The bus, known in English as “BUS”, is very much like a public bus. The route of a public bus is fixed, and anyone can take the bus to any stop along its route. If we compare people to electronic signals, this is the true meaning behind why it is called “BUS” in English instead of “CAR”. Professionally speaking, a bus is a structural form that describes the transmission lines of electronic signals; it is a collection of signal lines that serves as a public channel for transmitting information between subsystems. Through the bus, information can be transmitted, exchanged, shared, and logically controlled among all components within the system. In a computer system, it serves as the common channel for the CPU, memory, and input/output devices to transmit information. Various components of the host are connected through the host, and external devices are connected to the bus through corresponding interface circuits.
The development of modern network information, especially in terms of cost and space, has made bus transmission a hot topic, replacing point-to-point transmission. Its emergence provides the greatest convenience and the most effective technical solutions for information transmission.
Basic Components of the System Bus
Data Bus: Transmits data information
Address Bus: Transmits address information
Control Bus: Transmits control information (completing bus operation functions)
Power Line: Provides power signals to the system
Functions of the Bus
1. Data Transmission Function
The data transmission function is the basic function of the bus, represented by the bus transmission rate, i.e., the number of bytes transmitted per second, measured in Mbps (megabytes per second).
2. Multi-Device Support Function
Multiple devices use a single bus. First, there is the issue of bus occupation rights; which master device applies for bus usage is determined by the bus arbiter.
3. Interrupt
An interrupt is a mechanism by which a computer responds to urgent matters. When an external device and the master device make a service agreement, the interrupt serves as the contact signal to implement the service agreement.
4. Error Handling
Error handling includes processing errors such as parity errors, system errors, and battery failures, as well as providing corresponding protective measures.
Data Transmission Process of the Bus
1. Request to Occupy the Bus
The bus master device (such as the CPU or DMA controller) that needs to use the bus submits a request to the bus arbitration entity. If the response conditions are met, a response signal is issued, and the bus control for the next bus transmission cycle is granted to the requester.
2. Addressing
The bus master device that has obtained bus control issues the address of the memory and I/O ports to be accessed via the address bus, selects the accessed module through address decoding, and begins data conversion.
3. Data Transmission
The bus master device, also known as the master module, and the accessed device, known as the slave module, operate under the control of the master module to transmit data between the two slave modules via the data bus.
4. Termination
The information from both the master and slave modules is withdrawn from the bus, releasing the bus for use by other master modules.
Types of Microcomputer Buses
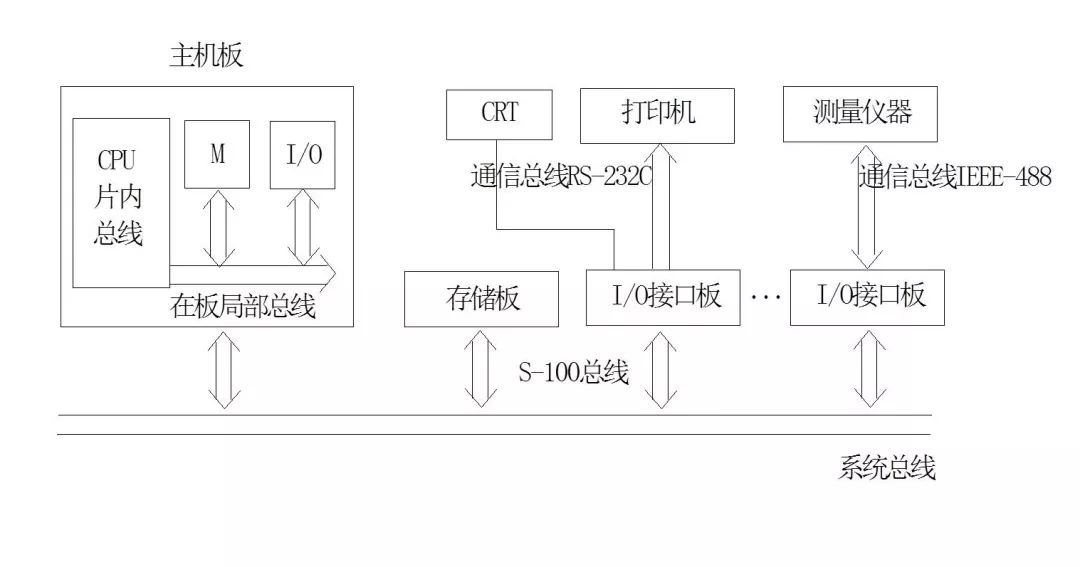
On-Chip Bus
This is the bus located between various unit circuits within large-scale and ultra-large-scale integrated chips, serving as the information pathway between these unit circuits, such as the bus between the CPU’s internal ALU, register group, and controller.
