*Original Author: hyc66, this article is part of the Freebuf original reward program, unauthorized reproduction is prohibited.
A robot that needs power to sustain life is not called a robot; it should be called a machine. After six months, the author, known as Polar Bear, began to delve into the field of robotics, aiming to change the world through artificial intelligence.
A brief self-introduction:I have been a top customer service representative selling diapers, a sidekick for handbag sales, a furniture assembler and mover, and have worked in various jobs. Finally, borrowing a line from “Infernal Affairs”: I had no choice before, but now I want to be a good person. I transformed into an information security professional… I am 25 years old this year, a vocational school graduate, and still studying. After reading this article, there should be no reason for you not to work hard, right?
Introduction
The determination to build a robot came in July 2016 when I saw the “robots” on the market, which were vastly different from the robots in my mind. The robots I envisioned were only seen in movies (recommended films: Pacific Rim, Chappie, Hardcore Henry, Ex Machina, etc.). A robot should be a “hero” that makes people scream when they see it! Not just something that rolls around saying welcome and delivering groceries. This is not a robot; it is merely a mechanical device! The robot I want is immortal, possesses human intelligence, and can surpass humans. It should have a Skynet system, but: the Skynet system is just a standard configuration. Now, let me introduce my journey in robot development!
First Generation of the Bohr Robot


Second Generation
Development Journey in July 2016 (PS: Looking back at the first generation robot now, it really looks outdated!):
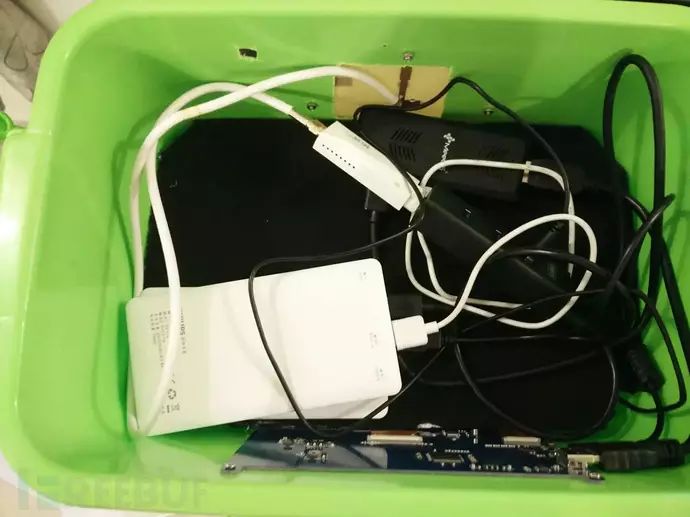
I bought a plastic box on Taobao, a touch screen, a microphone, and a small speaker. All the components were piled together, powered by a power bank, and I wrote the control program myself using a small WIN10 operating system. First, I tried using the microphone to call “Baidu Voice” for recognition (PS: although the recognition rate was not great, at least it was free), then I used “Turing Semantic Recognition” for dialogue, and generated custom voice using “iFlytek”. A very basic small robot was developed, capable of basic remote control via WIFI and 4G. Later, I thought, why does it look so ugly? This little thing seems to have no meaning! Let’s continue to upgrade and modify it!

