ADAS stands for Advanced Driver Assistance System, which translates to 高级驾驶辅助系统 in Chinese. Simply put, it actively makes judgments and preventive measures before the driver’s subjective reaction in emergency situations to achieve preventive and assistive effects. We can refer to it as a simplified version of autonomous driving—ADAS advanced driver assistance system.
ADAS is not exactly autonomous driving; the research focus of the two is completely different. ADAS is about driver assistance, with a core emphasis on environmental perception, while autonomous driving is based on artificial intelligence, with significant differences in their systems. However, ADAS can also be seen as a prerequisite for autonomous vehicles. The key to determining whether a system is an ADAS or an autonomous driving system lies in whether it has a decision-making component.
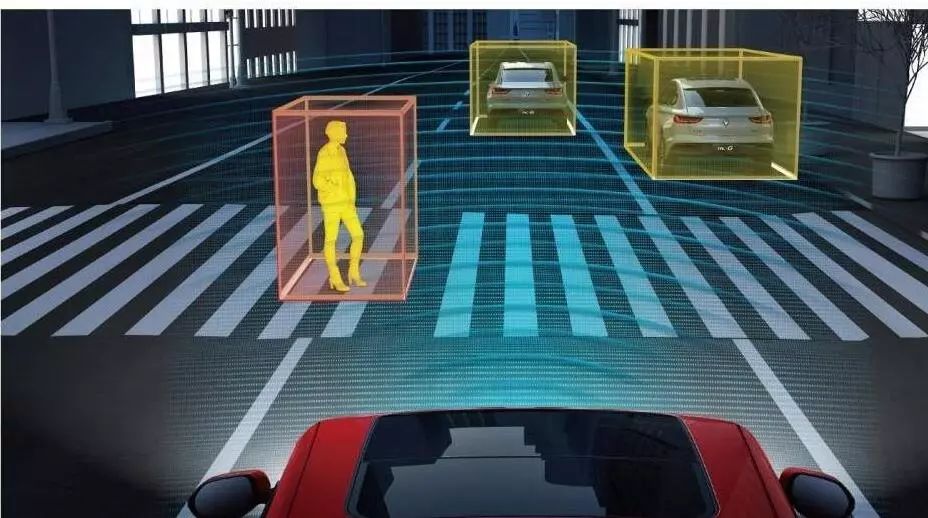
ADAS primarily employs sensors such as cameras, radar, lasers, and ultrasonic sensors to detect light, heat, pressure, or other variables used to monitor the vehicle’s status. These sensors are typically located on the front and rear bumpers, side mirrors, inside the steering column, or on the windshield. Early ADAS technologies mainly focused on passive alerts, issuing warnings to alert drivers to abnormal vehicles or road conditions when potential hazards are detected.
In recent years, the ADAS market has grown rapidly. Originally, these systems were limited to the high-end market, but they are now entering the mid-range market. Meanwhile, many low-tech applications are becoming more common in entry-level passenger vehicles, and improved new sensor technologies are creating new opportunities and strategies for system deployment.
The driving assistance system mainly consists of GPS and CCD camera detection modules, communication modules, and control modules. The GPS and CCD camera detection module receives GPS satellite signals through a GPS receiver to determine the vehicle’s latitude, longitude coordinates, speed, time, etc. It uses CCD cameras installed at the front and rear of the vehicle to observe the conditions beside the road in real-time. The communication module can send detected relevant information and transfer driving information in real-time between nearby vehicles. The control module can take proactive control when an accident is about to occur, thus avoiding the accident.
ADAS typically includes the following systems:
1. Navigation system;
2. Real-time traffic system TMC (Traffic Message Channel);
3. Intelligent Speed Adaptation or Intelligent Speed Advice (ISA);
4. Vehicular Communication Systems (VSA);
5. Vehicle Detection (VD): Currently, VD can detect vehicles up to 70 meters away based solely on visual patterns and can continuously track vehicles up to 100 meters away. However, it is unavailable in fog, extreme weather, or when the camera is obstructed, but it can prompt users when it is unavailable;
6. Adaptive Cruise Control (ACC): ACC is generally based on radar or laser technology. It can now also be based on visual/camera technology;
7. Lane Departure Warning System (LDWS): LDW can detect various lane markings and roadside conditions at night, in rain, and snow (not especially extreme weather). It works on straight roads and curves but automatically shuts down and gives a prompt in poor visibility conditions;
8. Lane Keeping Assist System (LKAS): LKAS is a smart high-tech system that can automatically control the steering wheel and adjust the vehicle to the correct driving trajectory when the vehicle deviates from the lane line involuntarily. The LKAS camera senses and detects the vehicle’s driving trajectory and transmits signals to the vehicle’s driving control system to help the vehicle stay on the correct path.
