In-Depth Analysis of Linux Lock Mechanisms: From Principles to Practice
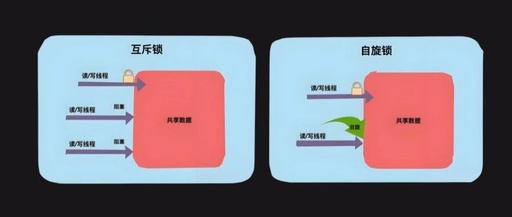
In-Depth Analysis of Linux Lock Mechanisms: From Principles to Practice 1 Overview of Linux Lock Mechanisms In the field of concurrent programming, lock mechanisms are the cornerstone technology for ensuring data consistency and operation atomicity in multi-threaded and multi-tasking environments. As a complex modern operating system, Linux needs to manage resource sharing issues in multi-processor … Read more