In August 2016, two months later, I bought a “WALL-E” model toy online and disassembled it. After all, people still care about appearances…
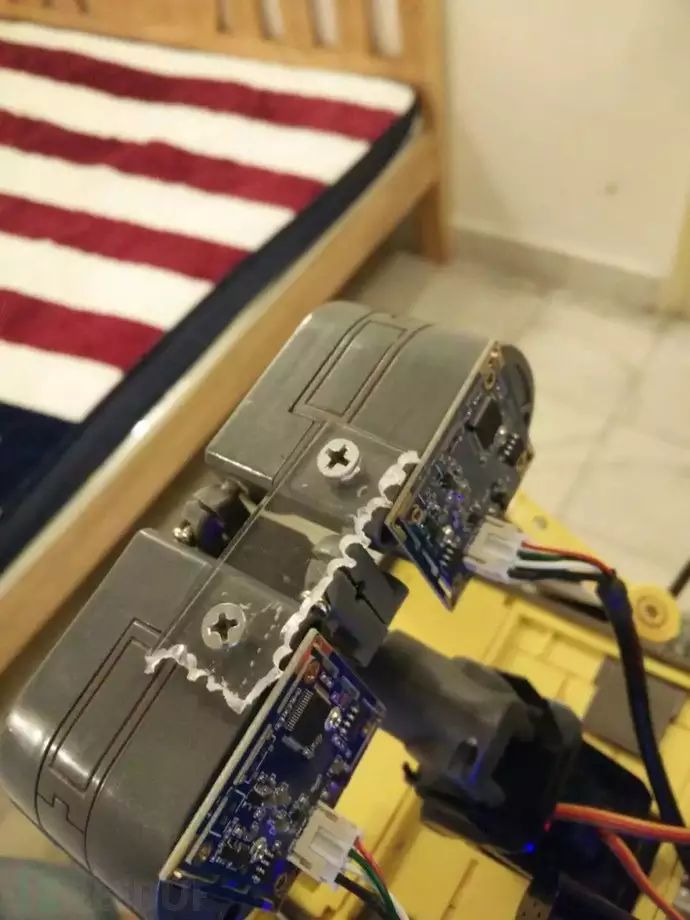

I removed the eyes and installed two cameras for facial recognition, currently using 【Eyekey】 to obtain basic facial data: age, gender, whether the eyes are open, whether the mouth is open, etc…

Second generation video demonstration link: http://www.tudou.com/programs/view/6io89hYzlKQ/
Third Generation
It looks better, is more fun, and can converse autonomously, but it still serves no real purpose! The robot I want should be able to fight, just like in the movies; it must be a hero, it should be like this!
How can it still be just a toy after all this effort??
 [Robot from the movie Pacific Rim]
[Robot from the movie Pacific Rim]
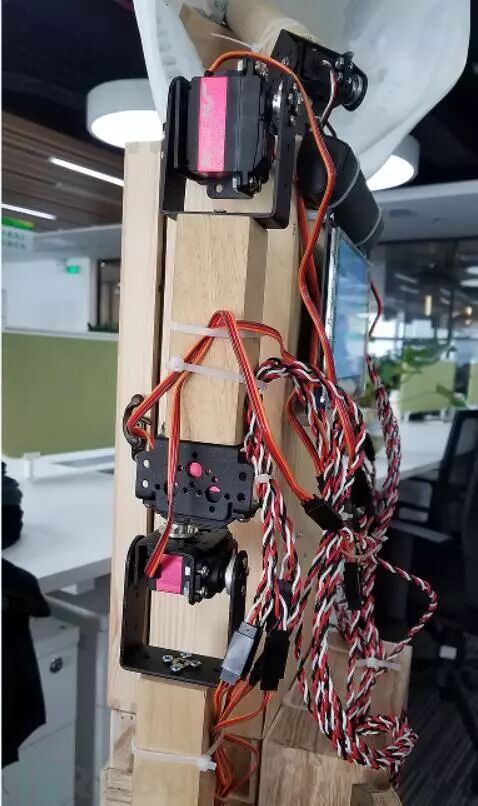
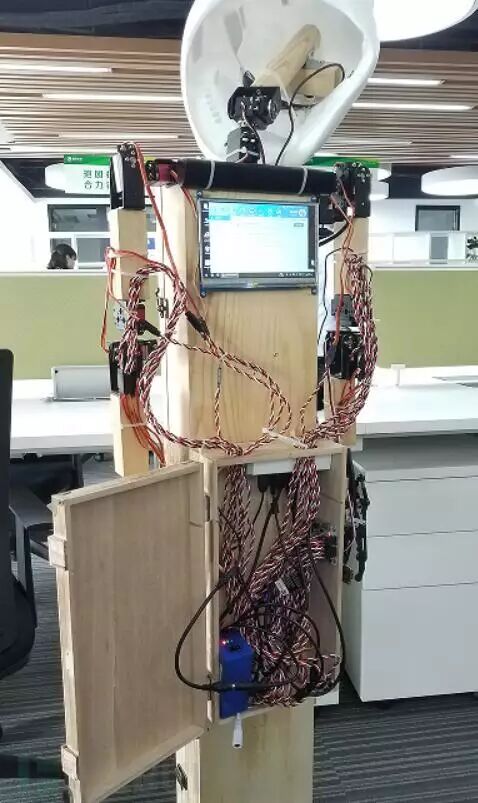
Alright, let’s continue to modify it. Due to limited funds (everything is self-funded, and when I run out of money, I swipe my credit card to buy materials), I disassembled all the original components and started the bionic design of the robot. I bought a wine box to make the body, and a children’s toy helmet to make the robot’s head. As for the laser sword, yes, it’s also a toy. I had to use relatively inexpensive materials to develop the third generation robot.





