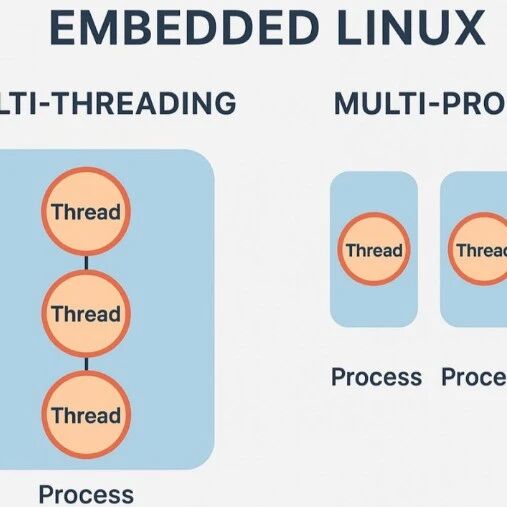
Multithreading and Multiprocessing in Python Concurrency Programming
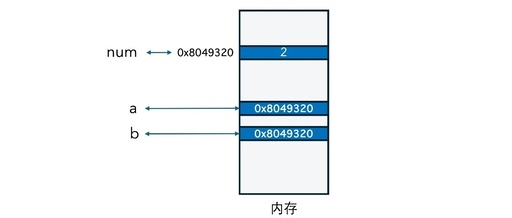
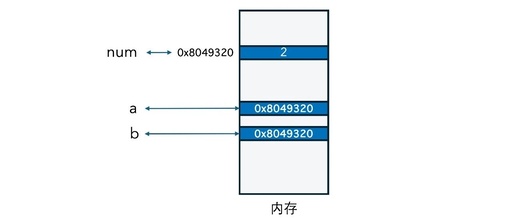
Concurrency refers to the ability of a program to handle multiple tasks simultaneously. In Python, the two core methods for achieving concurrency are multithreading and multiprocessing. Although both can execute tasks “in parallel”, their underlying implementations and applicable scenarios are quite different, with the key difference being the memory space isolation between processes and threads.Multithreading … Read more