At the depths of the Mariana Trench, where the pressure is equivalent to a one-ton rhinoceros standing on a fingernail and the temperature approaches freezing, deep-sea robots that could reach this area were mostly large rigid submersibles weighing several tons. For small robots under one meter in length, the extreme environment here was once a “forbidden zone,” causing them to become “muscle rigid” and struggle to move.
 In 2021, Beihang University released a robot in the Mariana Trench (10,666m). Now, a “little sprite” measuring less than 50 centimeters and weighing only 1500 grams has arrived, moving effortlessly under high hydrostatic pressure in the deep sea. With a sleek form and agile movements, it sometimes swings its tail fin like a swimming fish, sometimes spreads its dorsal fin like a sea swallow gliding, and can even transform its tail fin into legs to “walk” along the seabed.
In 2021, Beihang University released a robot in the Mariana Trench (10,666m). Now, a “little sprite” measuring less than 50 centimeters and weighing only 1500 grams has arrived, moving effortlessly under high hydrostatic pressure in the deep sea. With a sleek form and agile movements, it sometimes swings its tail fin like a swimming fish, sometimes spreads its dorsal fin like a sea swallow gliding, and can even transform its tail fin into legs to “walk” along the seabed.
 The robot crawling on the seabedThis miniature deep-sea multimodal robot was developed by a research team from the School of Mechanical Engineering and Automation at Beihang University in collaboration with the Institute of Deep-Sea Science and Engineering of the Chinese Academy of Sciences and Zhejiang University, after six years of joint research. The related research results were published in the prestigious international journal Science Robotics under the title “Miniature deep-sea morphable robot with multimodal locomotion”, and were also featured on the homepage of Science Robotics.
The robot crawling on the seabedThis miniature deep-sea multimodal robot was developed by a research team from the School of Mechanical Engineering and Automation at Beihang University in collaboration with the Institute of Deep-Sea Science and Engineering of the Chinese Academy of Sciences and Zhejiang University, after six years of joint research. The related research results were published in the prestigious international journal Science Robotics under the title “Miniature deep-sea morphable robot with multimodal locomotion”, and were also featured on the homepage of Science Robotics.
 Screenshot of the paper’s homepageOverview video of the resultsThe research team drew inspiration from the movement patterns of batfish to design a multimodal robot capable of swimming, gliding, and crawling, utilizing chiral bistable metamaterial structures to achieve rapid transitions between swimming and walking within 0.75 seconds, adapting to different seabed terrains and task requirements.
Screenshot of the paper’s homepageOverview video of the resultsThe research team drew inspiration from the movement patterns of batfish to design a multimodal robot capable of swimming, gliding, and crawling, utilizing chiral bistable metamaterial structures to achieve rapid transitions between swimming and walking within 0.75 seconds, adapting to different seabed terrains and task requirements. The multimodal locomotion capability allows the robot to flexibly respond to various tasks in complex deep-sea environments.In swimming mode, the robot generates thrust through the swinging of its tail fin, achieving a maximum speed of 5.5 cm/s; in gliding mode, the expanded dorsal fin utilizes water lift for long-distance gliding; in crawling mode, the robot uses its anisotropic foot design to walk on sand at a speed of 3 cm/s.
The multimodal locomotion capability allows the robot to flexibly respond to various tasks in complex deep-sea environments.In swimming mode, the robot generates thrust through the swinging of its tail fin, achieving a maximum speed of 5.5 cm/s; in gliding mode, the expanded dorsal fin utilizes water lift for long-distance gliding; in crawling mode, the robot uses its anisotropic foot design to walk on sand at a speed of 3 cm/s.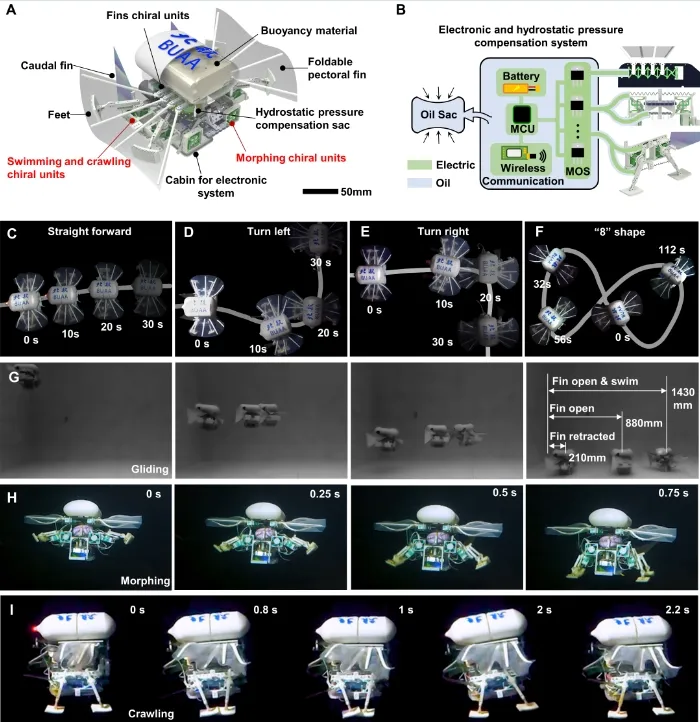 Under the high pressure of the deep sea, the modulus of the flexible actuator material increases, similar to the “stiffening” of muscles, which leads to a decay in the amplitude and speed of actuation, weakening the robot’s operational performance. To overcome this challenge, after multiple attempts, the research team designed a novel deep-sea actuation device: utilizing the rapid snap-through during the switching between two stable states of the bistable chiral metamaterial structure to achieve efficient actuation. The speed and amplitude of this rapid snap-through increase with the modulus of the structural material, cleverly turning the negative impact of deep-sea high pressure on soft materials into a positive effect, overcoming the performance decay of previous flexible material actuators in deep-sea environments.The research team innovatively developed a centimeter-scale deep-sea soft actuator. This actuator weighs only 16 grams and combines bistable chiral metamaterials with tube-sealed shape memory alloys (SMA). By utilizing the modulus increase caused by hydrostatic pressure, the bistable chiral unit achieves a higher rapid response speed, thereby enhancing the overall performance of the actuator.