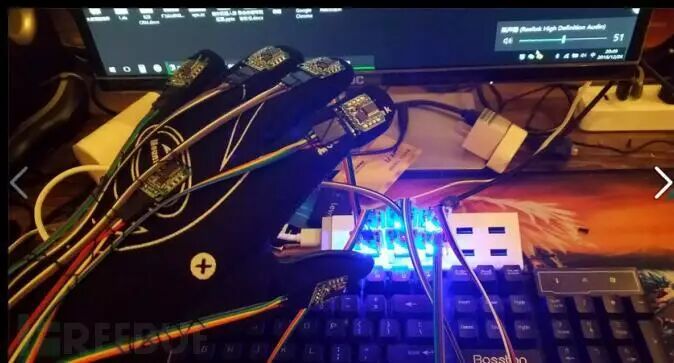
[Self-sewn gloves used for capturing motion gestures with a gyroscope; I do not plan to use gyroscopes in the next generation as the wiring is too complex. I plan to write camera algorithms for synchronized control.]
Video Demonstration:
1. Arm synchronization video:http://www.tudou.com/programs/view/B31t0S9_Nqc/
2. Finger synchronization video:http://www.tudou.com/programs/view/biWki3bdSVQ/
3. Robot movement video:http://www.tudou.com/programs/view/ZJm2bNjOyaY/
By March 2017, the third generation robot was basically completed. Is everyone interested in the parameters?

[The above image shows the robot’s operating system]
Functional Parameters:
1. Supports voice recognition, voice dialogue, and facial recognition; customizable language types are basic functions.
2. Supports remote control without distance limitations, with millisecond response rates.
3. Supports remote human motion synchronization, allowing the robot to mimic your movements.
4. Currently, it can only walk using tracks; due to insufficient funds, bipedal development will be delayed.
5. Supports cloud upgrades; when powered on, it automatically retrieves the robot’s parameter information from the server for modifications.
6. Native support for over ten million software installations and operations on the Windows platform.
7. USB-TTL communication method makes robot body control highly intelligent.
8. All components can be purchased online at low costs.
9. I tend to focus on software, as software will continue to improve and become more powerful, while hardware will age over time.