Local Bus (also known as Internal Bus)
This usually refers to the information pathway between various components on the microcomputer motherboard. Since it is a bus within a circuit board, it is also called a local bus on the board. Typical local buses include the IBM-PC bus, ISA bus, EISA bus, VL and PCI buses, etc.
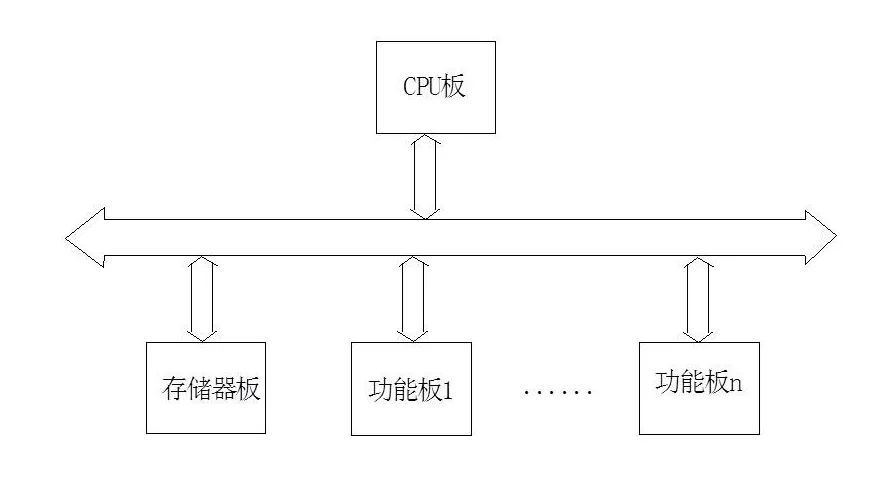
System Bus (also known as External Bus)
This refers to the bus on the microcomputer’s motherboard, used to form communication channels between various plug-in boards and CPU modules in multi-processor systems. Typical system buses include STD-BUS, MULTI-BUS, VME, etc.
Communication Bus
This is the information pathway between microcomputer systems and other instruments or devices. This type of bus is often not exclusive to computers but utilizes existing bus standards from other fields of electronics and applies them. Popular communication buses include EIA-RS-232C, RS-422A, RS-485, IEEE-488, VXI, etc.
Relationships Between Various Buses
Advantages of Using Bus Technology
1. Simplified Software and Hardware Design: Due to the strict definition of the bus, any manufacturer or individual must produce plug-in boards according to its standards. Having these specifications greatly simplifies the hardware design process for users.
2. Simplified System Structure: By using a standard bus, various functional modules (boards) can be conveniently connected on the bus to form the hardware system of the microcomputer.
3. Easy System Expansion: For microcomputer systems built using standard buses, users can design or directly purchase plug-in boards that meet bus standards and user expansion requirements to achieve system expansion.
4. Easy System Updates: With the continuous development of electronic technology and the emergence of new components, microcomputer systems must also be updated continuously. Using new components to replace the original ones on standard bus plug-in boards can conveniently enhance system performance without significant modifications.
Classification of Bus Technology
There are many ways to classify buses, such as dividing them into external and internal buses, system buses and non-system buses, etc.
1. By Function
The most common way to classify data buses is by function, dividing them into address bus, data bus, and control bus. In some systems, the data bus and address bus can be shared under the control of the address latch, meaning they are multiplexed.
The address bus is specifically used to transmit addresses. In the design process, the most common usage is selecting the storage address of external memory from the CPU’s address bus. The number of bits in the address bus often determines the size of the memory storage space. For example, if the address bus is 16 bits, the maximum storage space is 2^16 (64KB).
The data bus is used to transmit data information and can be classified into unidirectional and bidirectional data buses. Bidirectional data buses typically use a tri-state form. The number of bits in the data bus usually matches the word length of the microprocessor. For example, the Intel 8086 microprocessor has a word length of 16 bits, and its data bus width is also 16 bits. In practical work, the data transmitted on the data bus is not necessarily pure data.