Under the high pressure of the deep sea, the modulus of the flexible actuator material increases, similar to the “stiffening” of muscles, which leads to a decay in the amplitude and speed of actuation, weakening the robot’s operational performance. To overcome this challenge, after multiple attempts, the research team designed a novel deep-sea actuation device: utilizing the rapid snap-through during the switching between two stable states of the bistable chiral metamaterial structure to achieve efficient actuation. The speed and amplitude of this rapid snap-through increase with the modulus of the structural material, cleverly turning the negative impact of deep-sea high pressure on soft materials into a positive effect, overcoming the performance decay of previous flexible material actuators in deep-sea environments.The research team innovatively developed a centimeter-scale deep-sea soft actuator. This actuator weighs only 16 grams and combines bistable chiral metamaterials with tube-sealed shape memory alloys (SMA). By utilizing the modulus increase caused by hydrostatic pressure, the bistable chiral unit achieves a higher rapid response speed, thereby enhancing the overall performance of the actuator. The robot swimming, gliding, morphing, and crawling in the South China Sea’s seahorse cold spring (1384m)To address the challenge posed by the low temperatures of 2-4°C in deep-sea environments, the research team cleverly utilized shape memory alloys that can achieve high-frequency cyclic active deformation in low-temperature environments for antagonistic actuation. By utilizing the shape memory effect of shape memory alloys, a pair of shape memory alloy springs actively alternately contract through periodic current heating, driving the bistable metamaterial unit’s snap-through switching, thus achieving rapid cyclic oscillation of the actuator.Furthermore, through finite element simulation, laboratory environment testing, and high-pressure tank experiments, the team systematically optimized the key structural parameters of the actuator, ultimately achieving a positive reinforcement of the driving performance by hydrostatic pressure, significantly enhancing the oscillation speed and amplitude of the actuator. Finally, through packaging technologies such as silicone tubes filled with silicone oil and flexible oil bags, the pressure self-compensating packaging of the shape memory alloy actuator, circuit board, and energy system was realized.To verify the robot’s performance, the research team conducted field tests at multiple deep-sea locations. Over several years of testing, the robot was deployed 14 times in various terrains and full ocean depths, including the seahorse cold spring (1384m), Longxi Seamount (3756m), and the Mariana Trench (10666m), aboard the manned submersibles “Deep Sea Warrior” and “Striver.” Through practical deep-sea application tests, the research team comprehensively validated the motion capabilities and task execution abilities of the miniature deep-sea robot in extreme environments. These tests not only demonstrated the robot’s stable performance in high-pressure and low-temperature environments but also validated its adaptability and multifunctionality in complex seabed terrains.
The robot swimming, gliding, morphing, and crawling in the South China Sea’s seahorse cold spring (1384m)To address the challenge posed by the low temperatures of 2-4°C in deep-sea environments, the research team cleverly utilized shape memory alloys that can achieve high-frequency cyclic active deformation in low-temperature environments for antagonistic actuation. By utilizing the shape memory effect of shape memory alloys, a pair of shape memory alloy springs actively alternately contract through periodic current heating, driving the bistable metamaterial unit’s snap-through switching, thus achieving rapid cyclic oscillation of the actuator.Furthermore, through finite element simulation, laboratory environment testing, and high-pressure tank experiments, the team systematically optimized the key structural parameters of the actuator, ultimately achieving a positive reinforcement of the driving performance by hydrostatic pressure, significantly enhancing the oscillation speed and amplitude of the actuator. Finally, through packaging technologies such as silicone tubes filled with silicone oil and flexible oil bags, the pressure self-compensating packaging of the shape memory alloy actuator, circuit board, and energy system was realized.To verify the robot’s performance, the research team conducted field tests at multiple deep-sea locations. Over several years of testing, the robot was deployed 14 times in various terrains and full ocean depths, including the seahorse cold spring (1384m), Longxi Seamount (3756m), and the Mariana Trench (10666m), aboard the manned submersibles “Deep Sea Warrior” and “Striver.” Through practical deep-sea application tests, the research team comprehensively validated the motion capabilities and task execution abilities of the miniature deep-sea robot in extreme environments. These tests not only demonstrated the robot’s stable performance in high-pressure and low-temperature environments but also validated its adaptability and multifunctionality in complex seabed terrains.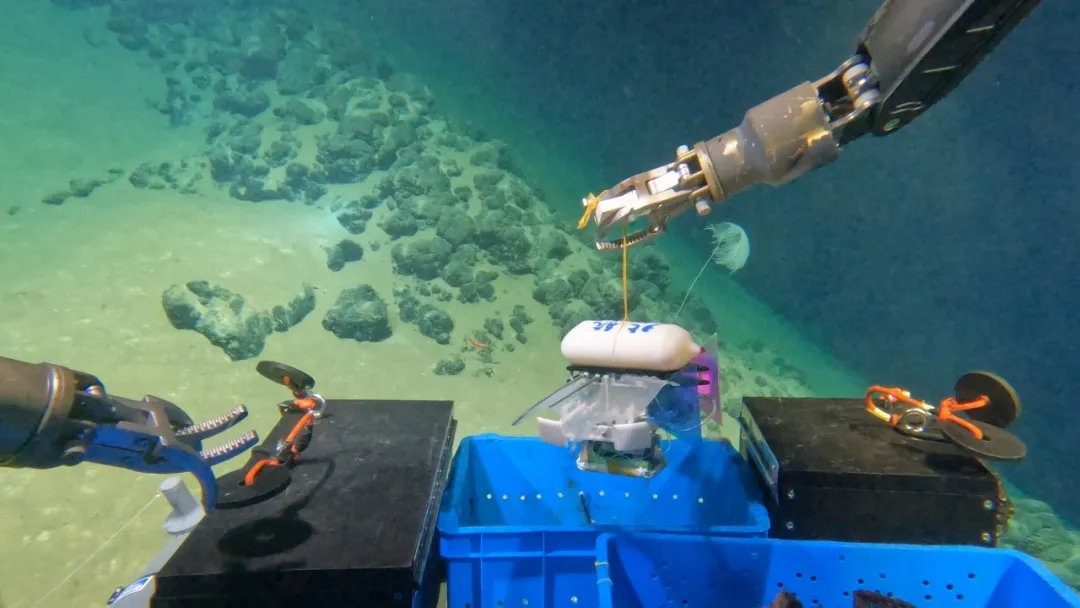 The robot testing in the South China Sea’s Zhongnan Seamount (3756m)To address the challenge of safely grasping soft-bodied organisms in the deep sea, the research team proposed a wearable deep-sea flexible gripper design method utilizing the pressure-twist coupling effect of the chiral metamaterial unit. This gripper was mounted on the manned submersibles “Striver” and “Deep Sea Warrior,” successfully completing a series of deep-sea tasks such as non-destructive grasping and sampling of soft marine organisms (starfish, sea cucumbers, sea urchins), moving ton-level landers, and opening containers at depths of 3400 meters.