Below are screenshots of the system:

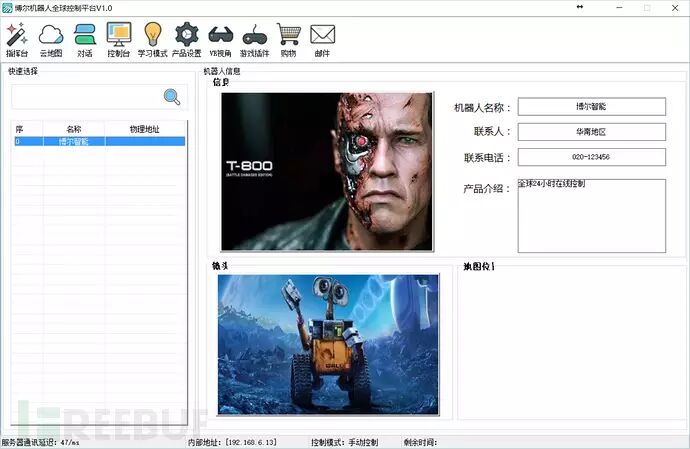
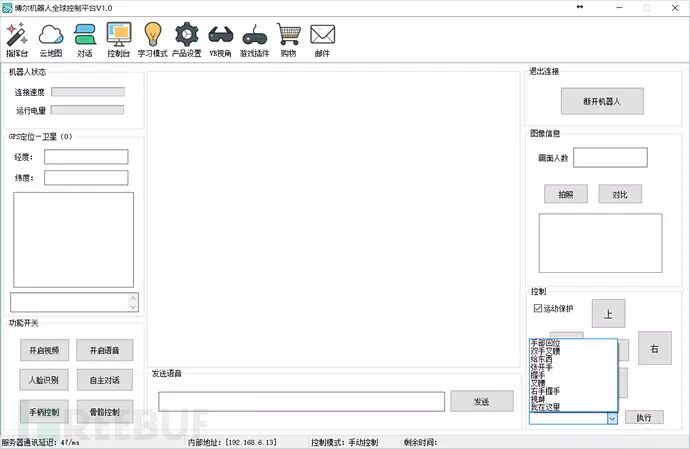
As an ordinary customer, after running the software, you can directly see the robots online across the country. Double-clicking can view specific information, and users can input the remote link password to achieve remote control of the robot.
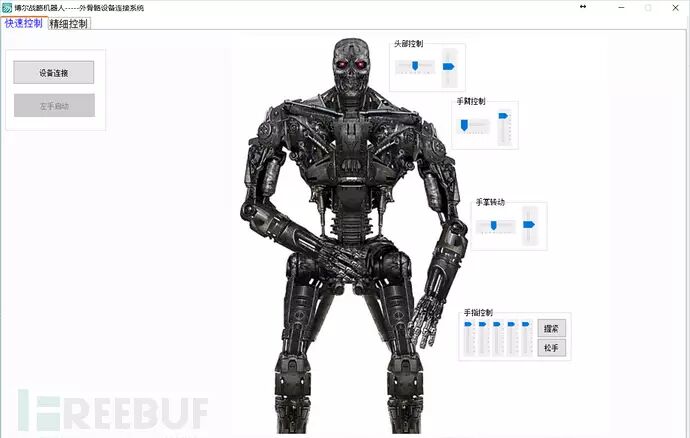
The above image shows the robot’s skeletal control system.
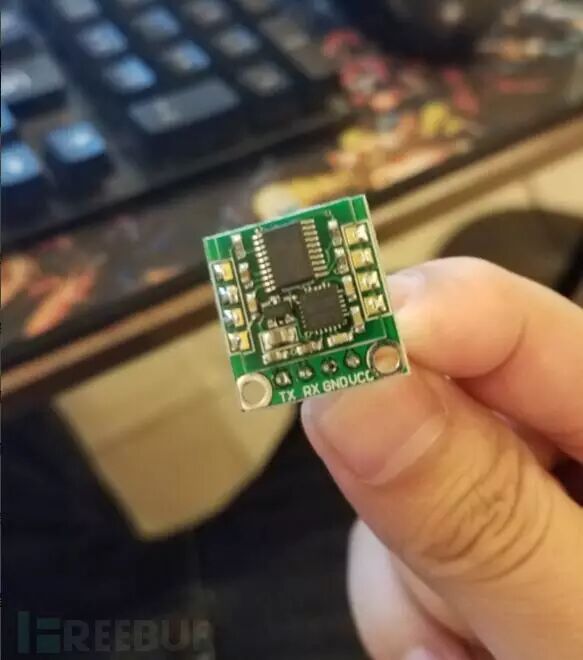
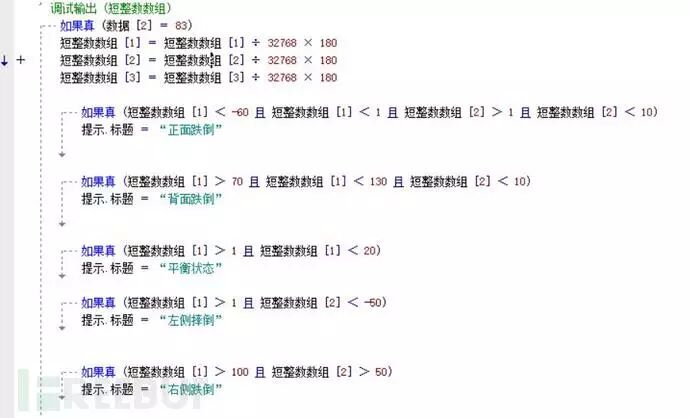
Writing a self-protection system is also simple. By obtaining the angle of the gyroscope, we can determine whether the robot is in a balanced state. Here we can program actions to be taken when a fall is detected, such as: the robot implementing self-correction and changing its movement angle to avoid falling.

