Source: One Linux
GIF source: www.parlezvoustech.com
1. Common Hardware Communication Protocols?
Serial Communication Protocols
-
UART (Universal Asynchronous Receiver Transmitter):
-
Asynchronous serial communication protocol that does not require a clock signal, commonly used for simple point-to-point communication.
SPI (Serial Peripheral Interface):
-
Synchronously used for high-speed communication between microcontrollers and external devices such as sensors and storage devices.
-
Includes a master device and one or more slave devices, synchronizing data transfer through a clock signal.
I2C (Inter-Integrated Circuit):
-
A synchronous multi-master multi-slave serial communication protocol, often used for short-distance communication between low-speed devices.
-
Uses two signal lines (SDA and SCL) for data transfer and clock synchronization.
RS-232:
-
An early serial communication standard, commonly used for connections between computers and external devices (such as modems and printers).
-
Uses single-ended signal transmission, supporting longer transmission distances.
RS-485:
-
An improved serial communication standard suitable for multipoint communication systems, supporting longer transmission distances and higher data rates.
-
Uses differential signal transmission to improve anti-interference capability.
Parallel Communication Protocols
-
PCI (Peripheral Component Interconnect):
-
A high-speed serial computer expansion bus standard widely used for connections between various components inside a computer (such as graphics cards and storage devices).
-
Provides high data transfer rates and low latency.
ATA/IDE (Advanced Technology Attachment/Integrated Drive Electronics):
-
An early hard disk drive interface standard that uses parallel data transmission.
SATA (Serial ATA):
-
The serial version of the ATA interface, widely used to connect hard drives and SSDs, with higher data transfer rates.
Wireless Communication Protocols
-
Bluetooth:
-
A short-range wireless communication protocol commonly used for data transfer between mobile devices, computers, and peripherals.
Wi-Fi (Wireless Fidelity):
-
A commonly used wireless local area network (WLAN) technology that supports wireless data transfer between devices.
Zigbee:
-
A low-power, low-data-rate wireless communication protocol commonly used for communication between Internet of Things (IoT) devices.
NFC (Near Field Communication):
-
A short-range wireless communication technology commonly used for mobile payments, access control, and other applications.
Industrial Communication Protocols
-
Modbus:
-
A widely used serial communication protocol in industrial automation systems that supports master-slave communication mode.
CAN (Controller Area Network):
-
A serial communication protocol used in automotive and industrial automation that supports multi-master mode and high-reliability data transmission.
PROFINET:
-
A Ethernet-based industrial communication protocol widely used in industrial automation and control systems.
Other Common Protocols
-
USB (Universal Serial Bus):
-
A widely used general serial communication protocol between computers and external devices, supporting hot-swapping and plug-and-play.
HDMI (High-Definition Multimedia Interface):
-
A digital video and audio transmission standard widely used for high-definition televisions, monitors, and other multimedia devices.
Ethernet:
-
A wired communication standard for local area networks (LAN), supporting high-speed data transmission and multipoint communication.
2. Synchronous and Asynchronous Communication?
Synchronous and asynchronous communication are two different data transmission methods, mainlydistinguished by the use of clock signals.
Synchronous Communication
Characteristics:
-
Shared Clock Signal: The sender and receiver share a clock signal used for synchronizing data transmission.
-
Data Synchronization: Each data bit’s transmission is guided by the clock signal, and the receiver determines the data reading moment based on the clock signal.
Advantages:
-
High Transmission Efficiency: Due to clock synchronization, the data transmission rate is higher.
-
Strong Reliability: The clock signal makes data reception and transmission more precise.
Disadvantages:
-
Complexity: Requires additional clock lines, complicating circuit design.
-
Distance Limitations: The accuracy of the clock signal may decrease with increased distance.
Application Scenarios:
-
SPI, I2C (Although I2C also supports asynchronous features, its clock line is used for synchronization).
Asynchronous Communication
Characteristics:
-
No Shared Clock: The sender and receiver do not share a clock signal but use start and stop bits to identify data frames.
-
Self-Contained Timing: Each data frame synchronizes itself through its own start and stop signals.
Advantages:
-
Simple Design: No clock lines are required, reducing hardware complexity.