The robot testing in the South China Sea’s Zhongnan Seamount (3756m)To address the challenge of safely grasping soft-bodied organisms in the deep sea, the research team proposed a wearable deep-sea flexible gripper design method utilizing the pressure-twist coupling effect of the chiral metamaterial unit. This gripper was mounted on the manned submersibles “Striver” and “Deep Sea Warrior,” successfully completing a series of deep-sea tasks such as non-destructive grasping and sampling of soft marine organisms (starfish, sea cucumbers, sea urchins), moving ton-level landers, and opening containers at depths of 3400 meters. Soft gripper using metamaterials grasping deep-sea starfish and sea cucumbers (3469m)Designed for the deep sea, robot design analysis and innovative breakthroughsIn the field of deep-sea exploration, the design of robots must not only cope with extreme high-pressure and low-temperature environments but also possess efficient motion capabilities and multifunctional operational performance. Overall, the research team developed a miniature deep-sea morphable robot with multimodal locomotion capabilities, consisting of actuators (chiral bistable units), morphing modules, multifunctional deep-sea grippers, and other components.
Soft gripper using metamaterials grasping deep-sea starfish and sea cucumbers (3469m)Designed for the deep sea, robot design analysis and innovative breakthroughsIn the field of deep-sea exploration, the design of robots must not only cope with extreme high-pressure and low-temperature environments but also possess efficient motion capabilities and multifunctional operational performance. Overall, the research team developed a miniature deep-sea morphable robot with multimodal locomotion capabilities, consisting of actuators (chiral bistable units), morphing modules, multifunctional deep-sea grippers, and other components.
- Actuator: The core drive of the miniature robot
Traditional soft actuators (such as dielectric elastomer actuators DEA, piezoelectric actuators, and magnetic actuators) experience performance degradation under high hydrostatic pressure in the deep sea due to increased Young’s modulus. To address this issue, the research team proposed a rapid response actuator design based on bistable elastic structures.The core of this actuator is a cavity-free bistable chiral unit, which has two stable states: left-handed and right-handed. By switching between these two states, the chiral unit can achieve rapid torsional response motion. Specifically, the chiral unit is formed from a pre-compressed soft structure with a cross shape, exhibiting a ±θstable torsional angle. By applying torsional loads, the unit can elastically switch between the two stable states. Under quasi-static loading, the unit’s reaction torque presents a typical N-shaped profile, triggering rapid response at the critical point where the torque changes from positive to negative.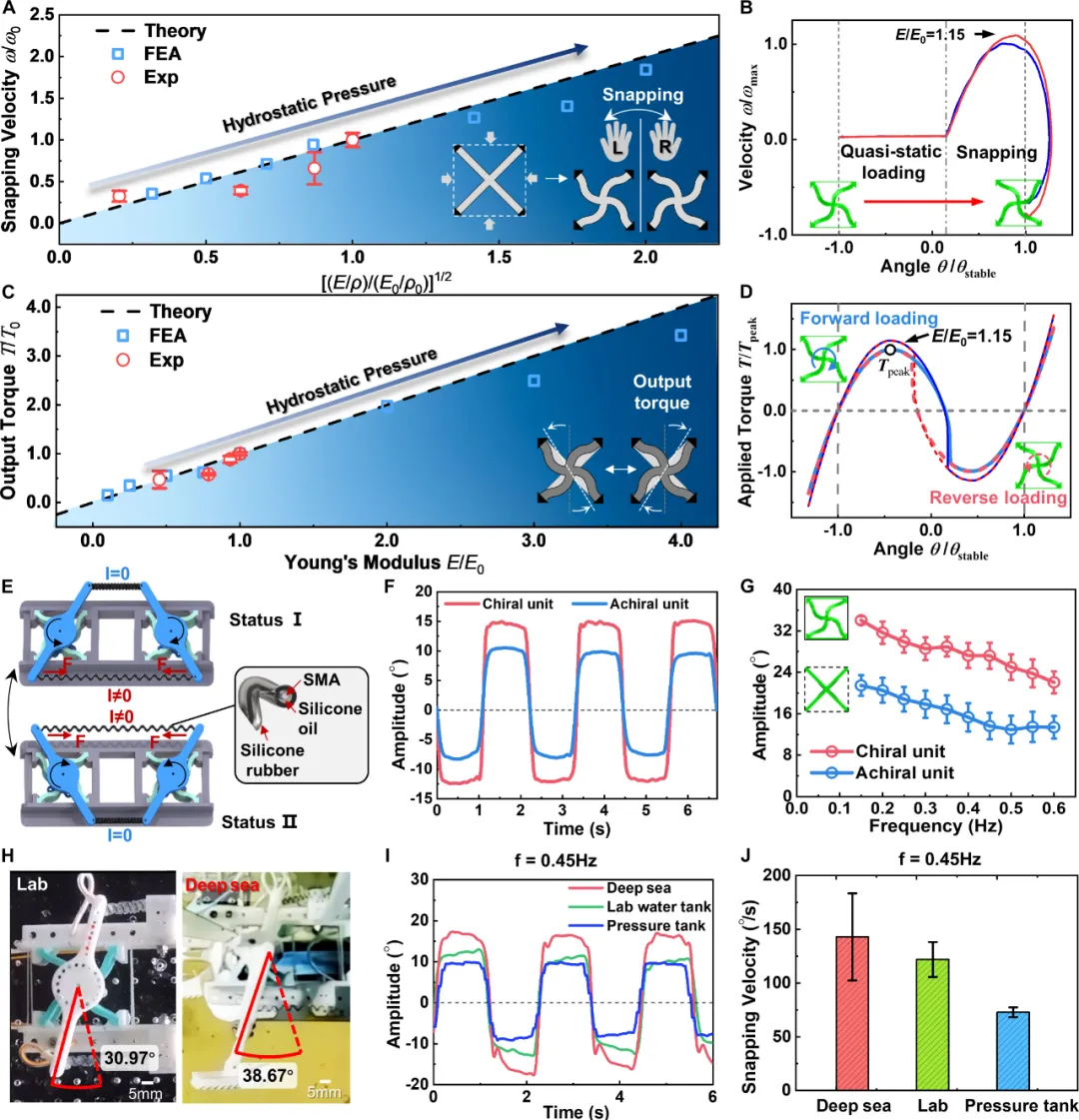 Deep-sea chiral drive moduleThe research team validated the effectiveness of this design through finite element analysis (FEA). At 120 MPa (equivalent to the hydrostatic pressure at a depth of 12,000 meters), the modulus of the soft material increased by 15.1%, while the maximum rapid response speed of the actuator improved by 8.50%, and the torsional amplitude increased by 1.68%. Additionally, the team adopted a tube-sealing method to encapsulate the shape memory alloy (SMA) springs in silicone tubes, ensuring their normal operation in deep-sea high-pressure environments.
