Embedded development, especially in SOA (Service Oriented Architecture), often encounters a scenario where part of the business functionality is developed in C and is relatively mature, and there is a desire to reuse it directly. However, the underlying services obtained by the business layer are written in C++. If both need to be placed in a single process, the corresponding source code of C and C++ needs to be cross-compiled to generate an executable file. This article discusses cross-compiling C and C++.
1. Differences Between C and C++
First, we know that C is a procedure-oriented (PO) programming language, while C++ is an object-oriented (OO) programming language. C++ can be seen as a superset of C, incorporating more features.
(1) Differences Between PO and OO
-
Advantages of PO: Higher efficiency, as PO languages (e.g., C) do not require object instantiation, consuming fewer resources;
-
Disadvantages of PO: Poor portability and high maintenance costs.
-
Advantages of OO: High reusability and low maintenance costs;
-
Disadvantages of OO: Lower efficiency, as an object must be instantiated before use.
2. Compilation Principles
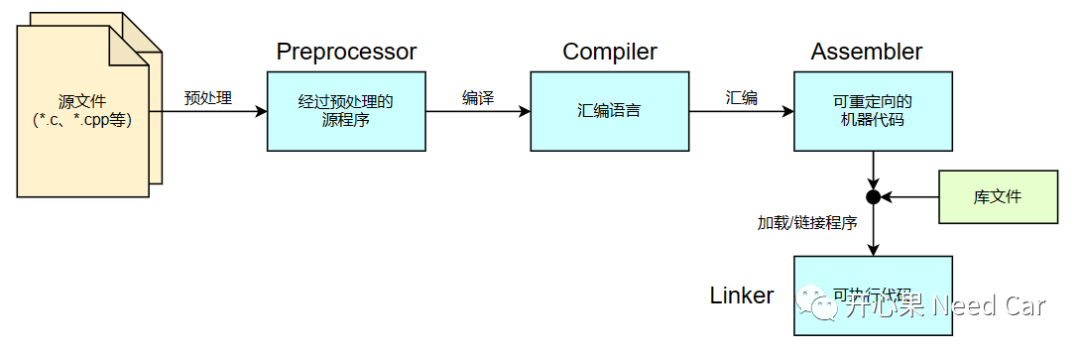
Regardless of whether it is C or C++, these high-level languages, which are easy for humans to read, ultimately need to be compiled into machine-readable binary language.
The preprocessing is handled by the preprocessor, which removes comments, includes header files or packages, and replaces macro definitions in the source files (*.c, *.cpp, etc.).
(2) Compilation
In the assembly stage, the compiler translates the preprocessed high-level language into machine-readable assembly language.
(3) Assembly
The assembler converts the assembly language into machine language (binary file) and performs relocation. The loader then places the relocated instructions and data into specified memory locations.
(4) Linking
Finally, the linker combines multiple relocatable machine code files (including library files) to create an executable file.
The compilation process is illustrated as follows:
3. Cross-Compiling C and C++ Using CMake

#ifndef _CAL_H_#define _CAL_H_
typedef int(*calOpt)(int, int);
#ifdef __cplusplus extern "C" { #endif
extern int add(int x,int y);
#ifdef __cplusplus } #endif
#endif#include "Cal.h"
int add(int x,int y){ return (x + y);}# Find all source files in the current directory and save the names to the CUR_DIR_SRCS variable
aux_source_directory(. CUR_DIR_SRCS)
# Generate the library
add_library (Cal ${CUR_DIR_SRCS})
target_include_directories(Cal PUBLIC "../include/")#include <iostream>
#include "Cal.h"
int main(){
int result; calOpt optFunc = add; /* Call add function through function pointer */ result = optFunc(0x10, 0x20);
std::cout << "result = " << result << std::endl; return 0;}# Minimum required version of cmake
cmake_minimum_required(VERSION 3.10)
# Set project name and version
project(CMake_Pro)
# Set C++ standard version
set(CMAKE_CXX_STANDARD 11)
set(CMAKE_CXX_STANDARD_REQUIRED True)
set(ENV{myEnvVar} "80")
MESSAGE(STATUS "myEnvVar: $ENV{myEnvVar}")
# Add src subdirectory
add_subdirectory(src)
# Compile source code to generate target
add_executable(CMake_Pro main.cpp)
# Include header file path
target_include_directories(CMake_Pro PUBLIC "./include/")
# Add library link
target_link_libraries(CMake_Pro Cal)@echo off
set buildDir=build
@REM Create the build folder if it does not exist
if not exist %buildDir% md %buildDir%
if exist %buildDir% cd %buildDir%
echo "***************: Execute cmake ***************"
cmake -G"Unix Makefiles" ../
echo "***************: Execute make ***************"
make
pause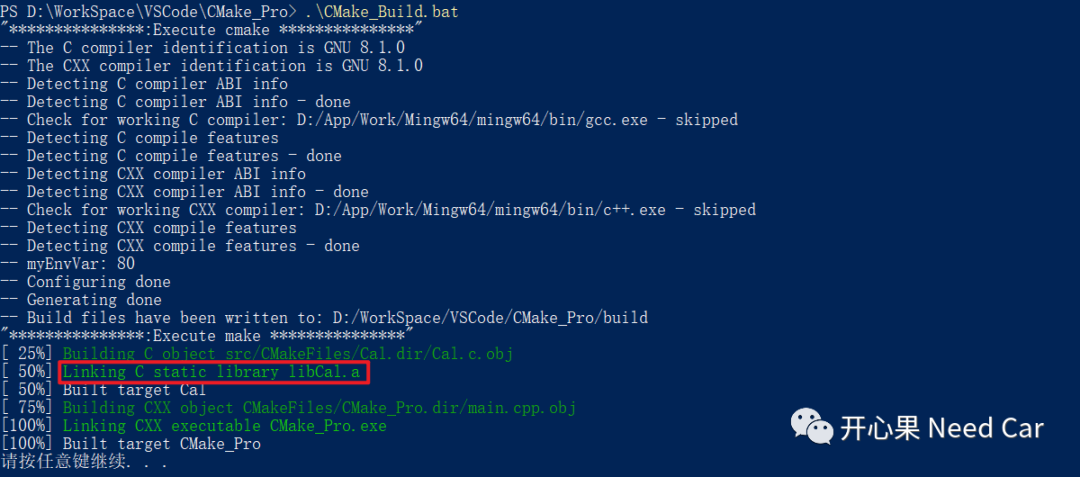

Previous Highlights
Summary of previous exciting articles on Autosar: 151~200
Overview of DDS and DCPS ModelTRACE32: Multi-core Debugging Configuration
Autosar EcuM: Analysis of APP from RUN to POST_RUN
Autosar Network Management: Can CAN FD Frame Wake Up the Network?
Embedded Development: WWD of TLF35584 External Dog
Embedded Development: Understanding ECU Wake-up, Sleep, and Reset?
Basics of C Language: The Use of do{…}while(0), Quite Elegant
Autosar EcuM: ECU Startup and Shutdown Process
Ethernet Notes: Fast Ethernet 100Base-TX Interface and Encoding
Click below to follow, let’s discuss Autosar/embedded systems together. If needed, contact the author to join the group for more professional answers.