9. Headway Monitoring & Warning (HMW);
10. Forward Collision Warning System (FCWS): Most accidents occur due to delayed reactions or lack of warnings. FCW can provide warnings 2-3 seconds before a collision to avoid accidents. Therefore, FCW must detect the distance and relative speed of the vehicle or pedestrian ahead;
11. Collision Avoidance System or Pre-Crash System;
12. Pedestrian Detection (PED): General PED systems must distinguish between walking and stationary individuals and provide the position and speed of pedestrians. If a pedestrian is on the vehicle’s path, it can provide critical alerts and collision timing. In reality, people can walk, run, carry items, or push carts, and PED must handle these situations, especially crowd detection, to avoid major accidents. Detecting sidewalks, pedestrian actions, and postures is also crucial for vehicle safety;
13. Night Vision;
14. Adaptive Light Control;
15. Pedestrian Protection System;
16. Automatic Parking (AP);
17. Traffic Sign Recognition (TSR): TSR can recognize road traffic signs such as speed limit signs, including fixed or non-fixed LED signs. This information can also be integrated with navigation map information to provide more accurate data. The technical focus lies in image processing and the extraction and recognition of sign structure information;
18. Blind Spot Detection;
19. Driver Drowsiness Detection;
20. Hill Descent Control;
21. Electric Vehicle Warning Sounds;
22. Surround View Monitor (SVM): The surround view monitor typically requires four or more fisheye cameras to see all conditions around the vehicle. Technically, it requires camera calibration, image registration, stitching, and simulating the vehicle’s status;
23. Intelligent Headlight Control (IHC): IHC considers two situations: oncoming vehicles and vehicles traveling in the same direction. When an oncoming vehicle is detected within a certain distance, such as 800-1000 meters, it will switch the high beam to low beam and revert once the vehicle passes. For vehicles traveling in the same direction, it can recognize their taillights and switch the high beam to low beam when approaching a certain distance, and vice versa;
24. Augmented Reality Navigation (AR NAVI): AR NAVI combines a standard navigation device with a camera, recording the road conditions ahead and drawing virtual route arrows on the video based on navigation map information. If AR NAVI is integrated with applications like PED, VD, LDW, its functionality will be further enhanced;
25. High Beam Assist (HBA): HBA is an intelligent high-tech system that automatically switches between high and low beam systems. During nighttime driving, when an oncoming vehicle approaches or a same-direction vehicle gets close, HBA automatically assists in switching the high beam to low beam and reverts when the vehicle moves away.
HBA is particularly useful for drivers who frequently drive at night.
26. Traffic Sign Recognition System (TSR): TSR is an intelligent high-tech system that identifies and judges road traffic signs in advance. Another significant function of TSR is its ability to integrate with vehicle navigation systems to recognize road signs in real-time and transmit information to the navigation system.
27. Traffic Light Recognition System (TLR): TLR is an intelligent high-tech system that recognizes traffic lights and notifies drivers of the signal light status ahead. Additionally, TLR can be combined with vehicle cruise systems or image storage systems to assist driving more effectively.
28. Others…
1. Blind Spot Detection System
Blind spots for drivers refer to areas not visible in the three side mirrors (left, right, and rearview). Many drivers have a deep impression of blind spots, which are also one of the common causes of accidents. The blind spot detection system uses radar and sensors to detect vehicles approaching from blind spots and provides warnings to the driver, helping to minimize the chance of accidents.
2. Parking Assistance System
The ADAS parking system benefits many inexperienced drivers who struggle with parking. The parking assistance system is divided into two types: active and passive. The former automatically controls the steering wheel to assist the driver in parking, while the latter uses imaging (cameras) and audio (ultrasonic) as sensing units to provide more information about the vehicle’s surroundings to reduce collision chances.
3. Lane Departure Warning System (LDW)
This system consists of cameras, sensors, and controllers. It uses a camera mounted on the side or rearview mirror to sample the lane markings and processes images to determine the vehicle’s position within the lane. If the vehicle deviates from the lane, the controller will issue a warning signal. The entire process from sensing to warning takes about 0.5 seconds, providing real-time alerts to the driver to avoid accidents.
4. Forward Collision Warning System (FCW)
Equipped with radar installed at the front of the vehicle, it detects the distance and speed between the vehicle and the one ahead. Initially, it emits a warning sound to alert the driver to maintain distance. If the distance continues to decrease, the vehicle will apply the brakes lightly and tighten the seatbelt 2-3 times to warn the driver. If the system determines that a collision is unavoidable, it will activate Automatic Emergency Braking (AEB) and tighten the seatbelt to minimize injuries.
5. Adaptive Headlight System
This system can automatically adjust the lighting range and angle of the headlights based on different road conditions, environments, speeds, and weather, ensuring that the headlights illuminate further without affecting other road users’ visibility, thus providing safer and more comfortable lighting for drivers and oncoming vehicles. This includes past AFS active steering headlights and current multi-LED intelligent headlights with sensors.
6. Night Vision System
This system helps drivers recognize animals or large objects in low visibility conditions, such as at night or in severe weather, and warns of road conditions ahead to avoid accidents. It distinguishes between humans, animals, vehicles, and environmental differences using infrared to sense heat, converting these into images for clearer visibility of previously invisible objects, thus reducing driving risks.