Deep-sea chiral drive moduleThe research team validated the effectiveness of this design through finite element analysis (FEA). At 120 MPa (equivalent to the hydrostatic pressure at a depth of 12,000 meters), the modulus of the soft material increased by 15.1%, while the maximum rapid response speed of the actuator improved by 8.50%, and the torsional amplitude increased by 1.68%. Additionally, the team adopted a tube-sealing method to encapsulate the shape memory alloy (SMA) springs in silicone tubes, ensuring their normal operation in deep-sea high-pressure environments. Performance of the chiral drive module under different pressures in a pressure tank
Performance of the chiral drive module under different pressures in a pressure tank
- Morphing Module: Achieving multimodal locomotion performance
To enable rapid switching between swimming and crawling modes, the research team designed a morphing module.This module utilizes the two stable states of the chiral unit (with a 90° angle difference) to achieve morphological changes through compression-bending coupling. The tail fin and the two legs on the same side share a metamaterial actuation module, while the folding module retracts the gliding fin through the contraction of SMA springs.The propulsion module utilizes the rapid switching characteristics of the bistable unit to provide periodic paddling motion for the robot’s swimming and crawling modes. The robot is powered by a 2600 mA·hour lithium battery and controlled by an onboard microcontroller unit circuit. Experiments show that the robot can achieve a maximum swimming speed of 60.8 mm/s and a crawling speed of 31 mm/s in a laboratory aquarium.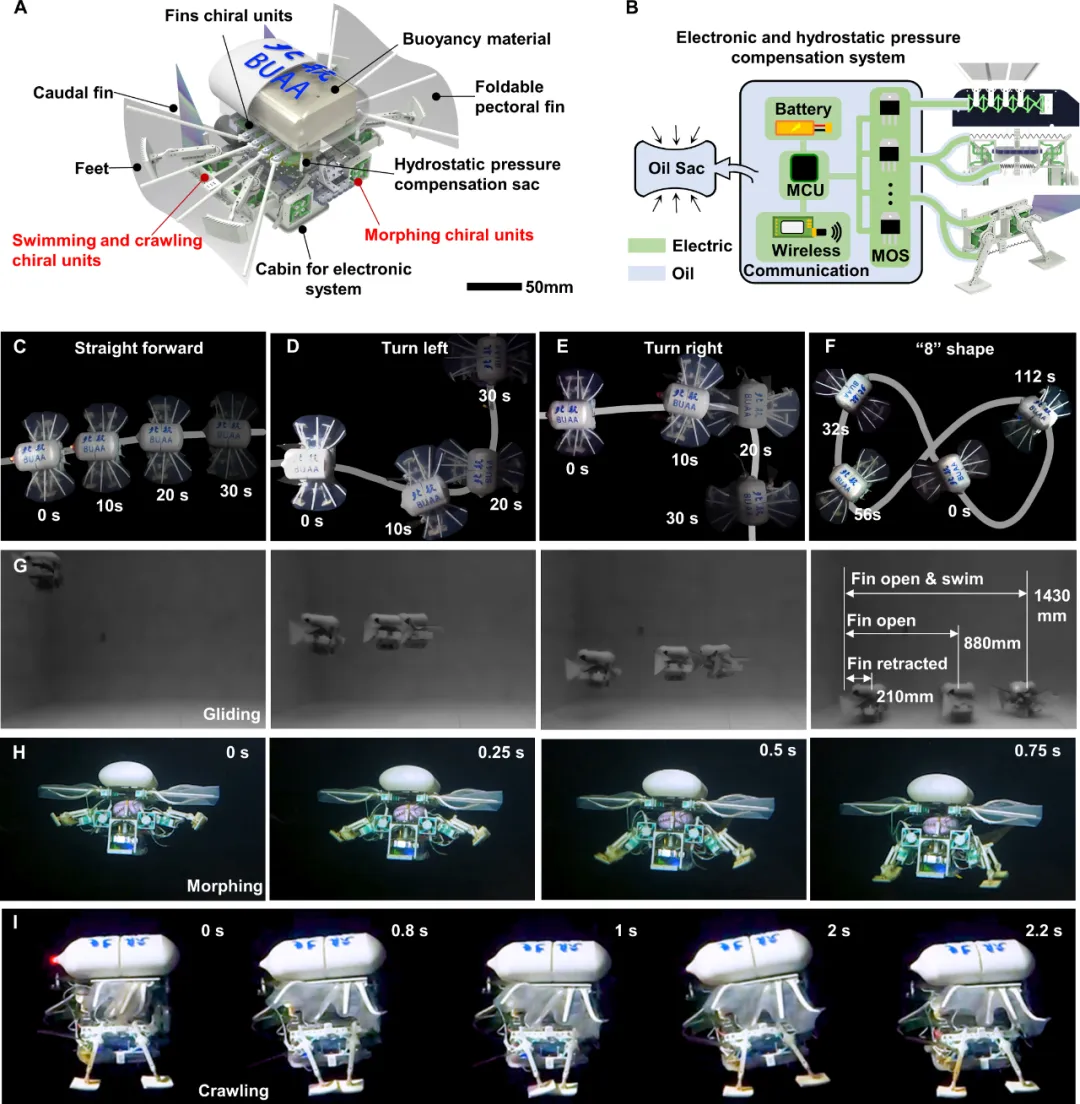 The robot’s multimodal motion in the laboratory aquarium under atmospheric conditions
The robot’s multimodal motion in the laboratory aquarium under atmospheric conditions
- Multifunctional Deep-Sea Gripper: Flexible Operation and Sample Collection
Based on the compression-twist effect of chiral metamaterials, the research team developed a 3D-printed soft gripper.This gripper consists of two symmetrical chiral units and a pair of grasping fingers, which can be worn on a rigid gripper through a Z-shaped connector. The compression-twist coupling effect of the chiral unit allows the gripper to exhibit stable performance during grasping and forms a long stable region after grasping, effectively protecting the object being grasped.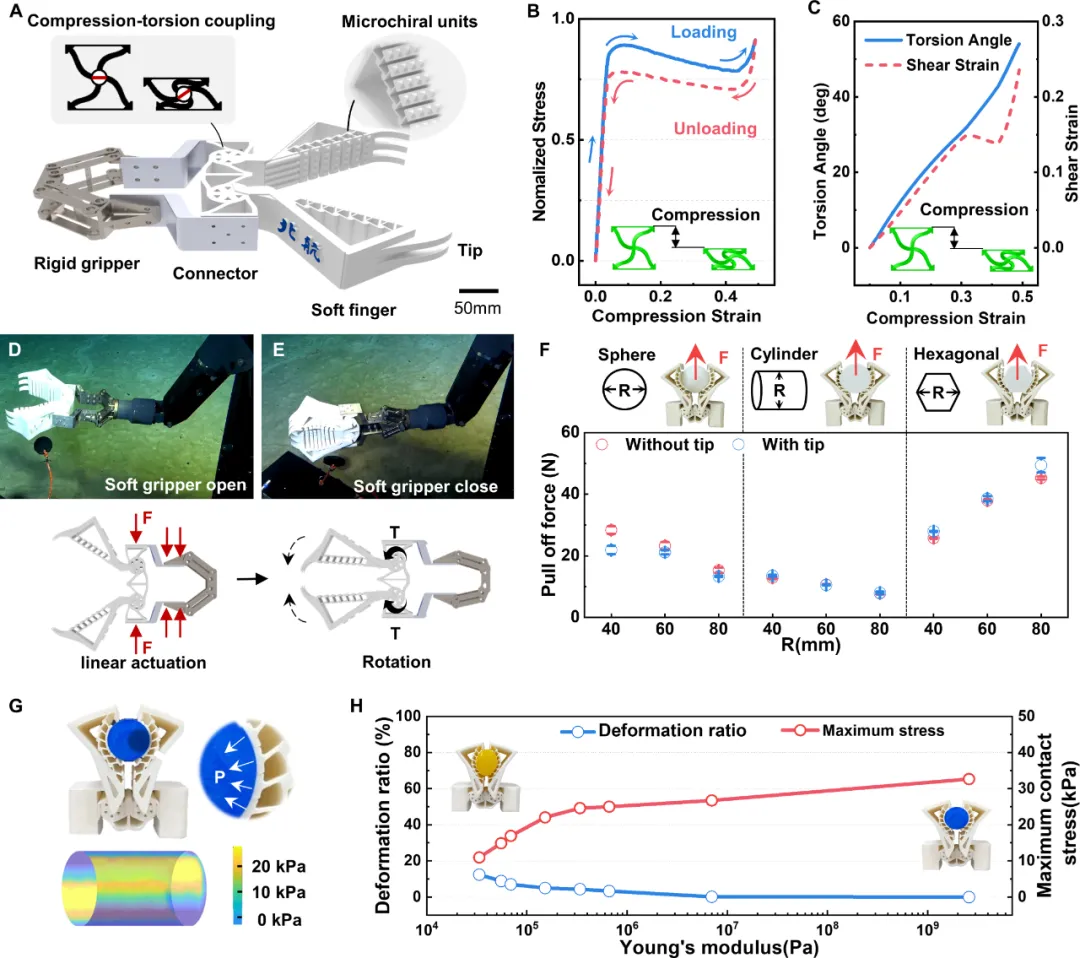 Deep-sea soft gripper for fine operationsTo verify the gripper’s grasping ability, the team conducted pull-off force tests on various shapes and sizes of objects.The results showed that the gripper’s maximum tangential gripping force for spherical objects was 28.3 N, for cylindrical objects was 12.8 N, and for hexagonal objects was 51.8 N. Additionally, the gripper was also deployed on the “Striver” manned submersible for practical application testing, successfully completing tasks such as collecting biological samples of starfish, sea urchins, and sea cucumbers, switching containers, and relocating landers at a depth of 3469 meters.Comprehensive Performance Evaluation, Testing the Robot’s Extreme AdaptabilityTo comprehensively evaluate the performance of the miniature deep-sea robot, the research team conducted multiple tests in both laboratory and deep-sea environments. These tests not only validated the robot’s motion capabilities in different environments but also demonstrated its stability and adaptability under extreme conditions.
