As the Spring Festival Gala, which has been heavily criticized in history, this year’s program was not visually appealing, but the robots dancing with Sun Nan performed quite well (Robot’s inner thought: Who dares to compare with me in terms of uniformity)! This Alpha robot is said to have been developed and produced by a company in Shenzhen.
Of course, the role of robots goes far beyond dancing; medical robots, as rapidly developing intelligent medical devices, are increasingly gaining attention.
Presenter / Gao Tejia Securities Fund Department Zhang Yanzhao
Medical robot technology is a new interdisciplinary research field that integrates various disciplines such as medicine, biomechanics, mechanics, engineering control, robotics, materials science, computer graphics, computer vision, and mathematical analysis.,Medical robots are mainly used in the rescue, transportation, surgery, and rehabilitation of injured patients,and are one of the important development directions for the informatization and intelligence of medical and health equipment, currently a hot research topic in the field ofrobots.
Depending on their use,medical robots are divided into four categories: surgical robots, rehabilitation robots, nursing robots, and other medical robots.
Surgical Robots:From Industrial Robots to Da Vinci Robots
In 1985, the first surgical robot based on an industrial robot platform appeared. Y. S. Kwoh and others from the USA used the PumaS60 industrial robot to guide the probe for brain tissue biopsy, improving the precision of neurosurgical biopsies.
In 1989, the Robotics Technology Center at Imperial College London utilized an improved Prima robot with six degrees of freedom to perform a prostatectomy, significantly shortening the operation time. This device eventually evolved into a specialized device for transurethral resection of the prostate.
At the same time, Sacramento CA’s Joint Surgical Equipment Company invented a robot that was used for precise adjustment of the femur in joint replacement surgery, becoming the first surgical robot to receive FDA certification.
These early medical robot systems all utilized industrial robot platforms, completing surgical operations through technical modifications of industrial robots.
Dedicated surgical robots emerged in the early 1990s.
In 1994, the FDA officially approved the first-generation AESOP (automated endoscopic system for optimal positioning) system invented by R. Herding’s research team for laparoscopic surgery.
The AESOP system has six degrees of freedom, allowing surgeons to control it simultaneously with their hands and feet. Through the laparoscope, doctors can observe images throughout the abdominal cavity. Compared to human holders, robotic holders provide more stable images with lower unconscious movement frequency.
In 1996, the American company Computer Motion launched the AESOP2000 system, a medical robot that could be used for minimally invasive surgery. It has seven degrees of freedom, mimicking the posture and function of human arms, effectively assisting doctors in grasping and operating endoscopic equipment, widely used in various surgical procedures such as cardiac, thoracic, and spinal surgeries. The company was later acquired by Intuitive Surgical.
In 1997, Intuitive Surgical launched the “Da Vinci” surgical system, composed of a surgeon control console, multifunctional surgical bed, various surgical instruments, and image processing equipment. Surgeons operate the robot’s movements from the control console and use foot pedals to control the high-quality visual system.
 The “Da Vinci” system has three robotic arms and one endoscopic arm, allowing for a magnification of over 1000 times in the surgical field, while eliminating the physiological tremors of the surgeon’s hands, significantly enhancing surgical precision, preventing fatigue, enabling fine operations, and facilitating remote robotic surgery.
The “Da Vinci” system has three robotic arms and one endoscopic arm, allowing for a magnification of over 1000 times in the surgical field, while eliminating the physiological tremors of the surgeon’s hands, significantly enhancing surgical precision, preventing fatigue, enabling fine operations, and facilitating remote robotic surgery.
Intuitive Surgical was established in 1995 and further developed the Da Vinci system in collaboration with IBM, MIT, and Heartport.
