

Last week we gave away Raspberry Pi Pico, and today we have prepared some experimental routines for everyone. This includes several basic experiments with code and results.
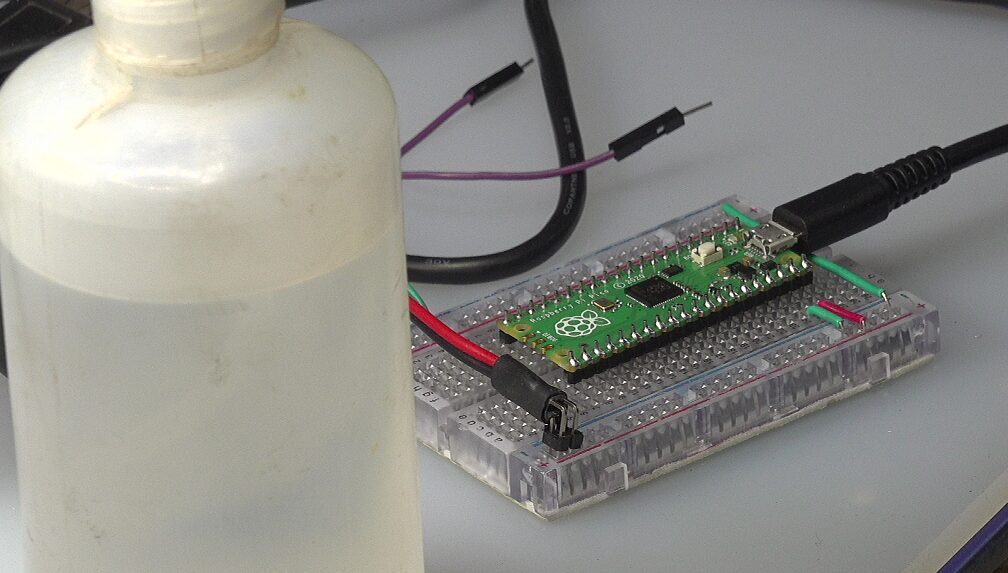
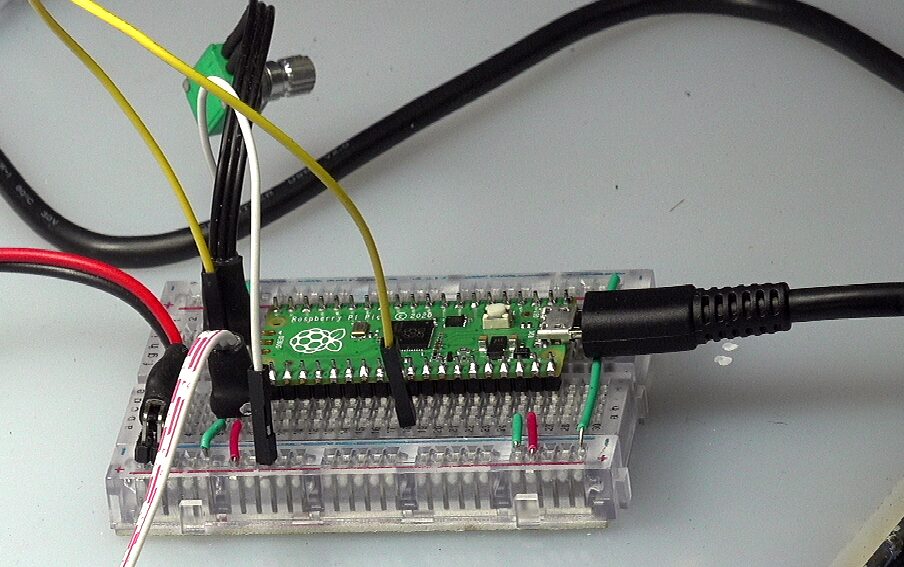
▌01 PI Pico Experiment Board
▌02 Basic Tests
1. Flash LED on Board
from machine import Pin,Timer
from time import sleep_us
led = Pin(25, Pin.OUT)
tim = Timer()
print("Flash LED.")
def tick(timer):
global led
led.toggle()
tim.init(freq=2, mode=Timer.PERIODIC, callback=tick)
▲ Experimental circuit board
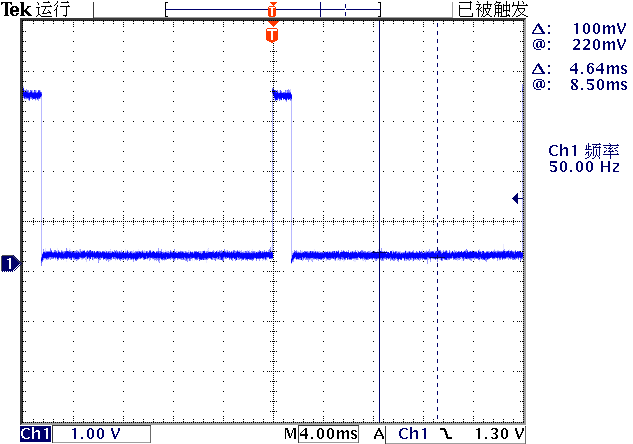
2. UART
(1) Test Program
from machine import UART,Pin,Timer
from time import sleep_us
uart = UART(0, baudrate=115200, tx=Pin(0), rx=Pin(1), bits=8, parity=None, stop=1)
led = Pin(25, Pin.OUT)
tim = Timer()
print("Send UART.")
def tick(timer):
global uart, led
led.toggle()
uart.write(b'\x55')
tim.init(freq=10, mode=Timer.PERIODIC, callback=tick)
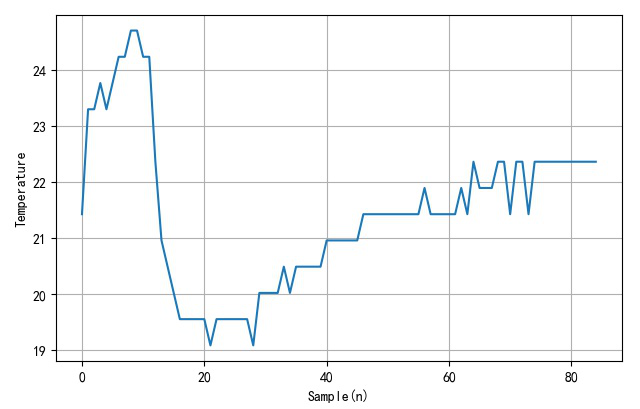
3. ADC
import machine
import utime
sensor_temp = machine.ADC(4)
conversion_factor = 3.3/(65535)
while True:
read = sensor_temp.read_u16() * conversion_factor
temperature = 27 - (read - 0.706) / 0.001721
print(temperature)
utime.sleep(2)
4. PWM
(1) PWM Driving LED
from machine import Pin,PWM
import time
pwm = PWM(Pin(25))
pwm.freq(1000)
duty = 0
direction = 1
for _ in range(16*255):
duty += direction