-
Flexibility: Suitable for low-speed, long-distance communication.
Disadvantages:
-
Lower Efficiency: Due to the need to add start and stop bits, the actual data transmission rate may decrease.
-
Error Accumulation: Long-term transmission may lead to synchronization errors.
Application Scenarios:
-
UART, RS-232.
-
Synchronous Communicationis suitable for scenarios requiring efficient, high-speed data transmission but usually requires additional hardware support.
-
Asynchronous Communicationis suitable for simple low-speed applications, easy to implement and debug.
3. UART Serial Communication?
UART (Universal Asynchronous Receiver/Transmitter,Universal Asynchronous Transceiver) is a hardware device used for serial communication. UART is used for serially transmitting and receiving data, widely applied in data communication between computers and peripheral devices.
1. Basic Concepts:
-
Asynchronous Communication: No clock signal, the sender and receiver must agree on the baud rate (transmission rate).
-
Baud Rate: The number of bits transmitted per second, commonly used baud rates include 9600, 115200, etc.
-
Data Frame Structure: Includes start bit, data bits, optional parity bit, and stop bit.
2. Data Frame Structure:

3. Communication Methods:
-
Full Duplex: Can send and receive simultaneously (two independent channels).
-
Half Duplex: Sending and receiving cannot occur simultaneously.
-
Simplex: Data can only be transmitted in one direction.
4. Implementation Methods:
-
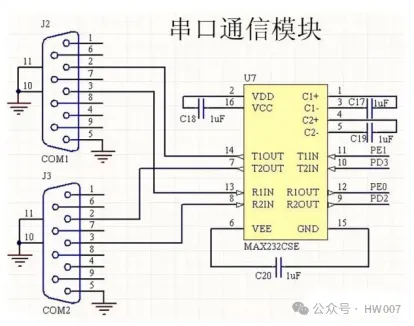
Hardware Implementation: Achieved through MCU or dedicated UART chips (like MAX232).
-
Software Implementation: Simulating UART communication through software, suitable for systems without hardware UART modules.
5. Applications:
-
Embedded Systems: Such as communication between microcontrollers and sensors, modules.
-
Computer Peripherals: Such as connections with mouse, keyboard, modem, etc.
-
Debugging and Programming: Debugging embedded devices or downloading programs through serial port.
4. IIC Communication?
I²C (Inter-Integrated Circuit) is a commonly used serial communication protocol designed for short-distance interconnection of low-speed devices. Developed byPhilips (now NXP) in the 1980s, I²C is now widely used in embedded systems for connecting microcontrollers, sensors, displays, and other peripheral devices.
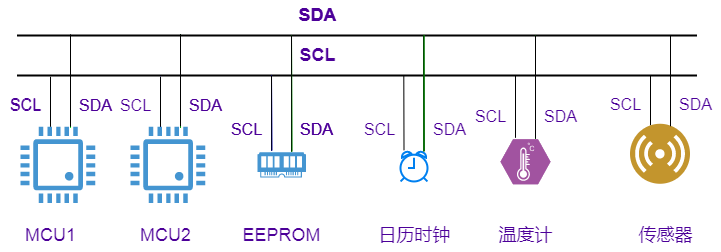
I²C Basic Concepts
I²C is a dual-line serial bus system with a multi-master-slave architecture, consisting ofmaster devices and slave devices. Communication is done through two lines:
-
SCL (Serial Clock Line): Clock line, clock signal generated by the master device.
-
SDA (Serial Data Line): Data line used for data transmission.