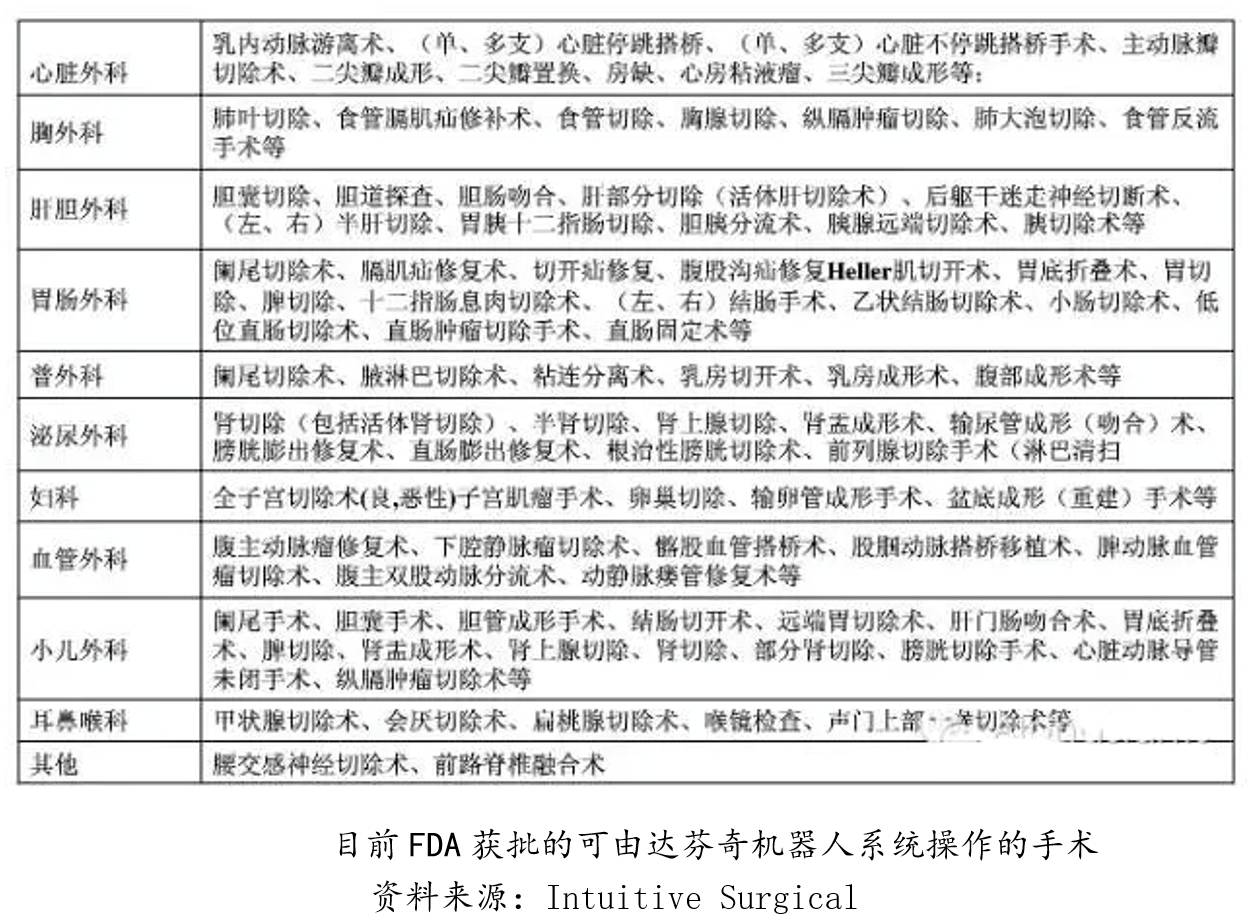
The FDA has already approved the Da Vinci robotic surgical system for use in general surgery, thoracic surgery, urology, gynecology, head and neck surgery, and cardiac surgery for both adults and children. The company went public on NASDAQ in 2000 and began to turn a profit in 2004. Its stock price soared from less than $10 at its IPO to currently $538, an increase of over 50 times. As of February 15, 2016, Intuitive Surgical’s market capitalization reached $20 billion, equivalent to more than 130 billion RMB.
In 2014, a total of 431 Da Vinci systems were sold, compared to 546 units in 2013. As of December 31, 2014, there were 3266 Da Vinci systems worldwide, with 2223 in the USA, 549 in Europe, 193 in Japan, and 301 in other regions.
As of the end of 2014, there were a total of 3266 Da Vinci robots installed globally, including 2223 in the USA, 549 in Europe, 350 in Asia, with 34 units in mainland China, 9 in Beijing, and the rest distributed in hospitals in Shanghai, Hangzhou, Guangzhou, etc.
Virtual Surgical Robots / Remote Surgical Systems
Virtual surgical procedures have developed based on robotic remote operation technology. Virtual surgical robot technology combines robotic-assisted surgical systems with virtual reality (VR) technology, allowing operators to control the surgical robot at the site from a distance through a remote operation system.