Deep-sea soft gripper for fine operationsTo verify the gripper’s grasping ability, the team conducted pull-off force tests on various shapes and sizes of objects.The results showed that the gripper’s maximum tangential gripping force for spherical objects was 28.3 N, for cylindrical objects was 12.8 N, and for hexagonal objects was 51.8 N. Additionally, the gripper was also deployed on the “Striver” manned submersible for practical application testing, successfully completing tasks such as collecting biological samples of starfish, sea urchins, and sea cucumbers, switching containers, and relocating landers at a depth of 3469 meters.Comprehensive Performance Evaluation, Testing the Robot’s Extreme AdaptabilityTo comprehensively evaluate the performance of the miniature deep-sea robot, the research team conducted multiple tests in both laboratory and deep-sea environments. These tests not only validated the robot’s motion capabilities in different environments but also demonstrated its stability and adaptability under extreme conditions.
- Laboratory Performance Testing
In a laboratory environment, the research team conducted detailed tests on the robot in a 1.0m × 4.0m × 8.0m aquarium. A camera was installed above the aquarium to record the robot’s motion trajectory.In swimming mode, the shape memory alloy (SMA) spring actuates the chiral unit, allowing the robot to switch between two stable states, generating paddling motion in the tail fin to propel the robot forward. The test results showed that the robot could achieve a maximum swimming speed of 60.8 mm/s. By controlling the metamaterial actuation modules on both sides of the robot, the research team also successfully achieved directional control and complex motion trajectory generation. Multimodal motion of the robot in the laboratory aquariumIn gliding tests, the expanded pectoral fins allowed the robot to glide a considerable distance in the water. When the pectoral fins were retracted, the robot glided 210 mm; when the pectoral fins were extended and the tail fin was not driven, the gliding distance increased to 880 mm; and when the pectoral fins were extended and the tail fin was driven, the gliding distance further increased to 1430 mm. These results indicate that the foldable pectoral fins significantly enhance the robot’s gliding ability, saving energy and improving the accuracy of landing positions.In state-switching tests, the robot switched from swimming mode to crawling mode within 0.75 seconds after landing, primarily relying on the SMA springs to adjust the chiral unit at the front. In crawling mode, the robot uses the actuators from swimming to flap its anisotropic feet, generating forward frictional force synchronized with the tail fin’s paddling motion. Tests showed that the robot could achieve a maximum crawling speed of 31 mm/s, and by increasing the driving frequency and foot size, the speed could be further enhanced.The robot swimming, crawling, morphing, and gliding in the laboratory aquariumIn propulsion tests, the research team measured the thrust generated by the fins and legs during swimming and crawling. Under the same driving parameters, the thrust generated by the chiral unit (0.370±0.01 N) was 208% higher than that of traditional bearing pin mechanisms (0.120±0.01 N). Additionally, as the modulus of the soft material increased with depth, the thrust also correspondingly increased. The research team also measured the crawling force on smooth (acrylic board) and rough (100-grit sandpaper) surfaces. The results showed that the forward frictional force of the legs on rough surfaces was 1.06±0.02 N, and the force under the combined action of legs and fins was 1.38±0.25 N. The flapping fins enhanced the crawling thrust on rough surfaces by 30.1%.
