The improvement route of autonomous driving technology is a gradual evolution from existing ADAS technology. Below is a brief introduction to the current mainstream advanced driver assistance systems (ADAS) technology and products used in L1 and L2.
To achieve partial autonomous driving functions, vehicles must first be equipped with adaptive cruise control systems, automatic braking systems, cameras and sensors around the vehicle, and lane-keeping systems. Only vehicles equipped with these systems can be considered as having partial autonomous driving capabilities. Such autonomous vehicles can easily set up for a comfortable autonomous driving journey while driving on highways. However, it is important to note that drivers must still remain attentive while operating these vehicles.
Common advanced driver assistance systems in vehicles typically include the following functions:
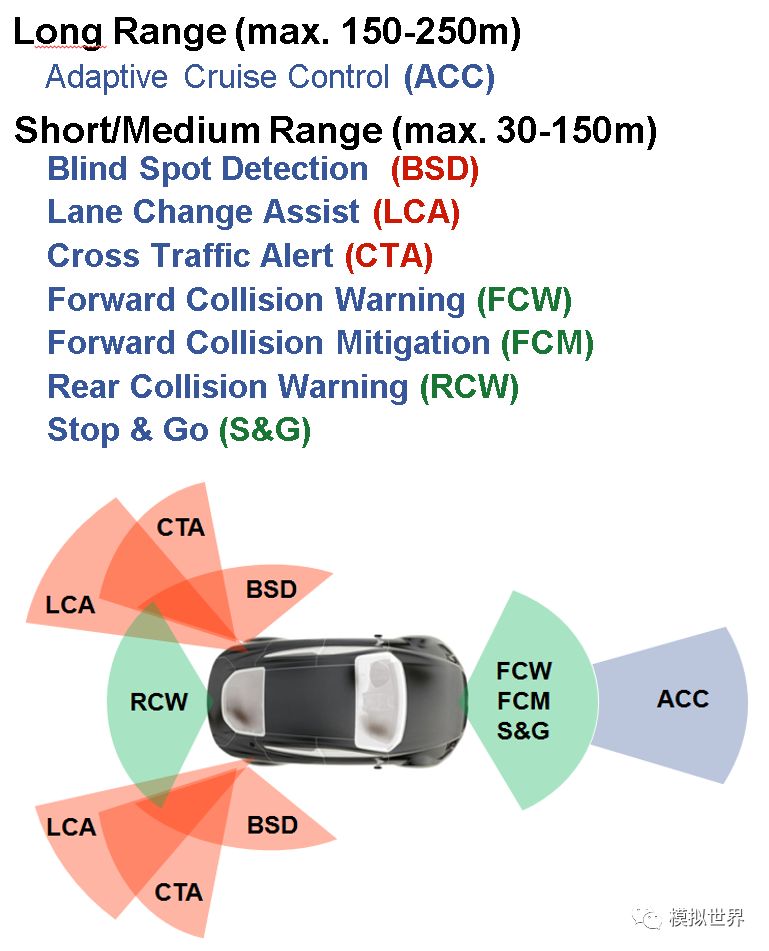
Navigation and real-time traffic systems (TMC), electronic police systems (ISA – Intelligent Speed Adaptation or Intelligent Speed Advice), vehicular communication systems, adaptive cruise control (ACC), lane departure warning systems (LDWS), lane change assistance systems, lane departure warning (LDW), collision avoidance or pre-collision systems, forward collision warning systems (FCWS), rear collision warning (RCW), night vision systems, cross traffic alert (CTA), adaptive light control, pedestrian protection systems, automatic parking systems, traffic sign recognition, blind spot detection (BSD), driver drowsiness detection, hill descent control, and electric vehicle warning sounds systems.
Among these, the currently mainstream applications include ACC, BSD, LCA, CTA, FCW, and RCW.