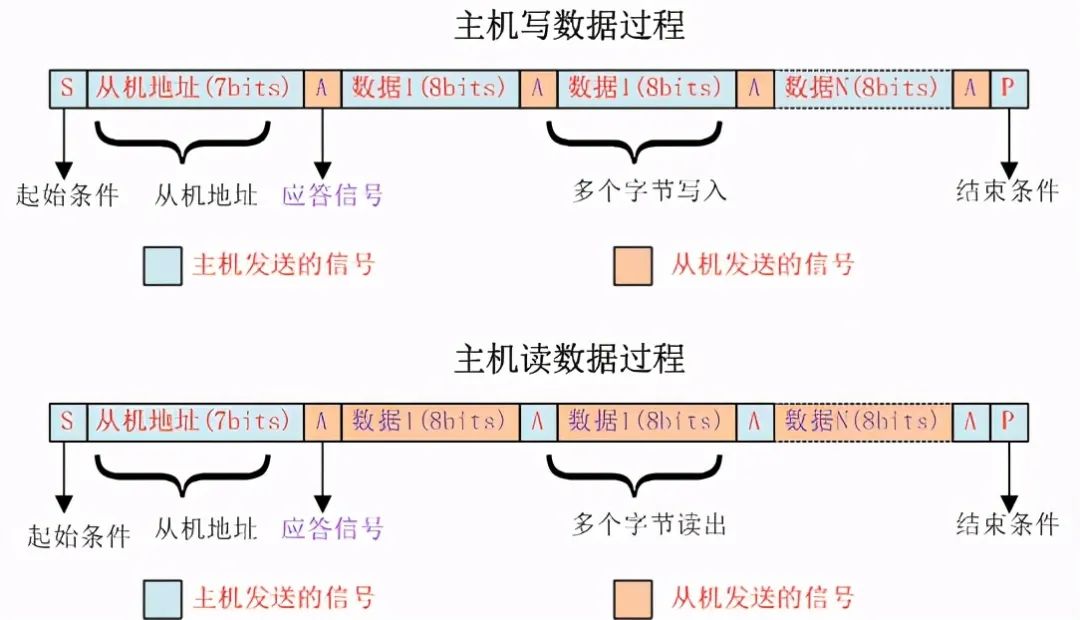
Data Transfer
I²C uses 7-bit or 10-bit addresses for device addressing, transmitting data in bytes. The specific transfer steps are as follows:
-
Start Condition:The master device pulls the SDA line low, then pulls the SCL line low, indicating the start of communication.
-
Address Transmission:The master device sends the address of the slave device and indicates the read/write operation.
-
Data Transmission:The data transfer between master and slave devices. Each byte is followed by an acknowledgment bit (ACK/NACK).
-
Stop Condition:The master device pulls the SCL line high, then pulls the SDA line high, indicating the end of communication.
I²C Device Address
Each I²C slave device has a unique 7-bit or 10-bit address. The 7-bit address is more widely used, and during actual transmission, the address is shifted left by one bit, with the rightmost bit indicating the read/write operation (0 for write, 1 for read).
I²C Communication Protocol
-
Start Condition: The master device pulls SDA from high to low while keeping SCL high.
-
Stop Condition: SDA goes from low to high while SCL is high.
-
Byte Data Transmission: After transmitting a byte of data, the receiver must send an acknowledgment bit (ACK).
-
Read/Write Operation: The master device sends the device address followed by a read/write bit, where 0 indicates write and 1 indicates read.
I²C Advantages
-
Simple Hardware Interface: Only two lines are needed for communication.
-
Multi-Master-Slave Architecture: Allows multiple master and slave devices to share a single bus.
-
Flexibility: Supports multiple devices working together, and devices can be hot-swapped.
I²C Disadvantages
-
Lower Speed:The maximum speed in standard mode is 100kHz, fast mode is 400kHz, and higher speeds (up to 5MHz) require special high-speed modes.
-
Distance Limitations:Typically suitable for internal PCB or short-distance communication.
-
Bus Contention:When the bus is idle, multiple master devices may try to start communication simultaneously.
5. SPI Communication?
SPI Basic Concepts
-
MOSI (Master Out Slave In): Master device output, slave device input. -
MISO (Master In Slave Out): Master device input, slave device output. -
SCLK (Serial Clock): Clock line generated by the master device. -
SS/CS (Slave Select/Chip Select): Slave device select line controlled by the master device to select a specific slave device.
Data Transfer
-
The master device drives the CS line low, selecting the slave device. -
The master device generates the SCLK clock signal. -
Data is synchronously transmitted through the MOSI and MISO lines. -
Data is sampled based on the rising or falling edge of the clock. -
After transmission is complete, the master device drives the CS line high, ending communication.