Multimodal motion of the robot in the laboratory aquariumIn gliding tests, the expanded pectoral fins allowed the robot to glide a considerable distance in the water. When the pectoral fins were retracted, the robot glided 210 mm; when the pectoral fins were extended and the tail fin was not driven, the gliding distance increased to 880 mm; and when the pectoral fins were extended and the tail fin was driven, the gliding distance further increased to 1430 mm. These results indicate that the foldable pectoral fins significantly enhance the robot’s gliding ability, saving energy and improving the accuracy of landing positions.In state-switching tests, the robot switched from swimming mode to crawling mode within 0.75 seconds after landing, primarily relying on the SMA springs to adjust the chiral unit at the front. In crawling mode, the robot uses the actuators from swimming to flap its anisotropic feet, generating forward frictional force synchronized with the tail fin’s paddling motion. Tests showed that the robot could achieve a maximum crawling speed of 31 mm/s, and by increasing the driving frequency and foot size, the speed could be further enhanced.The robot swimming, crawling, morphing, and gliding in the laboratory aquariumIn propulsion tests, the research team measured the thrust generated by the fins and legs during swimming and crawling. Under the same driving parameters, the thrust generated by the chiral unit (0.370±0.01 N) was 208% higher than that of traditional bearing pin mechanisms (0.120±0.01 N). Additionally, as the modulus of the soft material increased with depth, the thrust also correspondingly increased. The research team also measured the crawling force on smooth (acrylic board) and rough (100-grit sandpaper) surfaces. The results showed that the forward frictional force of the legs on rough surfaces was 1.06±0.02 N, and the force under the combined action of legs and fins was 1.38±0.25 N. The flapping fins enhanced the crawling thrust on rough surfaces by 30.1%.
- Deep-Sea Practical Application Testing
To comprehensively validate the performance of the miniature deep-sea robot in real deep-sea environments, the research team also deployed the robot through manned submersibles to test at three different depths: the seahorse cold spring (1384 meters), Longxi Seamount (3756 meters), and the Mariana Trench (10,666 meters).In the seahorse cold spring test, the research team validated the robot’s multimodal motion capabilities by deploying it to a depth of 1384 meters using the “Deep Sea Warrior” manned submersible.Before the test, the team precisely adjusted the robot’s weight on the mother ship to ensure its density was slightly greater than that of the seawater at the intended diving depth, allowing the robot to slowly sink and crawl along the seabed in the deep-sea environment.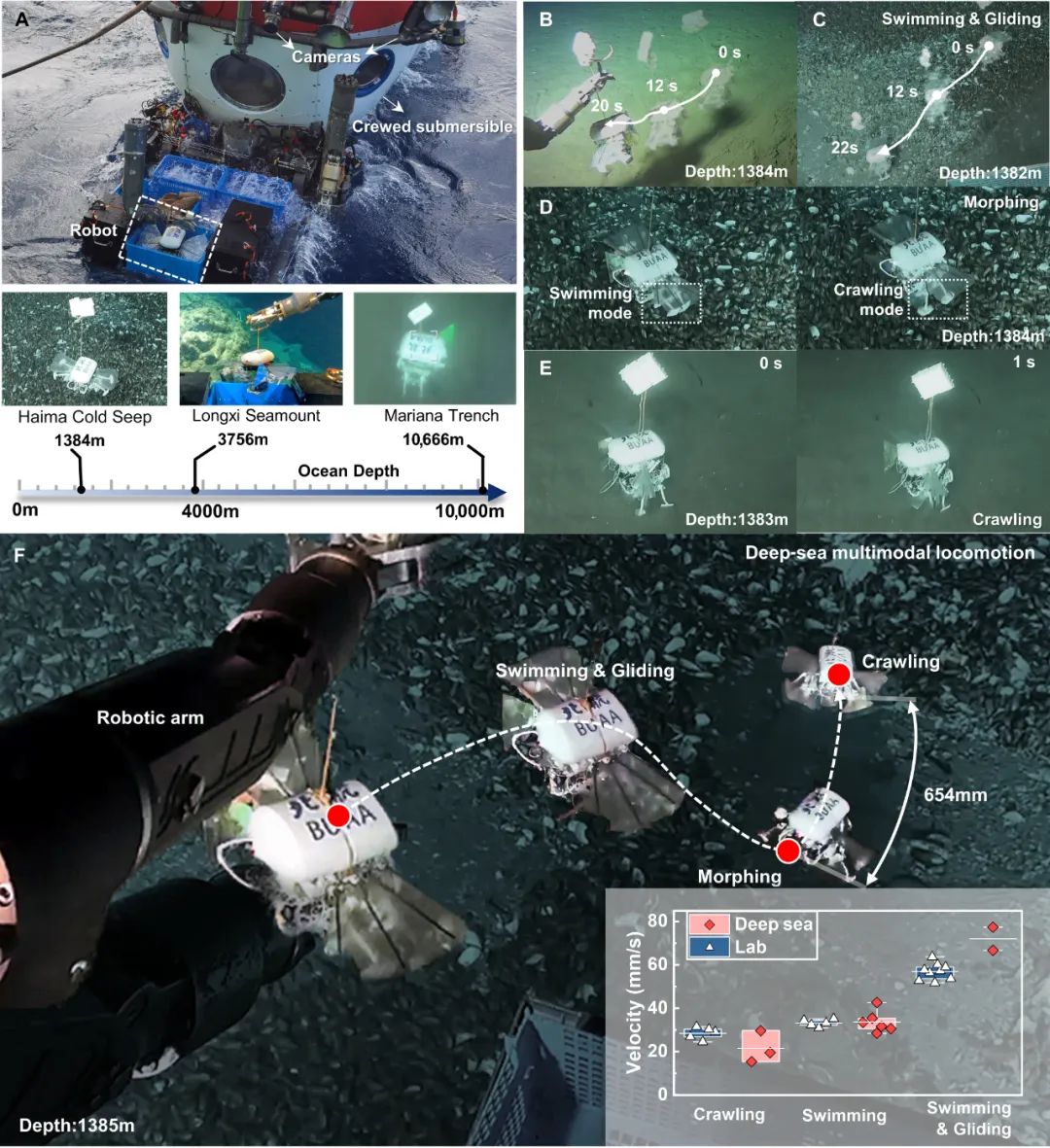 Multimodal motion of the deep-sea robotThe test results showed that the robot swam 671 mm in 20 seconds, with an average speed of 33.7 mm/s, which is consistent with its performance in the laboratory environment (33.1 mm/s).Additionally, the robot demonstrated gliding capabilities, gliding a considerable distance under the lift of the expanded pectoral fins. In crawling tests, the robot crawled 654 mm in 25 seconds, with an average speed of 21.5 mm/s, further validating its stability in deep-sea environments.In the Longxi Seamount test, the research team primarily validated the robot’s adaptability in complex seabed terrains.During the test at a depth of 3756 meters, the robot showcased its agile movement capabilities in rugged seabed terrains. By adjusting the movement patterns of the pectoral and tail fins, the robot could smoothly switch between swimming, gliding, and crawling modes in complex terrains. Furthermore, the robot performed simple task operations such as seabed sample collection and environmental monitoring, further validating its multifunctionality and practicality in deep-sea environments.In the Mariana Trench test, the research team conducted a comprehensive examination of the robot’s extreme performance.In the extreme high-pressure environment at a depth of 10,666 meters, the robot demonstrated its robust motion capabilities. In 12 seconds, the robot swam and glided 400 mm; although the swimming speed slightly decreased at this depth, the robot was still able to complete the intended motion tasks. In crawling tests, the robot crawled 32 mm in 6 seconds at a driving frequency of 0.45 Hz, showcasing its stable performance in extreme high-pressure environments. After the tests, the robot was successfully recovered by the mechanical arm of the “Striver” submersible, and the recovered robot was intact.Through practical application tests in the seahorse cold spring, Longxi Seamount, and the Mariana Trench, the research team comprehensively validated the motion capabilities and task execution abilities of the miniature deep-sea robot in extreme environments. These tests not only demonstrated the robot’s stable performance in high-pressure and low-temperature environments but also validated its adaptability and multifunctionality in complex seabed terrains.Currently, the team is working towards the research direction of “deep-sea flexible robots + AI” and is committed to focusing on enhancing the endurance and motion efficiency of miniature deep-sea robots, achieving broader deep-sea exploration and monitoring, and providing solutions for marine resource development, archaeological excavation, and environmental monitoring. As team member and PhD student at Beihang University, Zuo Zonghao, stated: “The charm of deep-sea research lies in the challenges brought by the unknown; every opportunity to dive is precious, but I always believe that as long as we dare to take a step, there will be light at the bottom of the sea.”