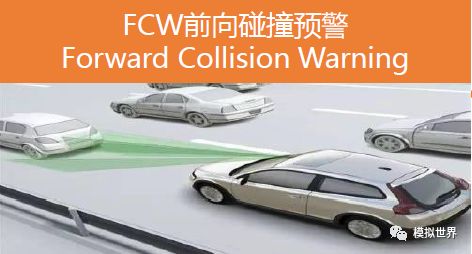
1. Forward Collision Warning System (FCWS)
The core function of the forward collision warning system is to alert the driver of the danger of colliding with a vehicle ahead. Note that this only applies to vehicles directly in front; it does not provide warnings for other three-dimensional obstacles, which is different from reversing radar systems that typically use millimeter-wave radar to detect obstacles within a short range when reversing.
FCWS is specifically for vehicle collision warnings, which depend on the sensors and algorithms used. General cameras cannot obtain depth information, and without special algorithms, they cannot detect typical obstacles. The forward collision warning can detect vehicles because they are similar objects with distinct contour features. The forward collision warning system extracts features specifically related to vehicles. In addition to detection, it must also establish a distance model, and there are many models for determining warnings. The accuracy of the forward collision warning significantly affects the user experience of this ADAS active safety product; if the warning model and vehicle detection are poor, frequent alerts can be a headache and disrupt the driver’s normal driving.
2. Lane Keeping and Lane Departure Warning (LDW) System
The core function of the lane departure warning system is to maintain lane position and avoid crossing lane lines during normal driving. This system automatically adjusts the vehicle’s position by recognizing lane lines. The automotive industry has clear regulations regarding lane departure warnings, including warning levels during the departure process and recognition distances for curved lane lines.
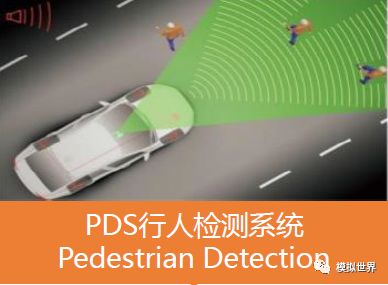
3. Pedestrian Protection (PCW)
The pedestrian collision warning system primarily detects and identifies pedestrians on the road, calculating distances to avoid collisions. Due to the high variability in human activity and the various ways pedestrians participate in road traffic (e.g., riding bicycles, motorcycles, tricycles), along with the diverse characteristics of pedestrians (height, weight, clothing), the accuracy of pedestrian recognition using standard methods is generally low, leading to many false detections and identifications. Traditional detection methods use HOG features combined with SVM, while deep learning methods yield better results.
4. Blind Spot Detection (BSD)
Blind spot detection focuses on detecting vehicles in the areas obscured by the A-pillars on both sides of the vehicle, helping drivers avoid misjudging lane changes due to visual blind spots. BSD assists drivers in better observing the status of vehicles behind and beside them. The method typically used is optical flow.

5. Adaptive Cruise Control (ACC)
Adaptive cruise control is a system that allows the vehicle’s cruise control system to adjust speed according to traffic conditions. Radar mounted on the roof can detect the distance to objects ahead and use a series of algorithms to identify potential threats on the road.