After using Baidu voice recognition, the recognized content is sent to the “Turing Semantic System” to obtain the robot’s “response”. Then, we just need to use iFlytek for text-to-speech operations.
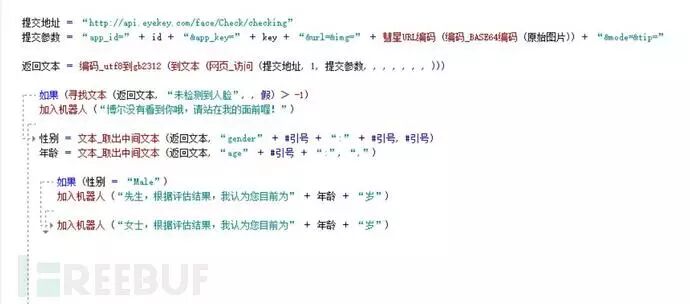
About the Facial Recognition System:Just ask the robot: How old am I? The robot will automatically take your photo, use the API interface to recognize your face, and answer your question.
At this point, you should quickly realize that I am not creating anything; rather, I am utilizing existing technological products to create a comprehensive assembly. Whatever is good from others, I will use, to assemble a complete robot. The platform is used to provide remote invocation, system upgrades, and other services.
Since the product has been discussed, let me talk about what I want to do. Currently, the three systems 【robot end, client end, server end】 are all written by me. The robot you see in the entire product is merely a robot body; the true soul lies in the “central control system”. It allows users to set the robot’s gender, personality, and knowledge system adjustments. When the 【robot body】 is powered on, it will download updated data from the cloud, giving the robot corresponding capabilities. Therefore, the robot can achieve self-learning without being powered on, and customers can browse the robot’s visual and auditory data on the Skynet platform.
I want the live broadcast system:to not just show handsome guys and beautiful girls singing and being cute, but to watch others control robots in countries like Iraq to eliminate terrorists, using various weapons, harvesting, just as simple as playing a game.
I want to build a robot empire:to have such substitute robots cover the world, available for rent and control for just a few hundred yuan, achieving a goal that is within reach.
I want to loudly tell you:such robots do not need to cost millions, nor take 20 years; they can be realized for the price of an iPhone 7. My strength alone is too weak; I hope to find like-minded friends to develop together and make the world safer.
I did a project roadshow at the company, but it failed because I did not know where the product’s value point was, meaning I did not know what the developed value was, how to sell it, and what its purpose was. Sigh, I feel exhausted; perhaps my introduction was problematic… Interested parties can also download the PPT I made. http://www.im-fox.com/博尔机器人进阶.pdf
If you have any good suggestions or opinions, feel free to contact me! I hope everyone can support me in the comments; I want to continue developing it, but after repeated setbacks, I feel a bit demotivated…
Next, I plan to transform it into a bipedal robot and want to buy a 3D printer to print the entire robot’s shape… however, my funds have already hit rock bottom…
[email protected] My email, I used to play on Wu Yun, and then I took it over… 2333333
*Original Author: hyc66, this article is part of the Freebuf original reward program, unauthorized reproduction is prohibited.