SPI Clock Phase and Polarity
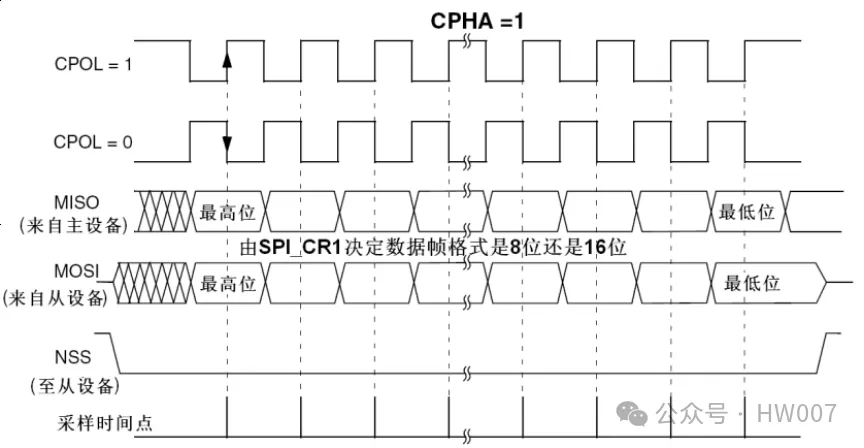
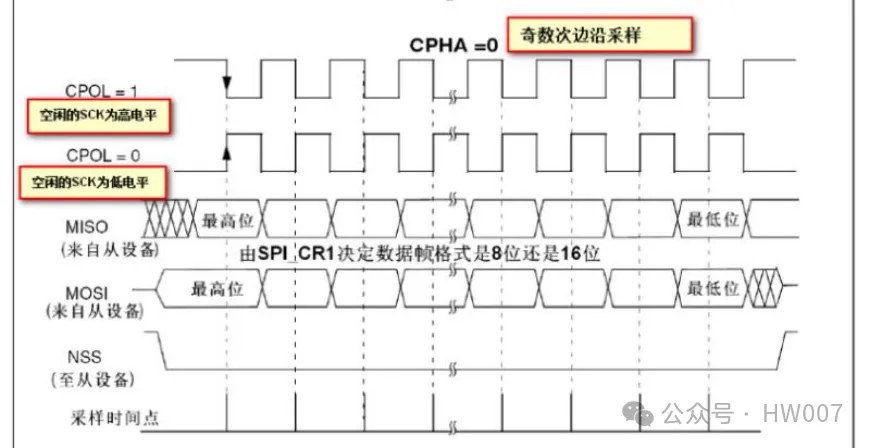
-
CPOL = 0, CPHA = 0: Clock signal is low when idle, sampling data on the first rising edge. -
CPOL = 0, CPHA = 1: Clock signal is low when idle, sampling data on the first falling edge. -
CPOL = 1, CPHA = 0: Clock signal is high when idle, sampling data on the first falling edge. -
CPOL = 1, CPHA = 1: Clock signal is high when idle, sampling data on the first rising edge.
SPI Advantages
-
High-Speed Transmission: Faster than I²C communication speed, suitable for high data rate transmission. -
Full-Duplex Communication: Can send and receive data simultaneously. -
Simple Hardware Implementation: Does not require complex arbitration mechanisms.
SPI Disadvantages
-
More Wires: Requires at least four lines, increasing wiring complexity. -
Lack of Standardization: Different devices’ SPI implementations may vary, requiring careful reading of device manuals.
6. RS-232 External Communication?
RS-232 (Recommended Standard 232) is aserial communication standard initially established by EIA (Electronic Industries Association) in the 1960s. It is widely used for communication between computers and external devices (such as modems, printers, and industrial equipment). Although RS-232 is less used in modern consumer electronics, it remains important in industrial automation and certain specialized devices.
RS-232 Basic Concepts
RS-232 isasynchronous serial, full-duplex communication,established by the Electronic Industries Association (EIA), and is one of the communication interfaces on personal computers, typically appearing with 9 pins (DB-9), with transmission distances usually over a dozen meters.
RS-232 Signals
The RS-232 interface defines various signal lines, the most commonly used are:
-
TXD (Transmit Data): Transmit data line.