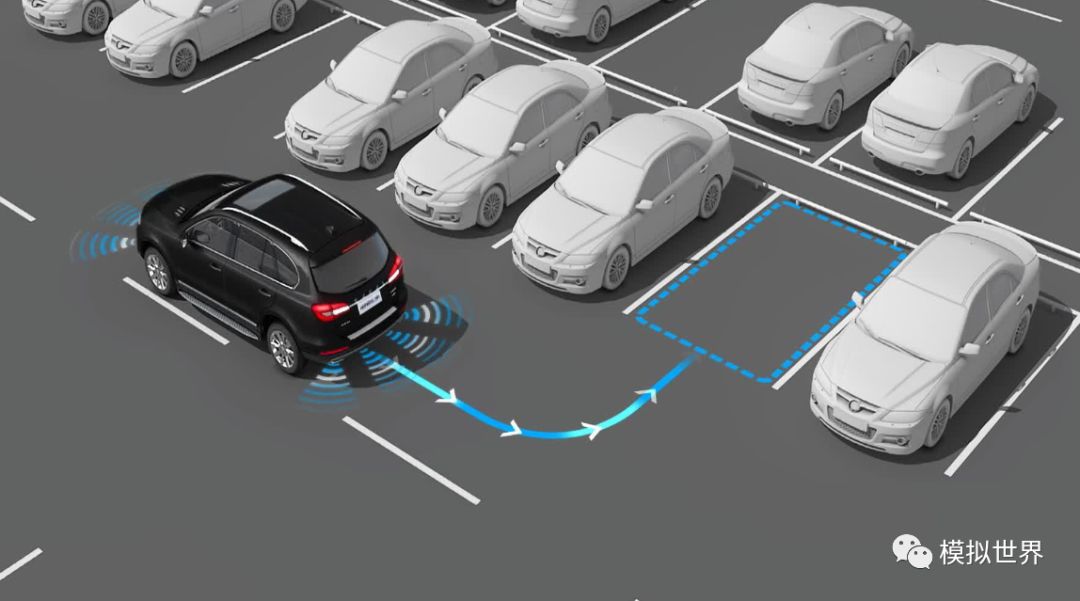
6. Automatic Parking System
As the name suggests, the automatic parking system is a system that allows the vehicle to park itself without human intervention. The automatic parking system enables the vehicle to park correctly in designated spots. This system includes an environmental data collection system, a central processing unit, and a vehicle strategy control system. The environmental data collection system consists of an image acquisition system and an onboard distance detection system.
The principle is as follows: radar sensors surrounding the vehicle measure the distance and angle to surrounding objects, and the onboard computer calculates the operational process while adjusting the steering wheel based on vehicle speed. The driver only needs to control the speed. The system can collect image data and distance data of surrounding objects and transmit this data to the central processor via data lines. The central processor analyzes the collected data to determine the vehicle’s current position, target position, and surrounding environmental parameters, and based on these parameters, it formulates an automatic parking strategy and converts it into electrical signals. The vehicle strategy control system receives the electrical signals and controls the vehicle’s movement in terms of angle, direction, and power assistance based on the instructions.
Detailed Introduction to ACC
ACC stands for “Adaptive Cruise Control”. Let’s start with cruise control, which is generally divided into fixed-speed cruise and adaptive cruise.
Fixed-speed cruise allows the vehicle to cruise at a constant speed without driver operation (accelerating). This function requires a certain speed to activate, typically calibrated to a speed above 50 km/h. Once in cruise mode, there is an initial speed (e.g., 50 km/h), and the speed can be adjusted using buttons (increase, decrease, fast increase, fast decrease). Exiting cruise mode also has a series of conditions, such as pressing the brake pedal.
Adaptive cruise control (AAC) is more intelligent and can engage at lower speeds. It is suitable for both highways and urban conditions, allowing for stop-and-go driving.
The adaptive cruise control system is an intelligent automatic control system developed based on existing cruise control technology. During vehicle operation, the distance sensor (radar) installed at the front of the vehicle continuously scans the road ahead, while the wheel speed sensor collects speed signals. When the distance to the vehicle ahead is too short, the ACC control unit can coordinate with the anti-lock braking system and engine control system to apply appropriate braking and reduce engine output to maintain a safe distance from the vehicle ahead. Additionally, an alarm will sound to alert distracted drivers, effectively preventing rear-end collisions. When controlling vehicle braking, the ACC system typically limits the braking deceleration to a comfortable level. If greater deceleration is needed, the ACC control unit will issue visual and audible signals to prompt the driver to take manual braking action. When the distance to the vehicle ahead increases to a safe distance, the ACC control unit will control the vehicle to travel at the set speed.