The control bus is used to transmit control signals and timing signals. For instance, when the microprocessor operates on external memory, it must first send read/write signals, chip select signals, and interrupt response signals through the control bus. The control bus is generally bidirectional, and the transmission direction is determined by specific control signals, with its bit count depending on the actual control needs of the system.
2. By Transmission Method
Based on the data transmission method, buses can be divided into serial buses and parallel buses (based on various bus technology circuit design collections). In principle, parallel transmission is superior to serial transmission, but it incurs higher costs. In simple terms, parallel transmission is like a multi-lane highway, while serial transmission is akin to a single-lane road. Common serial buses include SPI, I2C, USB, IEEE1394, RS232, and CAN; whereas parallel buses are fewer in variety, with common types being IEEE1284, ISA, PCI, etc.
3. By Clock Signal Method
Buses can be divided into synchronous and asynchronous buses based on whether the clock signal is independent. In synchronous buses, the clock signal is separate from the data, meaning a dedicated line is used as the clock signal line; while in asynchronous buses, the clock signal is extracted from the data, typically using the edges of the data signals as clock synchronization signals.
Basic Principles of Bus Transmission
Based on the previous definition of a bus, it is clear that the basic function of the bus is to transmit signals. To ensure that information from various subsystems can be transmitted effectively and promptly, and to avoid mutual interference between signals and excessive physical space congestion, the best approach is to adopt multiplexing technology. Thus, the basic principle of bus transmission is multiplexing technology. Multiplexing refers to a mechanism where multiple users share a common channel. Currently, the most common types include time-division multiplexing, frequency-division multiplexing, and code-division multiplexing.
Time-Division Multiplexing (TDMA)
Time-division multiplexing divides the channel into multiple time slots. Signals from different sources require responses within different time slots, and the transmission times of each signal do not overlap on the time axis.
Frequency-Division Multiplexing (FDMA)
Frequency-division multiplexing divides the available frequency band of the channel into several non-overlapping frequency bands. Each signal, after frequency modulation, occupies one of these frequency bands, thus allowing multiple signals of different frequencies to be transmitted over the same channel. When the receiving end receives the signal, it uses appropriate band-pass filters and frequency demodulators to recover the original signal.
Code-Division Multiplexing (CDMA)
Code-division multiplexing assigns specific identification codes or address codes to each transmitted signal. The receiving end distinguishes the transmitted information on the common channel based on different identification or address codes, and only information with matching identification or address codes will be received.
Main Technical Indicators of the Bus
The main technical indicators for evaluating a bus are its bandwidth (i.e., transmission rate), data bit width (bit width), operating frequency, and the reliability and stability of the transmitted data.
Bandwidth (Transmission Rate), Bit Width, and Operating Frequency
The bandwidth of the bus refers to the amount of data transmitted on the bus per unit time, i.e., the maximum data transfer rate in MB per second. The bit width of the bus refers to the number of binary data bits that can be transmitted simultaneously, or the number of bits in the data bus, such as 32 bits, 64 bits, etc.; the wider the bus bit width, the greater the data transmission rate and bandwidth. The operating clock frequency of the bus is measured in MHz and is related to the transmission medium, signal amplitude, and transmission distance. Under the same hardware conditions, using differential signal transmission often allows for much higher frequencies than single-ended signals, as the amplitude of differential signals is only half that of single-ended signals.
The bandwidth, bit width, and operating frequency of the bus are closely related, and their relationship is as follows:

Reliability of Data Transmission
Reliability is the most critical parameter for evaluating a bus. Without reliability, the transmitted data will be erroneous, thus losing the practical significance of the bus. To enhance the reliability of the bus, the following measures are commonly adopted:
1. Use data frames to listen to the bus before sending. Data can only be transmitted when the bus is detected to be idle, thus avoiding data collisions between different nodes.
2. Use twisted pair differential signals to transmit data, reducing the voltage swing of a single wire and minimizing the high-frequency harmonics generated by signal edges.
3. Ensure that the data edges have a certain slope.
4. Increase matching resistors and capacitors to reduce signal transmission on the bus and balance the distributed capacitance on the bus.
