1. Definition of Filter
A filter is an electrical component used to reduce or eliminate interference by processing the input signal to obtain the desired signal. It effectively filters out frequency signals at specific frequency points or outside of those frequency points, thereby achieving the function of eliminating interference and obtaining a specific frequency signal.
2. Classification of Filters
Based on the form of the signal being processed, filters can be divided into analog filters and digital filters.
Analog Filters
Analog filters consist of electrical components such as resistors, capacitors, inductors, and operational amplifiers, and are used to filter analog signals.
Digital Filters
Digital filters process discretized digital signals using software or digital signal processors. By performing operations on digital signals, they modify the signal spectrum and complete filtering functions through algorithms or devices, which can be divided into precision filters and modern filters.
Digital filters can be classified into Infinite Impulse Response (IIR) filters and Finite Impulse Response (FIR) filters based on their network structure or unit impulse response.
Classic Filters
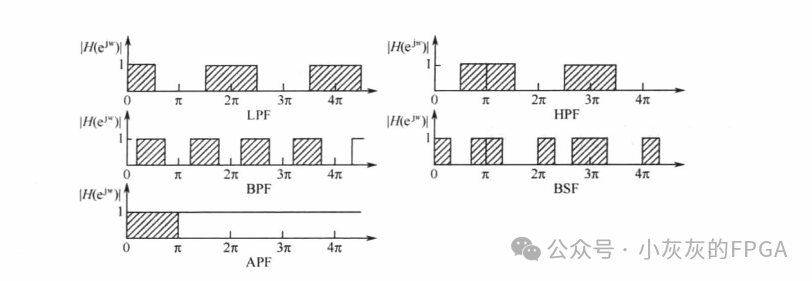
Classic filters assume that the effective signal and noise signal in the input signal x(n) are distributed across different frequency bands. When x(n) passes through a linear filtering system, it can effectively reduce or eliminate noise components. Classic filters mainly include Low Pass Filter (LPF), High Pass Filter (HPF), Band Pass Filter (BPF), Band Stop Filter (BSF), and All Pass Filter (APF).
Modern Filters
Modern filters estimate certain characteristics of the signal or the signal itself from data recordings (time series) that contain noise. Both signal and noise are treated as random signals, utilizing statistical properties (autocorrelation function, power spectrum function) to derive a set of optimal estimation algorithms, which are then implemented using hardware or software. This includes Wiener Filter, Kalman Filter, Linear Filter, and Adaptive Filter.
FIR and IIR Filters
Both FIR and IIR filters process signals in time series to achieve the function of filtering out interference and obtaining useful signals.
The difference between FIR and IIR lies in the structure of their system functions.
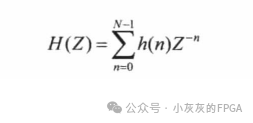
The system function of FIR has a strict linear phase characteristic and does not have feedback from output to input.
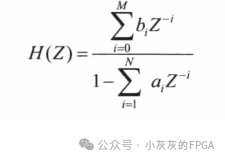
The system function of IIR cannot achieve linear phase characteristics, and its frequency selectivity is better but the phase non-linearity is more severe, with feedback from output to input.
Characteristic Parameters of Filters
To design a realizable filter that approximates the performance of an ideal filter as closely as possible, it is necessary to consider characteristic parameters.
Taking the Low Pass Filter as an example, the passband cutoff frequency is ωp, the passband tolerance is α1, the stopband cutoff frequency is ωs, and the stopband tolerance is α2.
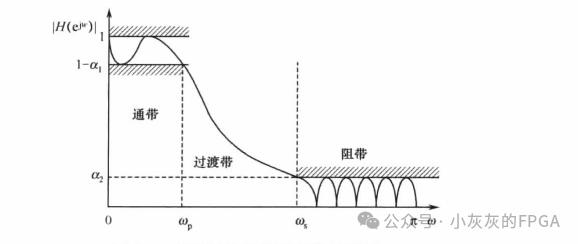
The passband is defined as |ω|≤ ωp, 1-α1≤|H(e^(jω))|≤1
The stopband is defined as ωs≤|ω|≤ π, |H(e^(jω))|≤α2
The transition band is defined as ωp≤|ω|≤ ωs
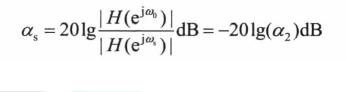
The allowed attenuation in the passband and stopband is expressed in dB.
The maximum allowable attenuation in the passband is αp.
The maximum allowable attenuation in the stopband is αs.