The US Navy proposed the concept of “Network-Centric Warfare” in 1997. With the support of the Department of Defense’s backbone router network, a joint sensor network was established to implement network-centric warfare, enabling global point-to-point links between ground, air, space, and surface communication platforms for extensive and continuous monitoring of land, sea, and air. However, due to the lack of underwater communication nodes, this powerful information network could not provide the US Navy with the capability to monitor underwater targets. Therefore, establishing an underwater sensor network to enhance the functionality of the joint sensor network has become a focal point. To address this shortcoming and enhance ocean data collection and underwater early warning capabilities, the US Navy has continuously conducted wide-area “Seaweb” underwater acoustic communication network experiments since 1998, quickly confirming the feasibility of underwater networking using acoustics and deriving a series of acoustic network plans and applications, showcasing the vast prospects of underwater acoustic network applications.
The underwater sensor network is a distributed, multi-node, large-area coverage system composed of sensor nodes deployed on the seabed and in the sea, surface buoy nodes, and bidirectional acoustic links between them. It can collect, process, classify, and compress information and relay it back to land-based or sea-based information control centers through underwater communication network nodes. The United States is one of the earliest countries to conduct research on underwater sensor networks, making significant progress in the last two to three decades. The US Navy is vigorously developing underwater wireless network communication capabilities, driven by profound historical backgrounds and urgent practical needs.
The demand for near-shore combat is the fundamental driving force behind the development of underwater sensor networks. Since the 1990s, guided by the Department of Defense’s strategic guidelines of “from sea to land,” the strategic focus of the US Navy has gradually shifted from deep sea to shallow sea, formulating the “21st Century Maritime Power” and the “Navy Transformation Plan” to deepen this strategy. They proposed the construction of underwater sensing systems, creating an underwater network for the Navy’s “military network” and developing network connectivity capabilities “from the seabed to space” to achieve timely and accurate situational awareness of near-shore battle environments.
The insufficiency of the existing underwater detection capabilities of the US Navy is a practical factor driving the development of underwater sensor networks. Due to the lack of effective monitoring capabilities for underwater targets, especially in the face of anti-submarine warfare (ASW) and mine-hunting needs in near-shore combat, the US Navy must inevitably increase underwater detection range and resolution, enhance underwater battlefield information control capabilities, and expand the underwater acoustic early warning detection range. Therefore, the US Navy is vigorously developing underwater sensor networks, positioning them as a defense battlefield and security barrier to safeguard the security of US territorial waters, naval forces, and maritime power.
The maturation of underwater acoustic networking technology is a driving factor for the development of underwater sensor networks. Underwater acoustic networking technology is the key technology of underwater sensor networks, involving underwater acoustic data exchange technology, transmission technology, shared system technology, and broadband access technology. Since the 1990s, research on underwater acoustic networking technology has continuously overcome the impact of the marine environment on underwater sensor networks, with technical performance maturing. Driven by underwater acoustic networking technology, the underwater sensor network system has gradually improved, widely adopting standard communication components and commercial off-the-shelf technologies, exhibiting characteristics such as large-scale, self-organization, and dynamism, thereby enhancing the ability to acquire environmental data, tactical data, and intelligence data.
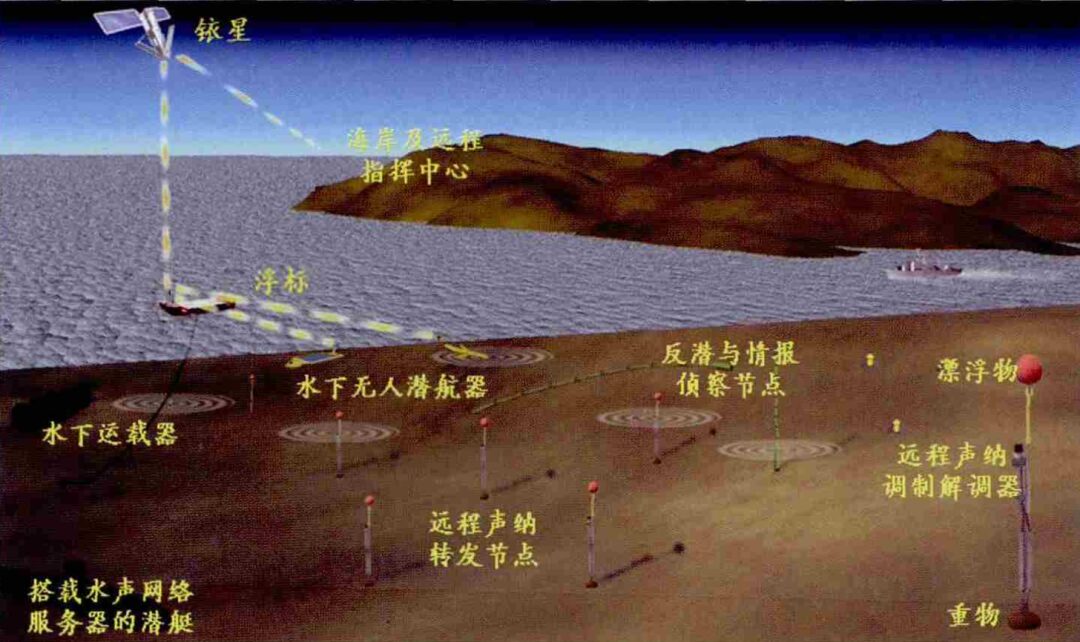 Conceptual diagram of the US Navy’s underwater sensor network