In simple terms, the adaptive cruise control system uses distance information collected by the vehicle’s sensors (radar) to determine the driving state of both the preceding vehicle and its own vehicle (distance and speed). After calculations by the ECU, it sends commands to the actuators (throttle, brakes, gear, etc.) to decide its driving state, whether to accelerate, decelerate, or exit cruise mode and switch back to manual driving. The most basic function of adaptive cruise control is to maintain longitudinal movement of the vehicle, and in the event of a collision risk, the vehicle will alert the driver and initiate active braking intervention.
Currently, ACC is still considered a high-tech feature, primarily available in luxury vehicles like Volvo and BMW. With the continuous development of integrated and electronic chassis components, ACC is expected to become as widely used as the currently popular fixed-speed cruise systems and will play an important role in future active and passive safety integration.
As mentioned above, the role of sensors in the ACC system is evident. During vehicle operation, the distance sensor (radar) installed at the front of the vehicle must continuously scan the road ahead. Commonly used sensors include radar (long-range millimeter-wave radar and laser radar), ultrasonic distance sensors, infrared distance sensors, and video sensors.
In the ACC system, sensors act as the “eyes” of the driver. For the eyes, it is crucial to identify the vehicle in the same lane while excluding the influence of vehicles in adjacent lanes. If driving on urban roads, it must also recognize pedestrians and other potential targets that may appear on the road.
Once the eyes receive signals, they are transmitted to the ACC cruise control system in the vehicle’s brain, which queries a series of regulations to determine how the vehicle should operate. These regulations are the control strategies within the ACC.
The safe following distance model (which determines how much distance is appropriate to maintain from the vehicle ahead) is one of the main control strategies of the ACC system. It cannot be too large, or it will provoke complaints from following vehicles; nor can it be too small, or there will be a risk of rear-end collisions. The safe distance is a function of the minimum stopping distance and the current vehicle speed. The safe distance is not a fixed length but rather a concept known as TTC (time to collision), which estimates the time required for a rear-end collision if the current relative speed is maintained.
After the brain has instructed the vehicle on what to do, it is up to the actuators to execute the commands, which act as the “hands and feet” of the vehicle. The actuators include the throttle, brakes, and gear. Through the actions of these components, the vehicle is controlled.
Compared to other automotive electronic control technologies, the ACC system is still somewhat immature, with challenges in adapting to road conditions.
As a driving aid, adaptive cruise control cannot achieve the same level of intelligence as a human driver, capable of discerning all road conditions and making optimal timely responses. Currently, ACC is mainly used on well-maintained roads (highways or elevated roads) and primarily focuses on detecting target vehicles in the main lane. It is still insufficient in monitoring vehicles in adjacent lanes and predicting the intentions of vehicles that intend to change lanes. For example, if a vehicle ahead suddenly enters a curve, the ACC may mistakenly perceive a safe distance as too large and accelerate into the curve.
Here are some analyses of typical road conditions:
1. When there are no vehicles ahead, ACC will cruise at a set speed (within the speed limit you have set);
2. When a vehicle appears within the radar monitoring range, if the speed is too high, the vehicle will decelerate and follow the vehicle ahead at a safe distance; if the vehicle ahead changes lanes, the ACC will automatically accelerate to the set speed.
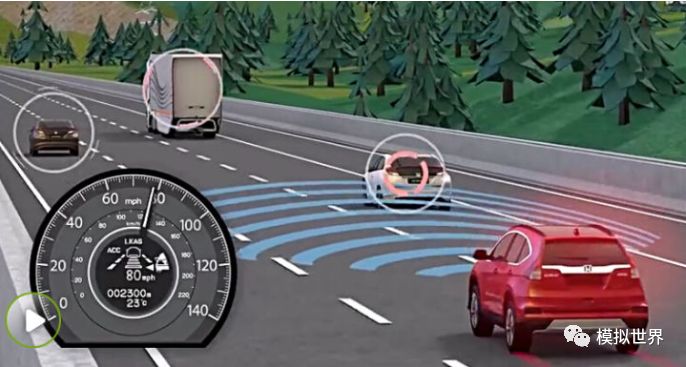
In the ACC cruise control system, for fixed-speed cruise status, the control unit has two input signals. When the measured actual speed is higher or lower than the speed set by the driver, the control unit compares these two signals to determine the difference, known as the error signal. After amplification and processing, this becomes the throttle control signal sent to the throttle actuator, driving it to adjust the engine throttle opening to correct the error between the two input speed signals, thus quickly restoring the actual speed to the driver’s set speed and maintaining it constant. As shown in the figure below, when there are no vehicles in the lane ahead, the speed is 80 km/h, maintaining fixed-speed cruise.