In 2001, doctors from France and the USA completed the world’s first surgery assisted by a robot that crossed the Atlantic Ocean. Due to the time lag in remote communication (less than 1 second), the success of the surgery was significant.Remote surgical systems can now be applied to more complex surgeries, such as cardiac surgery, and remote communication technology can also provide a means for medical training.
Medical teaching robots are ideal teaching tools based on virtual reality technology, allowing trainees to have visual and tactile intuitive experiences. For example, the Noel teaching robot in the USA can simulate a pregnant woman about to give birth, even speaking and screaming.
Small Modular Robot Technology
In the 21st century, influenced by minimally invasive surgery, medical robots are showing trends of miniaturization, modularization, and even human-installable designs.
Micro modular robots were first applied to assist in improving traditional endoscopic examinations.In 1999, Dario and others used semi-automated micro robots to improve conventional colonoscopy, showing that this technology not only made colonoscopy more reliable but also provided a reference for its application in intraluminal diagnosis and treatment.
In 2003, the German Robotics and Embedded Systems Research Center and the Munich University of Technology’s Heart Treatment Center began joint development of a minimally invasive robotic system for cardiac surgery, using a master-slave operation mode, with the master (doctor side) being the force feedback system from the USA’s SensAble Technology; the slave (patient side) being an 8-degree-of-freedom robotic arm capable of performing cannula operations.
The fixture is equipped with force sensors to detect forces in three directions from the tool’s central axis, which are then fed back to the doctor.
In recent years, some foreign research institutions have been keen on developing small surgical robot systems.
In 2004, Johns Hopkins University developed a laryngeal surgical robot with a diameter of 4 mm, capable of exerting a force greater than 1 Newton.It has multiple degrees of freedom and uses master-slave operation to perform surgical operations in the throat. Its slave side consists of a 4-degree-of-freedom parallel fixation device and a 7-degree-of-freedom serpentine mechanism, using push-pull high-elastic tubes to achieve bending motions in any direction.
In 2009, Columbia University’s ARMA (advanced robotics and mechanism applications) laboratory developed a single-port dual-arm operating robot, composed of multi-degree-of-freedom serpentine joints, with an end tool outer diameter of 15 mm, including binocular cavity access and two independent serpentine operating arms, each capable of performing surgical actions within its workspace.
In early 2012, B. Hannaford from the University of Washington and J. Rosen from the University of California, Santa Cruz, distributed a batch of medical robots with bird-wing-like mechanical arms to several universities across the USA. This robot was named “Crow,” its prototype was developed by Hannaford and Rosen for the US military as a battlefield surgical robot in 2005.
Compared to the “Da Vinci” robotic system, the “Crow” is compact, smaller in size, with more dexterous mechanical hands and a lower price. It is also the first surgical robot to use open-source code, allowing users to modify the code as needed to connect with other specific devices.
Rehabilitation Robots
Rehabilitation robots are divided into rehabilitation training robots and assistive rehabilitation robots.Rehabilitation training robots primarily help patients complete various functional recovery training, such as walking training, arm movement training, spinal movement training, neck movement training, etc.; assistive rehabilitation robots mainly help patients with mobility difficulties complete various actions, such as robotic wheelchairs, guiding canes, robotic prosthetics, and robotic nurses.
Rehabilitation mechanical hands and smart wheelchairs are common rehabilitation robots. Rehabilitation mechanical hands can partially or fully restore the operational capabilities lost by disabled individuals, helping them establish connections with their surrounding environment. Depending on the installation location, rehabilitation mechanical hands can be divided into desktop mechanical hands, wheelchair mechanical hands, and self-operated mechanical hands.
In 1987, British M. Topping developed the Handy rehabilitation robot prototype, a desktop mechanical hand that helped an 11-year-old boy with cerebral palsy to eat independently for the first time.Subsequently, Topping modified the human-machine interface of the prototype and developed supporting devices to meet more uses, thus making Handy the most successful rehabilitation robot in history.
To address the mobility issues of the elderly and disabled, the UK successfully developed intelligent wheelchairs based on electric wheelchairs in 1986.Intelligent wheelchairs are highly automated mobile robots, capable of being driven by human thought without physical contact. They generally consist of an environmental perception and navigation system, motion control and energy systems, and human-machine interfaces, integrating advanced technologies such as mechanism design, sensing technology, machine vision, robot navigation and positioning, pattern recognition, information processing, and human-computer interaction.