-
RXD (Receive Data): Receive data line.
-
GND (Ground): Ground line.
-
RTS (Request to Send): Request to send.
-
CTS (Clear to Send): Clear to send.
-
DTR (Data Terminal Ready): Data terminal ready.
-
DSR (Data Set Ready): Data set ready.
-
DCD (Data Carrier Detect) (Data Carrier Detect): Data carrier detection.
-
RI (Ring Indicator): Ring indicator.
RS-232 Electrical Characteristics
The signal voltages defined by RS-232 are as follows (negative logic):
-
Logic 1 (Mark): -3V to -15V.
-
Logic 0 (Space): +3V to +15V.
Any level between -3V and +3V is considered an uncertain state.
Data Transmission
RS-232 uses asynchronous communication, with no clock signal. Data transmission is conducted through a data frame consisting of start bit, data bits, optional parity bit, and stop bit:
-
Start Bit: Usually 1 bit, indicating the start of data transmission, logical low level.
-
Data Bits: Usually 5 to 8 bits, representing the actual transmitted data.
-
Parity Bit: Optional, used for error detection, generally includes odd parity and even parity.
-
Stop Bit: Usually 1 or 2 bits, indicating the end of a data frame, logical high level.
RS-232 Transmission Speed
RS-232 baud rates (transmission speeds) can range from 300bps to 115200bps, with typical values including 9600, 19200, 38400, 57600, and 115200bps.
RS-232 Applications
RS-232 is widely used for:
-
Computer and Modem: Old-fashioned dial-up internet.
-
Industrial Automation Equipment: Communication between PLCs, sensors, and controllers.
-
Embedded Systems: Used for debugging and communication.
-
Medical Devices: Such as data collection and monitoring devices.
7. RS485 Communication
RS-485 is aserial communication standard for multipoint, differential signal transmission, widely used in industrial automation, building automation, and other applications requiring reliablelong-distance data transmission. Compared to RS-232, RS-485 offers stronger anti-interference capability and longer transmission distances.
RS-485 Basic Concepts
Differential Signals
RS-485 uses differential signal transmission, transmitting data through two lines (A and B). The advantages of differential signals include:
-
Strong Anti-Interference Capability: Since the receiver detects the voltage difference between the two lines rather than single-ended voltage, it has better resistance to noise.
-
Long Transmission Distance: Typical transmission distances can exceed 1200 meters.
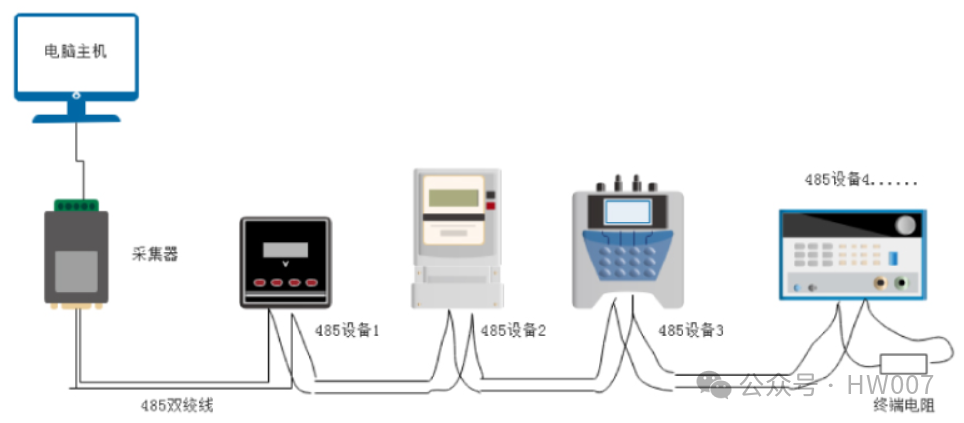
Multipoint Communication
RS-485 supports multipoint communication, meaning multiple devices can connect on the same bus, with a common configuration being master-slave mode. Up to 32 devices can be connected on one RS-485 bus, and more devices can be connected using extenders.