5. Utilize appropriate network topologies and shielding technologies to minimize interference from other signals.
Several Typical Bus Technologies and Their Features
STD System Bus
1. Modular small board structure, open flexible configuration
The STD bus divides the microcomputer system into several modules, each made into standard functional templates (plug-in cards). Users can choose functional templates according to their needs to form their microcomputer. Plug-in cards can connect to peripherals using other methods, allowing for flexible and convenient configurations to meet different requirements.
2. High reliability, strong anti-interference ability, and high signal quality
The excellent physical characteristics of the STD bus enable it to withstand harsh environments. Its modular small size structure enhances its resistance to shock and vibration, while also reducing self-heating issues. The STD bus uses printed circuit board edges as connectors, preventing plug-in cards from being inserted incorrectly and avoiding pin bending or breakage. Additionally, the structure of the STD bus ensures that the signal flows orderly from the bus interface to the user interface, improving signal quality.
3. Compatible structure, supporting products, and comprehensive functions
The compatible structure of the STD bus allows 8-bit STD products to work alongside new standard 16-bit or 32-bit STD products. The STD bus also supports multi-processor systems. With the advancement of technology and the promotion and application of STD products, the functionality of standard plug-in boards continues to enhance, and the supporting products become increasingly rich, providing great convenience for users.
RS-232C Communication Bus
RS-232C is a serial communication bus standard and serves as the interface standard between data terminal equipment (DTE) and data communication equipment (DCE). It was developed in 1969 by the Electronic Industries Alliance (EIA) from the CCITT remote communication standards. The purpose of this standard was to ensure compatibility for plug connections between devices from different manufacturers. As long as a device has an RS-232C standard interface, it can be connected without any conversion circuits, but this standard only guarantees hardware compatibility, not software compatibility.
The RS-232C standard includes mechanical and electrical specifications, where the mechanical specifications dictate that the RS-232C standard interface’s external connector (pins and sockets) is a “D”-type 25-pin plug.
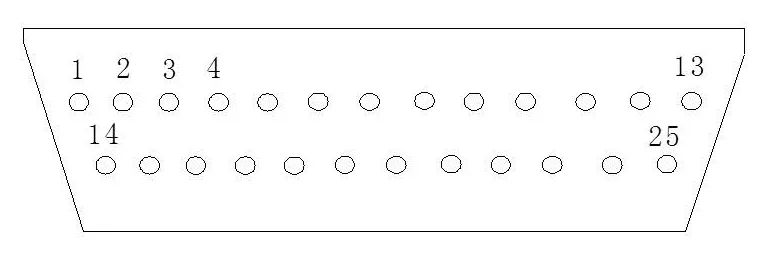
Main Features of RS-232C
1. Fewer signal lines: The RS-232C bus has a total of 25 lines, including both main and auxiliary channels, enabling duplex communication. In practical applications, most only use the main signal channel (the first channel) and only a few signals (usually 3-9 lines).
2. Long transmission distance (relative to parallel): Since RS-232C uses serial transmission and converts TTL levels to RS-232C levels, the transmission distance can reach 30 meters in baseband transmission. If using optical isolation with a 20A current loop, the transmission distance can reach 1000 meters. Of course, if a modem is added to the serial interface for transmission via wired, wireless, or fiber optics, the distance can be even greater.
3. Multiple selectable transmission rates: The standard transmission rates specified by RS-232C include: 50, 75, 110, 150, 300, 600, 1200, 2400, 4800, 9600, 19200 baud rates. It can flexibly be used with devices operating at different rates.
4. Strong anti-interference capability: RS-232C uses negative logic, where idle states are represented by any voltage between +3V and +25V for logic “0”, and any voltage between -3V and -25V for logic “1”. It transmits without returning to zero, greatly enhancing anti-interference capabilities.