In the process of building the underwater sensor network, the US Navy has adopted a traditional research and development model combining research institutions, industry sectors, and military units, focusing on the R&D of “Seaweb” related technologies, experiencing three main stages: concept development, prototype testing, and application deployment. Through nearly 20 years of development, “Seaweb” has been successfully applied in naval fleet combat experiments (FBE-I project), shallow water anti-submarine warfare (ASW) (HYDRA project), underwater communication, and other tasks.
Concept Development Stage (1950s to Mid-1990s)
During this stage, underwater acoustic communication technology was in the theoretical and technical research phase, primarily focusing on establishing simulation systems and conducting research on underwater acoustic coherent communication technology. By the mid-1990s, significant advancements in underwater acoustic communication rates and distances in shallow water environments made the establishment of underwater networks possible.
Prototype Testing Stage (Late 1990s to Early 21st Century)
During this stage, both underwater acoustic communication technology and underwater network technology steadily developed, with various underwater sensor network technologies and devices, including underwater acoustic modems, becoming increasingly refined through multiple networking tests. The US Navy began the annual “Seaweb” experiments in 1998 to validate the concept of underwater sensor networks.
Application Deployment Stage (Early 21st Century to Present)
After multiple tests, the US Navy has demonstrated the feasibility of high-quality data transmission over vast water areas using underwater acoustic networks under harsh shallow water conditions. Subsequently, they conducted application research on underwater sensor networks and began constructing several underwater acoustic network application projects, including the “Seaweb” submarine data link, starting in the 2004 fiscal year. During the anti-submarine warfare exercise in San Diego in 2004, “Seaweb” was first applied in combat by the US Navy submarine forces, enabling covert underwater communication between submarines and surface vessels through “Seaweb.” Supported by the “Seaweb” network, the US Navy also implemented the “Near-Shore Underwater Persistent Surveillance Network” plan.
In the future, the US Navy will focus on building near-shore underwater persistent surveillance networks and autonomous distributed sensor systems, aiming to establish underwater information detection networks along the coasts of potential adversaries to closely monitor and predict marine environments, effectively addressing the threats posed by quiet diesel-electric submarines from these nations.
Conceptual diagram of the US Navy’s underwater sensor network
In the process of building the underwater sensor network, the US Navy has adopted a traditional research and development model combining research institutions, industry sectors, and military units, focusing on the R&D of “Seaweb” related technologies, experiencing three main stages: concept development, prototype testing, and application deployment. Through nearly 20 years of development, “Seaweb” has been successfully applied in naval fleet combat experiments (FBE-I project), shallow water anti-submarine warfare (ASW) (HYDRA project), underwater communication, and other tasks.
Concept Development Stage (1950s to Mid-1990s)
During this stage, underwater acoustic communication technology was in the theoretical and technical research phase, primarily focusing on establishing simulation systems and conducting research on underwater acoustic coherent communication technology. By the mid-1990s, significant advancements in underwater acoustic communication rates and distances in shallow water environments made the establishment of underwater networks possible.
Prototype Testing Stage (Late 1990s to Early 21st Century)
During this stage, both underwater acoustic communication technology and underwater network technology steadily developed, with various underwater sensor network technologies and devices, including underwater acoustic modems, becoming increasingly refined through multiple networking tests. The US Navy began the annual “Seaweb” experiments in 1998 to validate the concept of underwater sensor networks.