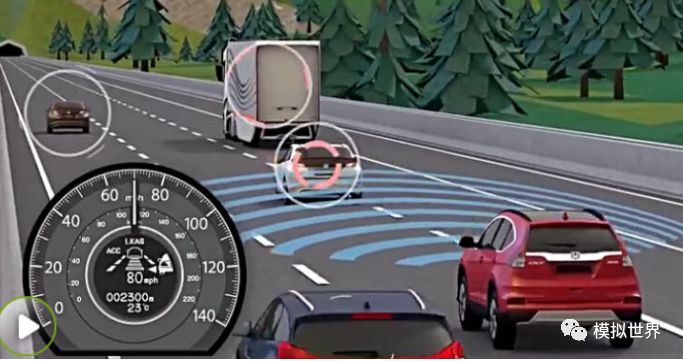
In the next figure, when a vehicle appears in the lane ahead, ACC performs adaptive cruise control, adjusting the speed based on the speed of the vehicle ahead and the distance to it.
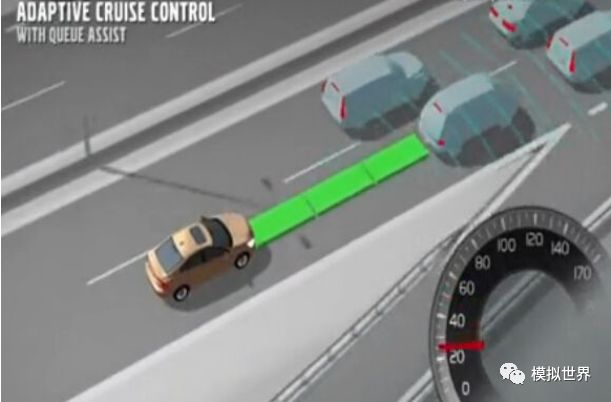
When the vehicle ahead changes direction, the ACC will switch its target vehicle. Additionally, some ACC systems with stop-and-go functionality (automatic start-stop systems) can be activated even at low speeds or when stationary, which is particularly useful in stop-and-go urban conditions. This system can maintain a safe distance from the vehicle ahead even at low speeds and can brake the vehicle until it comes to a stop. After a few seconds, if the vehicle ahead starts moving, the ACC will automatically follow suit; if the stop time is prolonged, the driver only needs to lightly press the pedal to re-enter cruise mode.
To implement ACC with stop-and-go functionality, camera assistance is typically required, as while radar has strong target recognition capabilities, it is significantly affected by interference. The camera’s image recognition capabilities are needed to confirm targets. Products from Mobileye can even achieve ACC using only cameras. Furthermore, after following a vehicle to a stop, most manufacturers require driver confirmation before the vehicle can restart, which can be done via a button or by pressing the accelerator. The following figure shows urban conditions with a speed of 25 km/h.
The following figure shows that when stopped at a red light, the vehicle can automatically brake to a stop, and when the vehicle ahead starts moving, it will automatically follow.

If entering a curve, the vehicle will adjust its speed based on the curve’s conditions; long-range radar has a limited field of view, and if the curve radius is too large, it may lose the target. Therefore, the highest level of ACC currently only requires performance for curves with a radius of over 150m.
