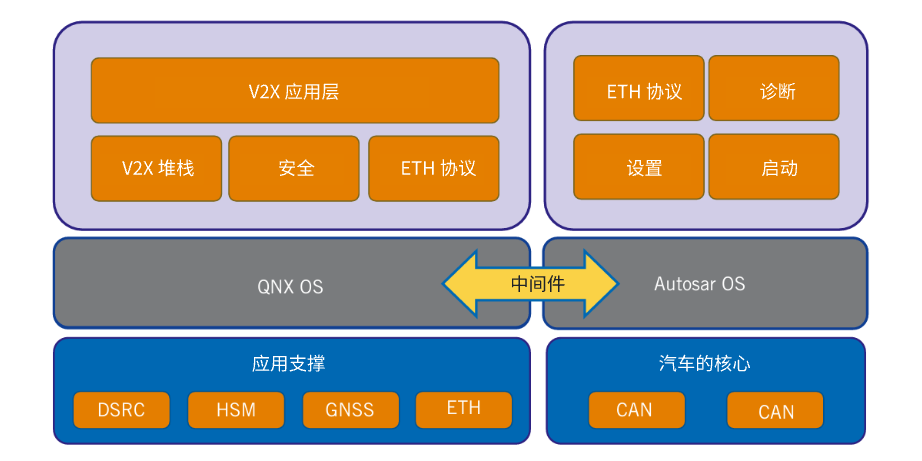
V2X-ECU Software Architecture
Centralized Architecture: Independent Control Unit
In a centralized architecture, V2X functions are integrated into an independent control unit. This unit contains a complete V2X protocol stack, from low-level radio communication to high-level application logic, and is equipped with a hardware security module (HSM) for handling encryption and authentication tasks.
This design encapsulates all functions within a single device, interacting with other vehicle systems through an Ethernet interface. Its advantages include high functional integration, ease of maintenance, and upgrades; however, it may become a single point of failure for the system and has high hardware performance requirements.
Distributed Architecture: Modular Design
The distributed architecture splits V2X functions into multiple modules, such as placing the radio transceiver unit near the antenna while computational tasks are handled by other high-performance computing units in the vehicle (such as domain controllers or central computers).
This design reduces the complexity of individual devices through modularization and better adapts to different architectural needs of vehicles (such as domain-centric or vehicle-centric). Additionally, the distributed architecture can flexibly respond to future technology upgrades, such as transitioning from DSRC to C-V2X.
3. Antenna Design and Signal Optimization
The performance of V2X systems largely depends on the layout of antennas and signal quality. Since V2X communication uses the high-frequency band of 5.9GHz, its signals are susceptible to obstruction and interference. To ensure 360° omnidirectional coverage, two antennas are typically installed in vehicles, located on the roof fin and near the front or rearview mirror.
The installation position of the antenna and the surrounding environment (such as roof material and glass area) can significantly affect signal strength. For example, a steel roof can provide better signal reflection, while a glass roof may lead to signal attenuation.
For different vehicle models, antenna designs also need to be customized. Passenger car antennas are typically integrated into the roof fin, optimizing signal radiation through microstrip lines and baluns; commercial vehicle antennas may be installed in wing structures on both sides of the cab to overcome signal coverage challenges posed by vehicle size; while motorcycle antenna designs must consider changes in polarization characteristics when the vehicle tilts to ensure communication stability.
Additionally, V2X signals may attenuate during transmission due to cable length and connector losses. For instance, a 5.9GHz signal loses 0.12dB every 10 centimeters in coaxial cables, and with connector losses, a 2-meter cable could result in a 50% loss of signal energy.
To address this issue, intelligent compensators are used to dynamically amplify signals while monitoring antenna status and signal strength in real-time through diagnostic interfaces.
4. Customized Platforms and Future Prospects
To meet the needs of different vehicle manufacturers, TEConnectivity has developed a modular V2X control unit platform. This platform is based on a multi-core system-on-chip (SoC), supports both DSRC and C-V2X dual standards, and interacts with other vehicle systems through automotive Ethernet and CAN bus. Its software architecture adopts a layered design, including real-time operating systems (such as QNX), V2X protocol stacks, and middleware (such as SOME/IP), facilitating functional expansion and upgrades.
In the future, the widespread adoption of V2X technology will depend on the standardization process and cost optimization. Although there are currently no mandatory regulations, with the development of autonomous driving and intelligent transportation systems, V2X will become an indispensable part. Furthermore, the further integration of technologies (such as the combination of 5G and C-V2X) will bring broader application scenarios.
5. In Conclusion
V2X technology expands the perception capabilities of vehicles through real-time communication, bringing revolutionary improvements to traffic safety and efficiency. Its implementation requires comprehensive consideration of architectural design, antenna layout, and signal optimization.
Whether centralized or distributed architecture, the choice must be based on the specific needs of the vehicle. As technology matures and standards unify, V2X will become a core pillar of intelligent transportation systems, driving the automotive industry towards a safer and more efficient future.
END