Application Deployment Stage (Early 21st Century to Present)
After multiple tests, the US Navy has demonstrated the feasibility of high-quality data transmission over vast water areas using underwater acoustic networks under harsh shallow water conditions. Subsequently, they conducted application research on underwater sensor networks and began constructing several underwater acoustic network application projects, including the “Seaweb” submarine data link, starting in the 2004 fiscal year. During the anti-submarine warfare exercise in San Diego in 2004, “Seaweb” was first applied in combat by the US Navy submarine forces, enabling covert underwater communication between submarines and surface vessels through “Seaweb.” Supported by the “Seaweb” network, the US Navy also implemented the “Near-Shore Underwater Persistent Surveillance Network” plan.
In the future, the US Navy will focus on building near-shore underwater persistent surveillance networks and autonomous distributed sensor systems, aiming to establish underwater information detection networks along the coasts of potential adversaries to closely monitor and predict marine environments, effectively addressing the threats posed by quiet diesel-electric submarines from these nations.
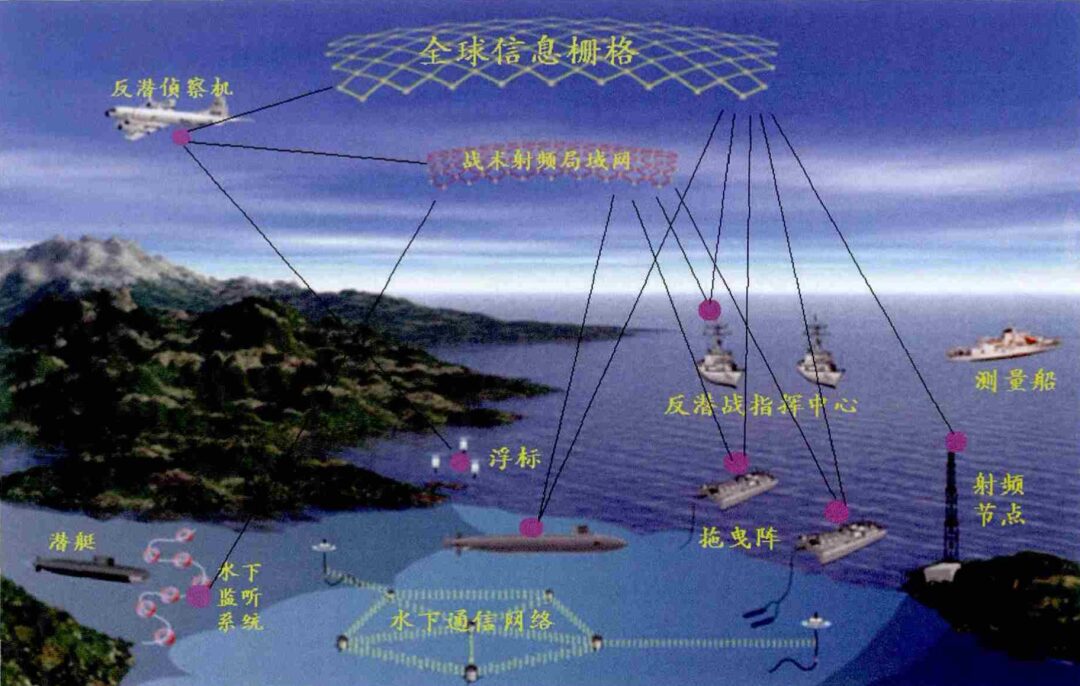
Illustration of US Navy underwater combat
3. Composition and Functions
A typical underwater sensor network system includes distributed sensor nodes, transceivers, the internet, and user interfaces. The internet and user interfaces consist of various network devices and applications, primarily used to implement the C4I functions of the underwater sensor network.
Sensor nodes obtain parameters of underwater physical phenomena through different types of sensors and transmit information using acoustic modems. Their composition includes four basic units: sensing unit (composed of sensors and analog-to-digital conversion modules), processing unit (including CPU, memory, embedded operating systems, etc.), communication unit (composed of acoustic modems), and power supply. Additionally, other optional functional units may include positioning systems and mobility systems.
The transceiver is a key node that connects the underwater acoustic sensor network to terrestrial or aerial conventional networks. Its function is to concentrate the data packets from the underwater acoustic sensor network, convert them into data packets that can be received by wireless or wired networks, and then forward them. If the transceiver is used for wireless network access, this node can be a surface station, a dedicated buoy, or a surface vessel; if the transceiver is used for wired network access, then this node can be a land-based station.
Overall, conducting medium to long-term underwater early warning, target detection, and monitoring of marine hydrological environmental factors in the area covered by underwater sensor nodes is an important use of underwater networks. At the same time, in the future, underwater data communication will be crucial in a vast anti-submarine warfare network composed of multiple bases and distributed sensor systems, and the underwater sensor network will undertake important missions of detection and data communication.