if duty > 255:
duty = 255
direction = -1
elif duty < 0:
duty = 0
direction = 1
pwm.duty_u16(duty*duty)
time.sleep(0.001)
(2) PWM Driving Servo
from machine import Pin,PWM
import time
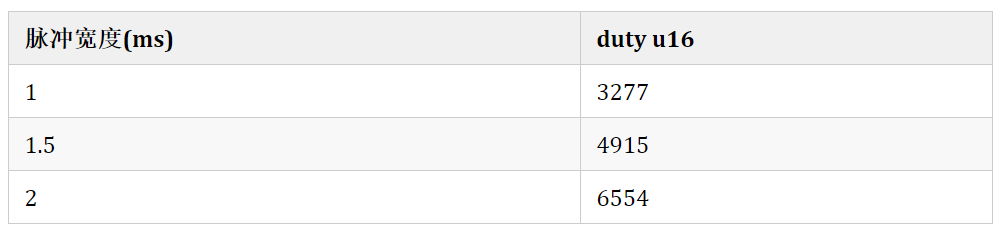
pwm = PWM(Pin(15))
pwm.freq(50)
pwm.duty_u16(4915)
-
Brown: GND -
Red: +4.5 ~ +6V -
Yellow: Command pulse signal
from machine import Pin,PWM
import time
pwm = PWM(Pin(16))
pwm.freq(50)
for _ in range(100):
pwm.duty_u16(3276)
print("Out pulse width : 1ms")
time.sleep(1)
print("Out pulse with : 2ms.")
pwm.duty_u16(6553)
time.sleep(1)
(3) PWM+ADC Experiment
from machine import Pin,PWM
import time
pwm = PWM(Pin(16))
pwm.freq(50)
control = machine.ADC(0)
for _ in range(1000):
adc = control.read_u16()
duty = int(adc * (6553-3276)/0xffff) + 3276
pwm.duty_u16(duty)
time.sleep(0.1)
5. Interrupt IRQ
from machine import Pin
p2 = Pin(2, Pin.IN, Pin.PULL_UP)
p2.irq(lambda pin:print("IRQ with flag:",
pin.irq().flags()),
Pin.IRQ_FALLING)
03▌Conclusion


Last week’s event, we gave away some Raspberry Pi Pico, come and see the lucky draw!
References
https://zhuoqing.blog.csdn.net/article/details/114037888
[2] Installing Thonny Development Environment:

1
Free to grab the Programmer’s Guide to Embedded Systems
2
Did not expect Linux commands could be played like this!
3
Programmers should also jump higher? A god-level job-hopping strategy is given to you.



