Algorithms are the methods and steps to solve problems, while hardware is the effective way to test the quality of algorithms and implement them.
If you want to become a master in the field of mobile robotics, a solid foundation in the combination of algorithms and hardware is essential.
Practical case – Creating an Autonomous Aerial Robot, will be our “best secret” for integrating algorithms with hardware and enhancing engineering practice abilities.
However, the biggest challenge in creating an autonomous aerial robot is that during the entire operation process, we will encounter many interdisciplinary knowledge and comprehensive applications:
In addition to hardware knowledge such as mechanical drawing, circuit design, component selection, soldering, and wiring, we also need to learn some tools to facilitate our algorithm testing (such as ROS Robot Operating System, Integrated Development Environment IDE, C++, and Python, etc.).
It seems that without a solid foundation, it is difficult to complete such a daunting and complex task, but this is not the case.
You just lack a guide and a detailed and comprehensive tutorial.
Big benefits ahead!!!
Deep Blue Academy invites Teacher Gao Fei as the main lecturer, in collaboration with Zhejiang University Fast Lab, to produce a set of “Creating Autonomous Aerial Robots from Scratch” tutorials! Now open to all robotics enthusiasts for free! (Yes, you read that right, it’s 0 yuan)
(Creating Autonomous Aerial Robots – Section 4: Flight Control Settings and Test Flight)
There are always friends struggling to perfectly combine algorithms and hardware. To solve this problem, Deep Blue Academy, in collaboration with Zhejiang University Fast Lab, has refined “Creating Autonomous Aerial Robots from Scratch”, helping everyone familiarize themselves with the entire process from hardware assembly to algorithm implementation for aerial robots.

(Creating Autonomous Aerial Robots – Section 7: Onboard Computer Environment Configuration)
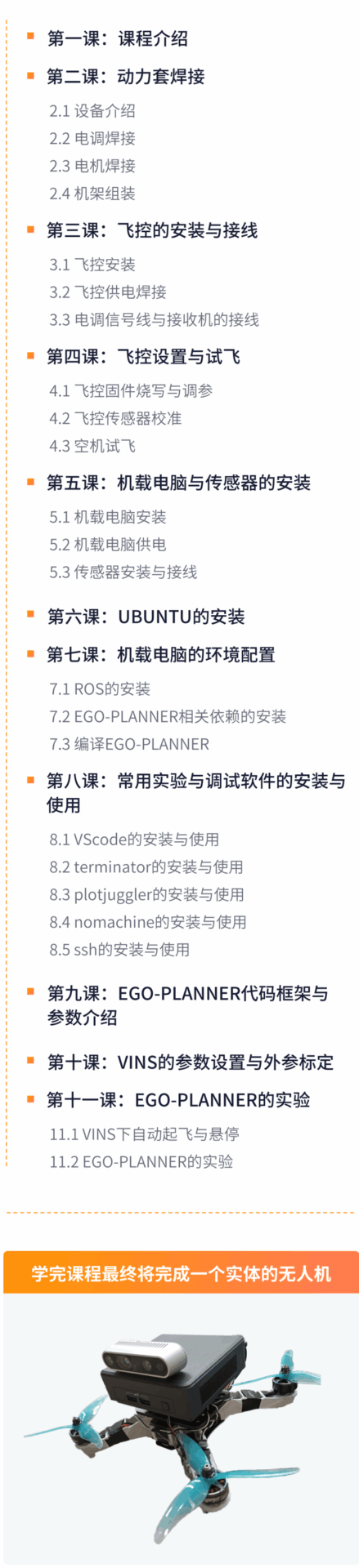
In this course, the teacher will comprehensively teach everyone the detailed process from hardware selection and assembly, onboard computer environment configuration to code deployment and real machine experiments, on how to assemble a fully personalized rotary-wing drone from scratch.
Add customer service to receive the course for free and join the discussion group
Remember to note429 for priority access~

(Below is a fast-track course introduction, for more exciting content please consult customer service)
Free courses, solid content, quality service
Even though it is a free course, this set of courses is still solid, containing a total of 11 sessions of valuable content.
Moreover, the accompanying course provides a discussion group for brainstorming with drone enthusiasts from all over the country!
Students who complete this tutorial will not only gain a DIY autonomous intelligent drone but also greatly enhance their engineering capabilities! This will add value to their resumes~

(Creating Autonomous Aerial Robots – Section 3: Flight Control Installation + Wiring)
All friends can experience the entire process of deploying positioning, perception, and other algorithms by making drones, and practice the perfect combination of algorithms and hardware~
Gao Fei – Associate Researcher at the College of Control, Zhejiang University, PhD Supervisor at the Huzhou Research Institute of Zhejiang University, Technical Leader of FAST Lab
Dr. Gao Fei’s research directions include aerial robots, swarm robots, motion planning, environmental perception, sensor fusion, SLAM, etc.
Yu Huan – Research Assistant at FAST Lab
PhD student at the Robotics Institute of Zhejiang University, specializing in motion planning for mobile robots.
Pan Neng – Master’s student at Zhejiang University FAST-LAB
Graduated with a major in automation from Zhejiang University, with a strong interest and certain experience in motion planning and system integration for aerial robots.