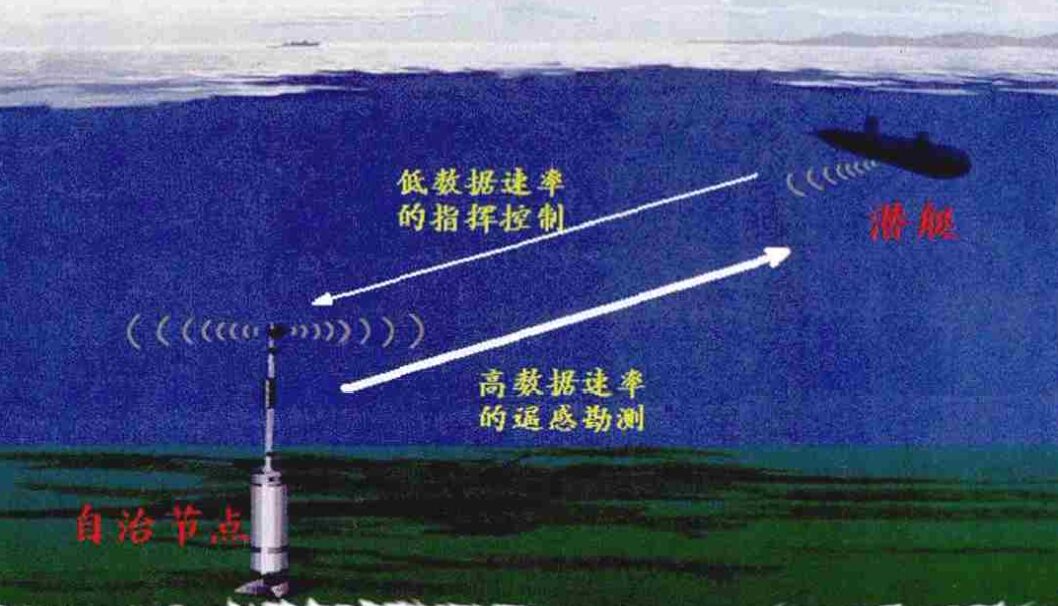
Asymmetric communication between underwater sensors and submarines
Currently, among the projects being implemented by the US Navy, typical underwater sensor networks include the “Seaweb” acoustic network, autonomous distributed sensor systems, and the “Near-Shore Underwater Persistent Surveillance Network.” Among these, “Seaweb” is the most successful acoustic network and the largest practical underwater acoustic network under development by the US Navy.
“Seaweb” is constructed under the leadership of the US Navy Research Laboratory and the Space and Naval Warfare Systems Command, utilizing underwater acoustic modems for communication and can also serve as a dual-use network. It is regarded as the underwater version of the “military network” and is a product of interdisciplinary research and applications in underwater propagation, sonar system engineering, digital communication, signal processing, computer network engineering, transducer design, and more. For military use, it constructs deployable autonomous distributed sensors for surveillance, anti-submarine warfare, and mine countermeasure systems, implementing command, control, communication, and navigation functions; for civilian use, it establishes a telemetry front-line observation network for monitoring the continental shelf and a meteorological ocean system. They all use long-range sonar as the tool for underwater communication, constituting an underwater network based on the concept of “Seaweb,” but different types of underwater sensors are used based on application needs.
Essentially, “Seaweb” is a fixed node underwater wide-area network composed of distributed autonomous sensors, with mobile nodes operating around this fixed underwater wide-area network grid to execute combat missions, acquiring navigation information and conducting underwater communication through these fixed nodes (sensor nodes and acoustic relay nodes). “Seaweb” connects fixed nodes, mobile nodes, and gateway nodes (including fixed buoy gateway nodes and mobile gateway nodes) through underwater acoustic communication links. The control center is deployed on vessels, submarines, aircraft, or land-based centers, and it accesses buoy gateway nodes through satellite links or terrestrial local area networks. Gateway nodes have both underwater acoustic communication interfaces and wireless communication interfaces, the former used for establishing underwater communication links with “Seaweb,” and the latter for providing wireless links between “Seaweb” and land, aircraft, or satellites. Mobile gateway nodes collect data from sensor nodes during underwater movements and then surface at appropriate times to communicate wirelessly with land-based or ship-based control centers. Submarines access “Seaweb” network resources or communicate with remote buoy gateways through underwater acoustic communication links while submerged. Remote control centers access buoy gateway nodes through satellite links or terrestrial local area networks. Currently, “Seaweb” possesses strong self-organization capabilities, such as automatic node identification, clock synchronization, node location, adaptive transmission power control, node updates, and network reconfiguration after failures.