7. Adaptive Cruise Control System (ACC)
This system uses a distance sensor installed at the front of the vehicle to continuously scan the road ahead to determine the speed and relative distance of the vehicle in front. It automatically adjusts its speed to maintain a safe distance from the vehicle ahead, reducing the likelihood of collisions, essentially serving as a high-end version of cruise control, which is now commonly seen in many vehicle models.
8. Driver Physiological State Monitoring
Most systems currently use cameras to detect the driver’s face, assessing focus levels and signs of drowsiness. Some systems even analyze the frequency of the driver’s eye blinks to determine safety levels and provide appropriate warnings or assistance. If the driver’s facial expressions diminish or if they appear to close their eyes, the vehicle will alert the driver with sounds and lights to reduce the risk of accidents.
9. The Three Steps of Each System

Each system mentioned above mainly consists of three processes: information collection, analysis, and command execution.
A. First, information collection: Different systems require various types of automotive sensors, including millimeter-wave radar, ultrasonic radar, infrared radar, laser radar, CCD CMOS image sensors, and wheel speed sensors, to gather the vehicle’s operational status and parameter changes, converting mechanical movements into electronic parameters (voltage, resistance, and current). For example, the lane departure warning system uses CMOS image sensors, while the night vision system uses infrared sensors, and adaptive cruise control typically uses radar, while parking assistance systems may use ultrasonic sensors.
The ADAS system must first use different types of automotive sensors, including millimeter-wave radar, ultrasonic radar, infrared radar, laser radar, CCD CMOS image sensors, and wheel speed sensors, to understand external vehicle conditions before proceeding with warnings or reactions.
B. Next is information analysis and command issuance: The Electronic Control Unit (ECU) analyzes the information collected by the sensors and then issues action commands to the control execution devices.
C. Finally, action execution: This includes the throttle, brakes, lights, sounds, and other systems, which fall under the category of actuators. They execute various reactions based on the signals output by the ECU, allowing the vehicle to drive safely on the road.
Currently, the main function of the ADAS system is not to fully control the vehicle but to provide the driver with information about the vehicle’s operational status and changes in the external environment, analyze related information, and preemptively warn of potential dangers, allowing the driver to take timely measures to avoid traffic accidents. The ultimate goal of becoming a fully autonomous intelligent vehicle technology foundation is also a direction that the ADAS system is actively pursuing, but this requires accumulating usage experience and overcoming blind spots, as well as integrating more proactive detection systems and even IoT functionalities to have a chance to be further realized.
The Relationship Between Autonomous Driving and ADAS
Autonomous driving is the ultimate goal of advanced driver assistance, with ADAS belonging to the L2 (partial automation) level of autonomous driving. The maturity and perfection of the ADAS system are basic guarantees on the road to L5 level autonomous driving. Currently, in terms of technology, the ADAS system needs to overcome challenges in the accuracy of external information collection and data processing capabilities. The solution for the former is a combination of high-precision photography and laser radar, while the latter’s solution involves specialized automotive-grade processing chips such as MCU, GPU, or GPU+FPGA. Naturally, the development of high-precision maps is also crucial to this process.
Current Status and Trends of ADAS Development
At this stage, the ADAS system is primarily controlled by four major manufacturers (Autoliv, Bosch, Continental, Delphi) and Mobileye. The domestic market, due to the late start and low starting point of the automotive industry, has insufficient development efforts for advanced automotive technology represented by driver assistance systems. Currently, the country has not yet introduced plans to promote the technological development of driver assistance systems. Domestic automotive manufacturers, constrained by funding and research capabilities, have invested relatively little in the development of advanced driver assistance systems. In terms of policy, China has not yet implemented mandatory installation regulations for advanced driver assistance systems, but has introduced mandatory technical regulations for daytime running lights and tire pressure monitoring systems installed in the domestic market, which are already in effect.
Development Trends
(1) From a technological development perspective, as consumers’ emphasis on automotive safety will only increase, advanced driver assistance systems will undoubtedly maintain a trend of continuous development for a long time. At the same time, advanced driver assistance systems are transitioning from independent development of individual technologies to the development of integrated active safety systems, where multiple technologies can share sensors, control systems, and other platforms. Once a vehicle is equipped with basic technologies such as ESP and ACC, it can conveniently and cost-effectively add other safe driving assistance technologies, further promoting the application of advanced driver assistance system technologies in automobiles.
(2) Some relatively low-end yet practical advanced driver assistance system technologies, such as tire pressure monitoring systems and electronic stability programs (ESP), have already gained full market recognition. Driven by strong demand, their penetration rate in the low-end market will steadily increase.
(3) Chinese consumers show significant interest and demand for risk-avoidance assistance and vision-improvement technologies, which will undoubtedly become the main growth point in this field in the next stage.
(4) Some technologies that require higher road conditions, such as lane change assistance, lane departure warnings, and ACC, as well as technologies that do not align with Chinese consumer driving habits, such as lane-keeping systems, driver fatigue detection, and alcohol lock systems, may face a prolonged period of slow development.