
1. RW6The robot can only jog in manual mode using the teach pendant (or through Webservice1.0 to jog the robot, but the teach pendant must be manually enabled continuously)
2. RW6If you want to jog the robot from the PC, you typically writeMoveL commands in RAPID and control the variables from the PC for pseudo jogging the robot.
3. The main difference between jogging the robot and MoveL is that during jogging, the controller only sends velocity commands, meaning no position planning is done. In contrast, MoveL involves complete path planning. Using MoveL with frequent start and stop can cause jitter.
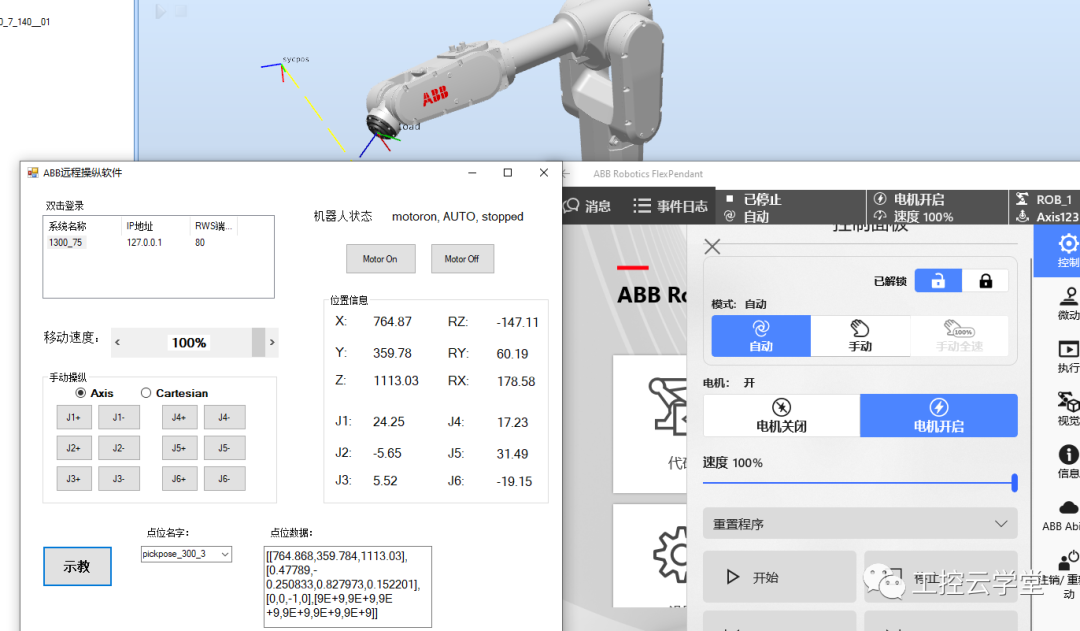
4. For RW7 robots (IRB1100,IRB1300,IRB920, etc.), based onWebService2.0, a jog interface in automatic mode and a teaching function for const attribute points is provided (under RW6,PCSDK can only modifyPERS or var storage type point data)
5. Based onWebService2.0,ABB launched theRobot Control Mate (RCM) Robot Studio plugin and web version, and also provides an SDK dll that can be used in C#.
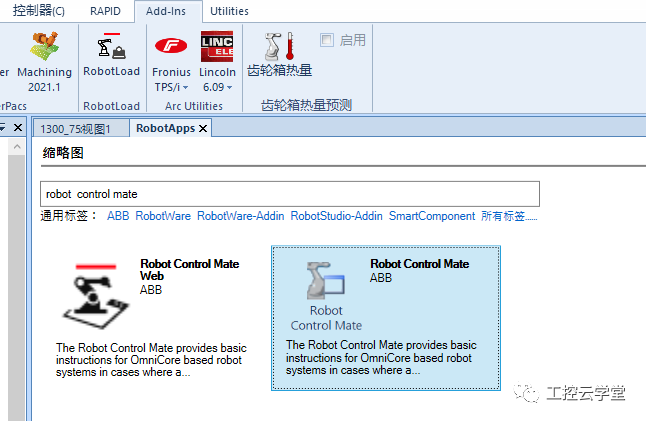
6. In Robot Studio, search for the add-inrobot control mate(1.4) and install it.
7. After installation, the followingSDK documentation and dll will be in the installation directoryRobot Studio-SDK. You can use the documentation accordingly.
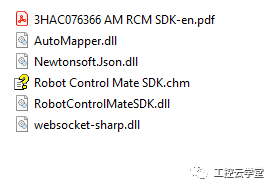
8. Add the dll from the SDK to your C# project, and add the following references:
using RobotControlMate.Core;
using RobotControlMate.Interface;
using RobotControlMate.Implementation;
using RobotControlMate.Models;
9. You can add the following code in the initialization section:
private WorkContext _workContext = new WorkContext();
private static int _port;
ControlService controlService;
IJogService jogService;
var ip =”127.0.0.1″;
_port = 80;
_workContext.Connect(ip, _port, true);
controlService = new ControlService(_workContext);
jogService = new JogService(_workContext); PCJogSDK.Implementation.DataStore.GetLocalKeyBy(_workContext.ControllerName);
//Get local permissions
jogService.SetJogMode(JogMode.Cartesian);
//Set jogging mode to Cartesian space
10. In the button’s MouseDown event:
int[] speed = new int[6] { 50, 0, 0, 0, 0, 0 };
jogService.StartJogging(speed);
//Move according to the current jogging mode (joint or cart)
11. In the button’s MouseUp:
jogService.StopJogging();
12. Use the following code to record the current position top300
teachService = new TeachService(_workContext);
teachService.TeachRobTarget(“p300”,”T_ROB1”,”module1”);
How to Become an Excellent Industrial Robot Engineer?
Scan the code for consultation
▼
Teacher Zuo: 18073180632 (same as WeChat)