Multimodal motion of the deep-sea robotThe test results showed that the robot swam 671 mm in 20 seconds, with an average speed of 33.7 mm/s, which is consistent with its performance in the laboratory environment (33.1 mm/s).Additionally, the robot demonstrated gliding capabilities, gliding a considerable distance under the lift of the expanded pectoral fins. In crawling tests, the robot crawled 654 mm in 25 seconds, with an average speed of 21.5 mm/s, further validating its stability in deep-sea environments.In the Longxi Seamount test, the research team primarily validated the robot’s adaptability in complex seabed terrains.During the test at a depth of 3756 meters, the robot showcased its agile movement capabilities in rugged seabed terrains. By adjusting the movement patterns of the pectoral and tail fins, the robot could smoothly switch between swimming, gliding, and crawling modes in complex terrains. Furthermore, the robot performed simple task operations such as seabed sample collection and environmental monitoring, further validating its multifunctionality and practicality in deep-sea environments.In the Mariana Trench test, the research team conducted a comprehensive examination of the robot’s extreme performance.In the extreme high-pressure environment at a depth of 10,666 meters, the robot demonstrated its robust motion capabilities. In 12 seconds, the robot swam and glided 400 mm; although the swimming speed slightly decreased at this depth, the robot was still able to complete the intended motion tasks. In crawling tests, the robot crawled 32 mm in 6 seconds at a driving frequency of 0.45 Hz, showcasing its stable performance in extreme high-pressure environments. After the tests, the robot was successfully recovered by the mechanical arm of the “Striver” submersible, and the recovered robot was intact.Through practical application tests in the seahorse cold spring, Longxi Seamount, and the Mariana Trench, the research team comprehensively validated the motion capabilities and task execution abilities of the miniature deep-sea robot in extreme environments. These tests not only demonstrated the robot’s stable performance in high-pressure and low-temperature environments but also validated its adaptability and multifunctionality in complex seabed terrains.Currently, the team is working towards the research direction of “deep-sea flexible robots + AI” and is committed to focusing on enhancing the endurance and motion efficiency of miniature deep-sea robots, achieving broader deep-sea exploration and monitoring, and providing solutions for marine resource development, archaeological excavation, and environmental monitoring. As team member and PhD student at Beihang University, Zuo Zonghao, stated: “The charm of deep-sea research lies in the challenges brought by the unknown; every opportunity to dive is precious, but I always believe that as long as we dare to take a step, there will be light at the bottom of the sea.” Beihang University participating student Zuo Zonghao diving test with the “Deep Sea Warrior” manned submersibleIn the future, the research team will focus on enhancing the endurance and motion efficiency of miniature deep-sea robots, achieving broader deep-sea exploration and monitoring, and providing more solutions for marine resource development, archaeological excavation, and environmental monitoring.
Beihang University participating student Zuo Zonghao diving test with the “Deep Sea Warrior” manned submersibleIn the future, the research team will focus on enhancing the endurance and motion efficiency of miniature deep-sea robots, achieving broader deep-sea exploration and monitoring, and providing more solutions for marine resource development, archaeological excavation, and environmental monitoring.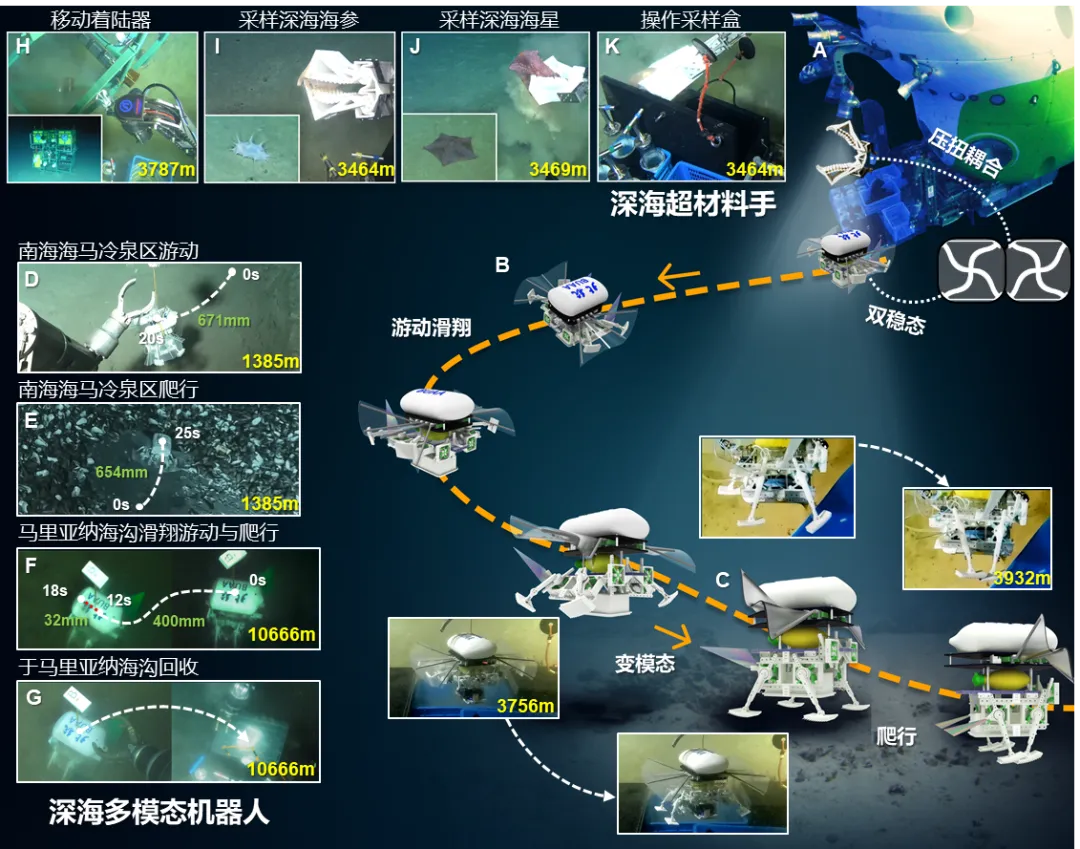 Concept imagePan Fei, Liu Jiaqi, Zuo Zonghao, and He Xia are co-first authors of this paper, with Professor Wen Li and Professor Ding Xilun from the School of Mechanical Engineering and Automation as corresponding authors. Beihang University is the first and corresponding unit of this paper. This research was funded by the Youth Science Fund Project (Class A) and other projects.Recently, Professor Wen Li was elected as a member of the new Editorial and Advisory Boards of the journal Science Robotics for his academic contributions in the fields of bionic robots, soft robots, and marine robots (25 scientists worldwide were selected).