Unmanned underwater vehicles like “Bluefin Tuna” can also serve as nodes in the sensor network
The US Navy’s “Seaweb” program initiated annual “Seaweb” experiments starting in 1998, aimed at promoting the development of long-range sonar and “Seaweb” technology. The testing process of “Seaweb” also represents the evolution of underwater sensor networks from providing basic communication functions to constructing underwater wireless networks, multi-path access structures, and adopting composite communication protocols to achieve advanced service functions.
From the technical details of the experiments, “Seaweb” can support data packets of 2000 bytes in length and a communication rate of 2400 bits per second. However, to improve network performance and battery life, a data packet length of 350 bytes is adopted, with a nominal rate of 800 bits per second. The commonly used bandwidth is 9000-14000 Hz, with a maximum communication distance of 10 kilometers and a deployment depth of less than 1000 meters.
Under the control of the “Seaweb” server and main control nodes, the deployment of “Seaweb” goes through four phases, including preparation phase, with the main task of analyzing task requirements and designing network distribution models; installation and activation phase, which mainly tests and activates network nodes; system initialization and registration phase, which mainly obtains network link information and main node data; optimization and operation phase, which mainly selects network routes, specifies protocols, and optimizes node performance.
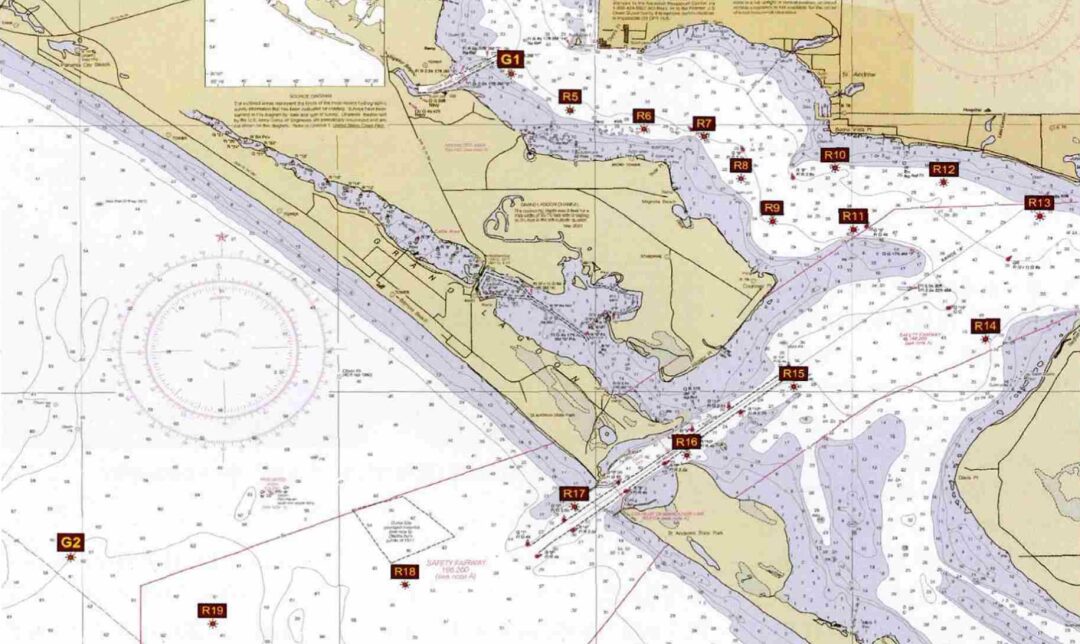
Deployment diagram of “Seaweb” network nodes in 2005
The “US Navy Information Dominance Roadmap (2013-2028)” emphasizes the construction of underwater data communication capabilities to achieve more precise underwater positioning and navigation as a crucial capability to ensure successful completion of positioning, navigation, and timing tasks at sea, winning future maritime battles. The underwater network system developed according to the concept of network-centric warfare organically connects various combat platforms and information nodes through underwater data links, achieving a high level of shared situational awareness in the underwater battlefield, enabling rapid command of preemptive actions and troop maneuvers, thereby greatly enhancing joint combat effectiveness.
Although existing research results have proven the feasibility of underwater network communication and its role as a force multiplier for the US military’s underwater combat capabilities, it is undeniable that the current application results are merely the tip of the iceberg of the entire architecture. There are still many obstacles on the road to underwater sensor network research, and numerous significant technical challenges and corresponding issues need to be resolved.