RS-485 Electrical Characteristics
-
Logic 1: A line voltage is lower than B line voltage, typically with a voltage difference of +(2~6)V between the two lines.
-
Logic 0: A line voltage is higher than B line voltage, typically with a voltage difference of -(2~6)V between the two lines.
ForDrivers (Transmitters), Logic 1 (Positive) is A>B, with a voltage between A and B of +2~+6V, while Logic 0 (Negative) is A
ForReceivers, Logic 1 (Positive) is B>A, with a voltage between B and A not less than 200mV, while Logic 0 is A>B, with a voltage between A and B less than -200mV, indicating positive and negative logic, with absolute voltage values greater than 200mV.
RS-485 Communication Modes
Half Duplex
-
Data can only be transmitted in one direction, requiring protocol or hardware control to switch between sending and receiving.
-
Common Connections: Two differential lines (A and B), one ground line (GND).
Full Duplex
-
Data can be transmitted simultaneously in both directions, requiring four lines (two pairs of differential lines).
-
Common Connections: Four differential lines (A, B, Y, Z), one ground line (GND).
RS-485 Typical Applications
RS-485 is widely used in scenarios requiring long-distance, reliable transmission, such as:
-
Industrial Automation: Communication between PLCs, sensors, and actuators.
-
Building Automation:HVAC systems, access control, lighting control.
-
Serial Device Interconnection: For example, device communication under the Modbus protocol.
-
Remote Data Collection: Such as data collection in SCADA systems.
8. Modbus Protocol
Modbus Basic Concepts
-
Modbus RTU (Remote Terminal Unit): Based on binary transmission, usually used for RS-232, RS-485, and other serial communications. -
Modbus ASCII: Based on ASCII character transmission, also used for serial communication but relatively less common. -
Modbus TCP/IP: Ethernet-based communication suitable for local area networks and internet environments.
Modbus Data Model
-
Discrete Inputs (Discrete Inputs): Read-only unit inputs (bits). -
Coils: Readable and writable unit outputs (bits). -
Input Registers: Read-only 16-bit inputs. -
Holding Registers: Readable and writable 16-bit registers.
Modbus Function Codes
-
Read Coils (0x01): Read the status of a group of coils. -
Read Discrete Inputs (0x02): Read the status of a group of discrete inputs. -
Read Holding Registers (0x03): Read the contents of a group of holding registers. -
Read Input Registers (0x04): Read the contents of a group of input registers. -
Write Single Coil (0x05): Write a single coil status. -
Write Single Register (0x06): Write the contents of a holding register. -
Write Multiple Coils (0x0F): Write the status of multiple coils. -
Write Multiple Registers (0x10): Write the contents of multiple holding registers.
Modbus Data Frame
-
Address Field (1 byte): Specifies the slave address. -
Function Code (1 byte): Specifies the operation type. -
Data Field (N bytes): Contains data for the specific operation, such as register address, value, etc. -
Error Check Code (2 bytes): CRC check code used for error detection.
9. CAN Bus
CAN Basic Concepts
Frame Types
-
Data Frame: Used for transmitting actual data. -
Remote Frame: Requests to send a data frame. -
Error Frame: Reports detected errors. -
Overload Frame: Indicates bus overload.
Data Frame Structure
-
Start of Frame (SOF): Indicates the start of the frame. -
Identifier: Indicates the message’s priority and content. -
Standard Frame (11-bit identifier) -
Extended Frame (29-bit identifier) -
Control Field: Indicates data length and other control information. -
Data Field: Actual data being transmitted, ranging from 0 to 8 bytes in length. -
CRC Field: Cyclic Redundancy Check used for error detection. -
ACK Field: The receiver confirms whether the sender has received correctly. -
End of Frame (EOF): Indicates the end of the frame.
Bit Arbitration
Error Detection
CAN Application Scenarios
-
Automotive Electronics: Body control, power systems, infotainment systems. -
Industrial Automation: Robot control, sensor data collection. -
Medical Devices: Real-time monitoring, diagnostic devices. Aerospace Electronics: Flight control systems.
Reprint Statement: All reprinted articles must indicate the original source or reprint source (if the original source is not indicated at the reprint site), please contact for deletion in case of infringement.