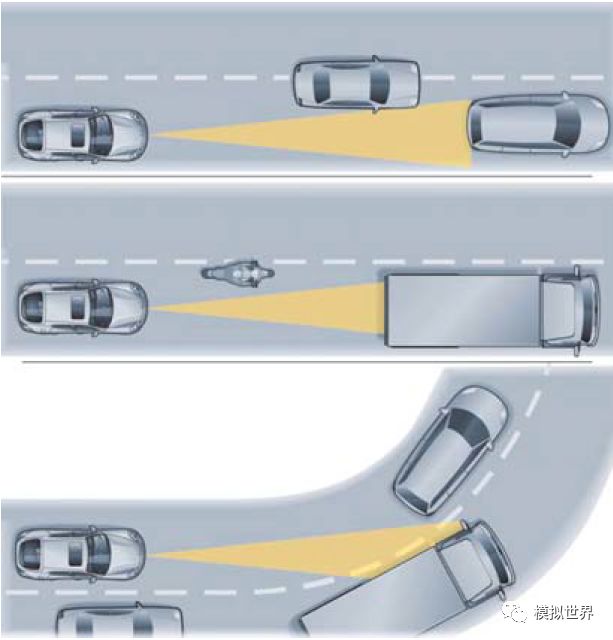
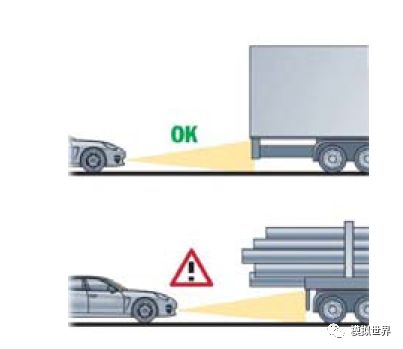
If the radar sensor of the adaptive cruise control system can only detect objects within a narrow conical area directly in front of the vehicle, the detection of obstacles may be limited. The system may not be able to brake in time or may brake unexpectedly.
If other vehicles are entering and exiting the lane of the ACC vehicle, those vehicles will only be detected when they are fully within the corresponding lane. Sometimes, very narrow or small vehicles may not be detected or may not be detected in time. If a large vehicle (e.g., a timber transport truck) is present, the system may not correctly detect the rear of that vehicle.
Regarding the advantages of ACC, it is clear that, to some extent, ACC can reduce driver fatigue. The ACC system, combined with lane departure assistance systems, can greatly relieve the driver’s feet and even hands in favorable urban conditions.
As an intelligent driving technology, ACC will be a future direction for automotive development, much like autonomous driving. However, machines are still machines and cannot completely replace humans; even the most intelligent driving is merely a driving aid and should not be fully relied upon or trusted. (Source: Simulation World)
Further Reading
☞ In-depth Analysis of LiDAR for Autonomous Driving
☞ How Tech Companies Are Seizing the Autonomous Driving Opportunity
☞ Timeline for Advancing Autonomous Driving and Key Milestones in Five Technology Areas
☞ Empowering Autonomous Driving Players: Progress of Baidu Apollo’s “Tiger Painting” Plan
☞ How Should China’s Smart Vehicles Develop? Waymo’s Autonomous Driving Safety Report May Serve as a Reference
☞ GAC Group Partners with Pony.ai to Deepen Autonomous Driving Layout
☞Three Types of Companies Competing in the L3 Autonomous Driving Market Expected to Explode in 2020
☞Annual Production Capacity of 10 Million Units: Quanergy to Build the World’s Largest Production Base in China
☞ Comparative Analysis of Autonomous Vehicle Technology Patents Between Baidu and Google
☞ Which Three Companies Hold the Future of the Autonomous Driving Market?
☞ From “Post-90s Youth Group” to IT Giants: A Look at the “New Faces” in the Intelligent Driving Field in 2017
☞ Alibaba’s First Comprehensive Public Display of AI Layout (Including Layout Map/Report Card/Six Industry Details)
☞ Supporting 5G: A Review of 2017’s 5G Network Layout by Various Institutions
☞ In-depth: Detailed Explanation of the Autonomous Vehicle Testing Demonstration Zone in the United States
