
In the wave of embodied intelligence, robots are evolving from “programmed mechanical arms” in laboratories to integrated agents of “perception-decision-execution”. In this process, communication protocols act as the robot’s “nervous system”, determining its action precision, collaboration efficiency, and adaptability to various scenarios. The EtherCAT technology represents a core breakthrough in this evolution. Guoxun Chip Micro has launched synchronous multi-master technology based on its proprietary hard real-time operating system and the NIIC EtherCAT Master 2.0 protocol stack, accelerating the implementation of embodied intelligence.
Why has EtherCAT become a ‘must-have’ for embodied intelligence?
Mainstream communication protocols such as RS-485, CAN bus, and EtherCAT differ in their attributes. A vivid analogy would be that if the RS-485 bus is likened to an old mobile phone sending text messages, its characteristic is slow speed (like sending one text per second), suitable for transmitting simple data like temperature or speed, but it has poor anti-interference capabilities.
On the other hand, the CAN bus resembles an old intercom, commonly used in automotive and industrial control, known for its stability but with fixed channels (for example, each button corresponds to a fixed command), making it suitable for standardized actions.
EtherCAT, however, is like a 5G video call, using dedicated chips to achieve real-time communication + group command transmission. The human blink takes about 100-400 milliseconds, and 1‰ of that is 0.1-0.4 milliseconds (or 100-400 microseconds), while EtherCAT’s actual synchronization precision far exceeds this and is unaffected by the number of nodes.
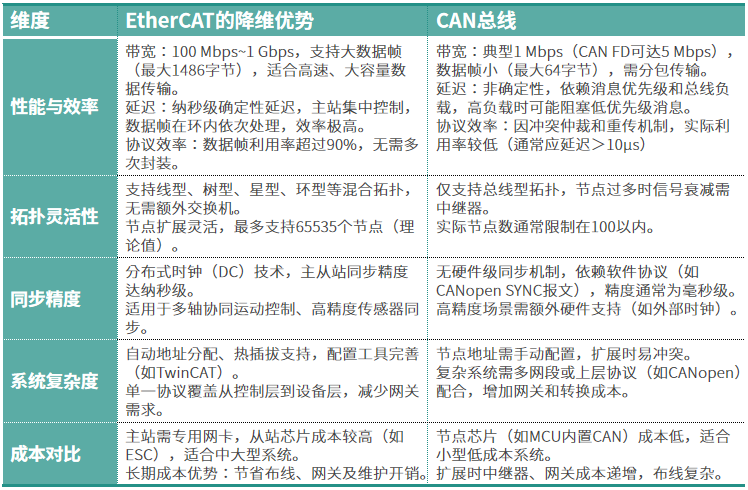
Comparison of EC and CAN dimensions
Some leading manufacturers have completed the protocol switch from CAN to EtherCAT, with emerging fields such as medical robots and humanoid robots adopting EtherCAT as the default standard. However, the humanoid robot controllers used predominantly employ a heterogeneous separation model of large and small brains, and the EtherCAT protocol is implemented using open-source rather than proprietary solutions. Additionally, the communication bottleneck between heterogeneous controllers persists, preventing the realization of end-to-end solutions.
Guoxun Chip Micro has independently developed the EtherCAT protocol stack for many years and is now capable of deploying perception, decision-making, and execution tasks on a single SoC based on its proprietary hard real-time operating system, utilizing the NIIC EtherCAT Master 2.0 commercial synchronous multi-master solution to achieve complete end-to-end functionality.
NIIC Synchronous Multi-Master Technology: Solving the ‘Nervous Coordination’ Challenge of High-Degree-of-Freedom Robots
Under the traditional single-master architecture, high-degree-of-freedom robots face issues such as long control cycles, significant phase deviations among multiple axes, and poor protocol compatibility, leading to action delays and increased energy consumption. Guoxun Chip Micro’s NIIC EtherCAT Master 2.0 significantly outperforms open-source EtherCAT protocol stacks in terms of real-time performance, synchronization precision, multi-master collaboration capabilities, and system integration, with specific advantages as follows:
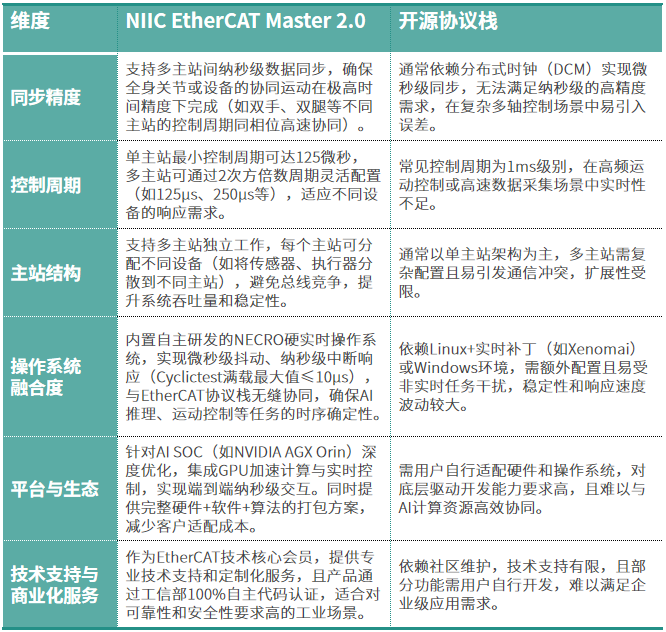
Comparison of NIIC Multi-Master Technology and Open-Source Protocol Stack
Guoxun Chip Micro’s NIIC EtherCAT Master 2.0 achieves industrial-grade top-level performance in synchronization precision, control cycles, multi-master collaboration, and real-time capabilities through an integrated design of “hardware-software-algorithm”, making it especially suitable for humanoid robots and precision manufacturing in highly complex scenarios.
Making the Robot’s ‘Nervous System’ More Autonomous and More Chinese
According to ETG data, the number of EtherCAT nodes reached 77.1 million in 2023, with an annual growth of 30%. As the only domestic company supporting multi-master synchronization, Guoxun Chip Micro is accelerating the process of domestic substitution while providing a foundational solution for ‘nervous coordination’ for high-degree-of-freedom robots through protocol stack innovation, hard real-time system optimization, and ecological integration, promoting the transition of embodied intelligence from the laboratory to practical scenarios.


· Guoxun Chip Micro featured in the “Xinhua Daily”, showcasing the prowess of ‘hard technology’
· The 2025 Tianjin Embodied Intelligence Robot Development Conference sends signals
·StarSpeedNMA MatrixAccelerator:BreakingtheComputingPowerBottleneckofInnovationForce
· NSPIC-R006NP+ Embodied Intelligence Controller aids high-end manufacturing