Concept imagePan Fei, Liu Jiaqi, Zuo Zonghao, and He Xia are co-first authors of this paper, with Professor Wen Li and Professor Ding Xilun from the School of Mechanical Engineering and Automation as corresponding authors. Beihang University is the first and corresponding unit of this paper. This research was funded by the Youth Science Fund Project (Class A) and other projects.Recently, Professor Wen Li was elected as a member of the new Editorial and Advisory Boards of the journal Science Robotics for his academic contributions in the fields of bionic robots, soft robots, and marine robots (25 scientists worldwide were selected). Link to the paper publication:
Link to the paper publication:
https://www.science.org/doi/10.1126/scirobotics.adp7821
Source: Beihang University, Robotics Lecture Hall
If you need to consult for business cooperation, promotion, reprinting, etc., please contact: 18355423366 (WeChat same number) for coordination.
END
 ●Academician Sun Lining: Micro-nano perception empowers the innovative development of embodied intelligent robots●Robot Technology and Applications, 2025, Issue 1 (Total Issue 223)●From “breaking the rules to go public” to a threefold increase in market value, Yujian Technology leads the Hong Kong stock robot track●Humanoid robots enter mass production: price wars erupt, industrial restructuring and social imagination under technological revolution●Highlights: Robot concept listed companies face pressure in the first half of 2024, opportunities arise as robots and AI converge●Highlights from the 2023 annual reports of 55 listed robot companies: mixed results, intensified reshuffling●A comprehensive overview of China’s humanoid robot R&D teams●Amidst the heat of humanoid robots, the struggle between advancement and resistance●Who is the most eye-catching? Highlights from the mid-2023 reports of 53 listed robot companies●Download the semi-annual reports of 53 listed robot companies (with PDF)●Interview with Tsinghua University’s Zhao Mingguo: Accelerating evolution to replicate Boston Dynamics’ movements, what we need is confidence and innovation!●Results of the preliminary evaluation of the 2023 National Science and Technology Awards announced! Nine 985 universities on the list! XJTU and Huazhong University of Science and Technology in the top three! (with full list)●Unprecedented! American engineers collaborate with ChatGPT4 to design artificial intelligence chips●Russian President Putin approves the new version of the “2030 National Strategy for AI Development”●With a population of less than 200,000! How the Danish town of Odense became a global robot center?●“Commercialization Year” begins, new players in humanoid robots emerge●Swiss researchers develop a new type of artificial muscle, lighter, safer, and stronger!●The EU terminates Amazon’s acquisition of iRobot, where will the former cleaning robot giant go?●Top ten news in the robot industry in 2023●Muscle tissue-driven bipedal robots emerge, a breakthrough in biohybrid robots!●Professionals discuss the robot-as-a-service model—The future of automation●Academician Report|Pan Yunhe: Behavioral intelligence and product intelligence of artificial intelligence●Academician discusses new driving forces for promoting collaborative intelligent manufacturing with robots●Academician discusses six key technologies for innovative robot design●Ximu Technology broadens new angles in humanoid robot research●Academician discusses the dual driving model for future AI development●Academician discusses how institutional intelligence brings “Transformers” from the screen to reality
●Academician Sun Lining: Micro-nano perception empowers the innovative development of embodied intelligent robots●Robot Technology and Applications, 2025, Issue 1 (Total Issue 223)●From “breaking the rules to go public” to a threefold increase in market value, Yujian Technology leads the Hong Kong stock robot track●Humanoid robots enter mass production: price wars erupt, industrial restructuring and social imagination under technological revolution●Highlights: Robot concept listed companies face pressure in the first half of 2024, opportunities arise as robots and AI converge●Highlights from the 2023 annual reports of 55 listed robot companies: mixed results, intensified reshuffling●A comprehensive overview of China’s humanoid robot R&D teams●Amidst the heat of humanoid robots, the struggle between advancement and resistance●Who is the most eye-catching? Highlights from the mid-2023 reports of 53 listed robot companies●Download the semi-annual reports of 53 listed robot companies (with PDF)●Interview with Tsinghua University’s Zhao Mingguo: Accelerating evolution to replicate Boston Dynamics’ movements, what we need is confidence and innovation!●Results of the preliminary evaluation of the 2023 National Science and Technology Awards announced! Nine 985 universities on the list! XJTU and Huazhong University of Science and Technology in the top three! (with full list)●Unprecedented! American engineers collaborate with ChatGPT4 to design artificial intelligence chips●Russian President Putin approves the new version of the “2030 National Strategy for AI Development”●With a population of less than 200,000! How the Danish town of Odense became a global robot center?●“Commercialization Year” begins, new players in humanoid robots emerge●Swiss researchers develop a new type of artificial muscle, lighter, safer, and stronger!●The EU terminates Amazon’s acquisition of iRobot, where will the former cleaning robot giant go?●Top ten news in the robot industry in 2023●Muscle tissue-driven bipedal robots emerge, a breakthrough in biohybrid robots!●Professionals discuss the robot-as-a-service model—The future of automation●Academician Report|Pan Yunhe: Behavioral intelligence and product intelligence of artificial intelligence●Academician discusses new driving forces for promoting collaborative intelligent manufacturing with robots●Academician discusses six key technologies for innovative robot design●Ximu Technology broadens new angles in humanoid robot research●Academician discusses the dual driving model for future AI development●Academician discusses how institutional intelligence brings “Transformers” from the screen to reality Contact Us· WeChat: hszht2025· Contact Number: 18100123515
Contact Us· WeChat: hszht2025· Contact Number: 18100123515