Nursing Robots
Nursing robots are semi-autonomous or fully autonomous robots used to alleviate the heavy and trivial nursing work of medical staff, such as confirming patients’ identities, checking patients’ temperatures, accurately distributing required medications, transporting and escorting patients, cleaning wards, and even transmitting video to help doctors understand patients’ conditions in a timely manner.
 The medical porter model developed by the RIKEN Bio-Simulation Control Research Center in Nagoya, Japan.
The medical porter model developed by the RIKEN Bio-Simulation Control Research Center in Nagoya, Japan.
The nursing robot MELKONG developed by the Japan Mechanical Engineering Research Institute can easily and smoothly lift patients from beds and transport them to bathrooms, showers, dining rooms, or functional examination departments.
The help-mate robot developed by the American Transportation Research Institute can not only complete point-to-point delivery of food and medicines in hospitals 24 hours a day but also autonomously walk based on sensors and path planning algorithms, detecting and avoiding obstacles, and is currently in practical use in several hospitals.
The PAM robot from the UK can be used to move or transport paralyzed and mobility-impaired patients.
The nursing robot developed by three research groups from the RIKEN Center for Life Technology Control in Japan not only has vision, hearing, and smell but can also transport and care for the elderly.
Other Medical Robots
Other medical robots refer to robots with medical properties that are not used in clinical applications, such as rescue robots and medical teaching robots.
Rescue robots mainly undertake rescue work under dangerous conditions (earthquakes, fires, battlefields, etc.), requiring them to quickly and safely rescue the injured.
Due to the complex and dangerous working environment, rescue robots possess characteristics such as simple and compact structure, agile movement, low energy consumption, obstacle avoidance, and autonomous navigation. Rescue robots integrate multiple sensors and can determine whether the injured have vital signs and make correct choices without human commands and guidance.
In 2003, the International Rescue System Research Institute, funded by the Japanese government, developed a batch of rescue robots capable of crawling and jumping on debris, equipped with short-wave cameras and sensors. The scope of other medical robots is continuously expanding.

The adorable bear rescue robot (image from the internet)
Current Status of Surgical Robot Applications and Development in China
In the past decade, some universities and hospitals in China have achieved a series of results in the research and application of surgical robots.
In 2001, Beihang University, Tsinghua University, and the Navy General Hospital collaborated to develop a frameless directional neurosurgical system based on brain surgery robots, completing thousands of operations to date.
In 2010, Beihang University and Jishuitan Hospital collaborated to produce China’s first medical robot with completely independent intellectual property rights, the “Orthopedic Navigation Robot” (the predecessor of Tianzhihang company), which obtained national medical device registration approval and has been applied in clinical treatment. This robot stands 1 meter tall and has two movable robotic arms. Doctors place guide pins and hollow screws on the robotic arms, which automatically adjust their position and angle according to computer instructions, allowing doctors to plan the surgery based on the patient’s electronic 3D images before the operation.
Every year, patients in China suffer from femoral head necrosis due to failed femoral surgeries, leading to paralysis or death. Using this orthopedic navigation robot, the average number of X-ray images taken during surgery is 14.9, more than 30 fewer than traditional surgical methods, with an implantation accuracy of within 1.5 mm and a success rate of 100%.
In 2002, Tianjin University, Nankai University, and Tianjin Hospital collaborated to develop a robot-assisted microsurgery system.
In 2004, Tianjin University successfully developed the “Miracle Hand” system, a surgical robot for microsurgery, and collaborated with the Paris VI University’s robotics laboratory to develop a minimally invasive surgical robot system, conducting animal research on pig hearts.
In 2006, Tianjin University developed the “Miracle Hand II” minimally invasive surgical robot system based on the “Miracle Hand” robot, which has three degrees of freedom and a diameter of only 4 mm. In March of the same year, “Miracle Hand II” successfully performed a pig vocal cord resection with the support of a laryngoscope.
In 2004, Harbin Institute of Technology successfully developed a robot-assisted orthopedic surgery system and completed clinical surgeries on cadaver specimens. Currently, Harbin Institute of Technology has successfully developed various surgical robots, including minimally invasive orthopedic surgery robots, minimally invasive endoscopic operation robots, and interventional surgical robots. Surgical robots developed in collaboration with the General Hospital of the PLA have performed multiple animal gallbladder and kidney removals and passed the acceptance of relevant national science and technology departments.