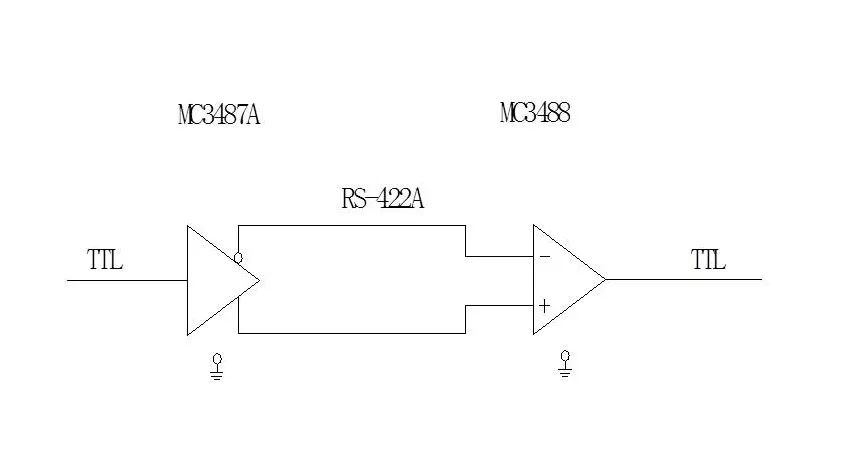
RS-422A Bus
RS-422A uses a balanced output transmitter and differential input receiver. The transmitter has two output lines; when one line jumps to a high level, the other output line jumps to a low level, inverting the voltage polarity between the lines. Sending signals over RS-422A requires two lines, and receiving signals also requires two lines. For duplex communication, at least four lines are needed. Since RS-422A lines are fully balanced, they generally do not use a common ground line. This minimizes interference caused by different ground potential between communication parties. Common-mode interference caused by differing ground potentials is filtered out by the differential receiver, while such interference can cause errors in RS-232C lines.
RS-485 Bus
RS-485 bus uses interface circuits for full-duplex communication, requiring two pairs of lines or four lines, increasing line costs. RS-485 is suitable for communication where both sending and receiving parties share a pair of lines, as well as for network configurations where multiple points share a pair of lines, although communication is half-duplex in this case.
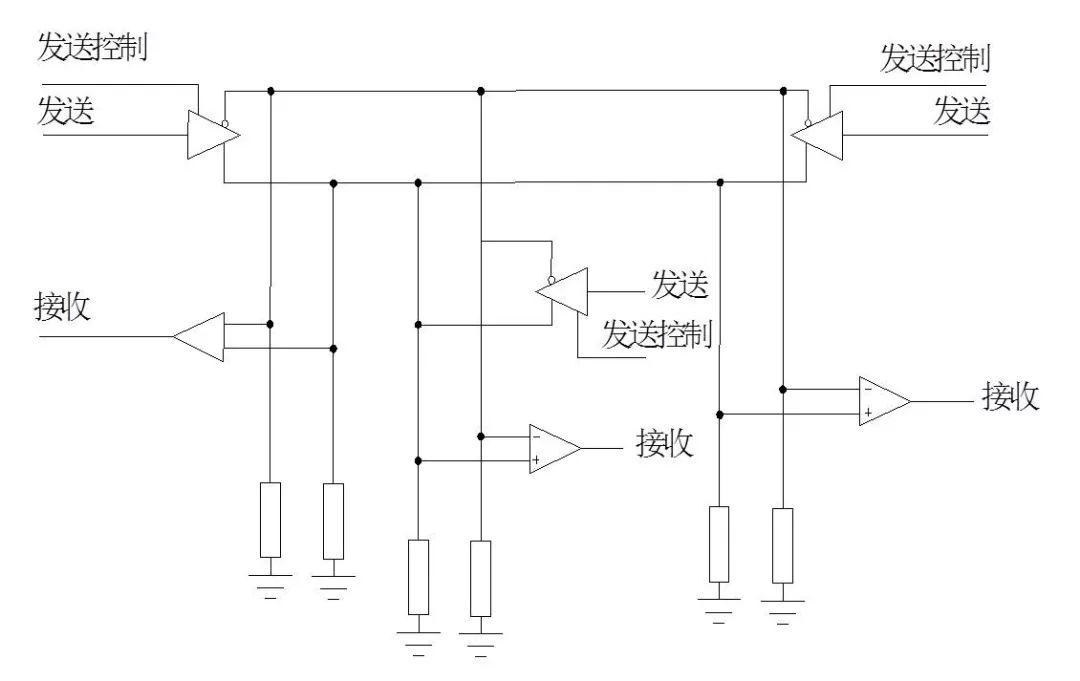
Since a single line is shared, only one transmitter is allowed to send data at any given time, while other transmitters must be in a closed (high-impedance) state. This is controlled by the send enable pin on the transmitter chip. For example, when this pin is high, the transmitter can send data, and when it is low, both output terminals of the transmitter present a high-impedance state, as if they were disconnected from the line.
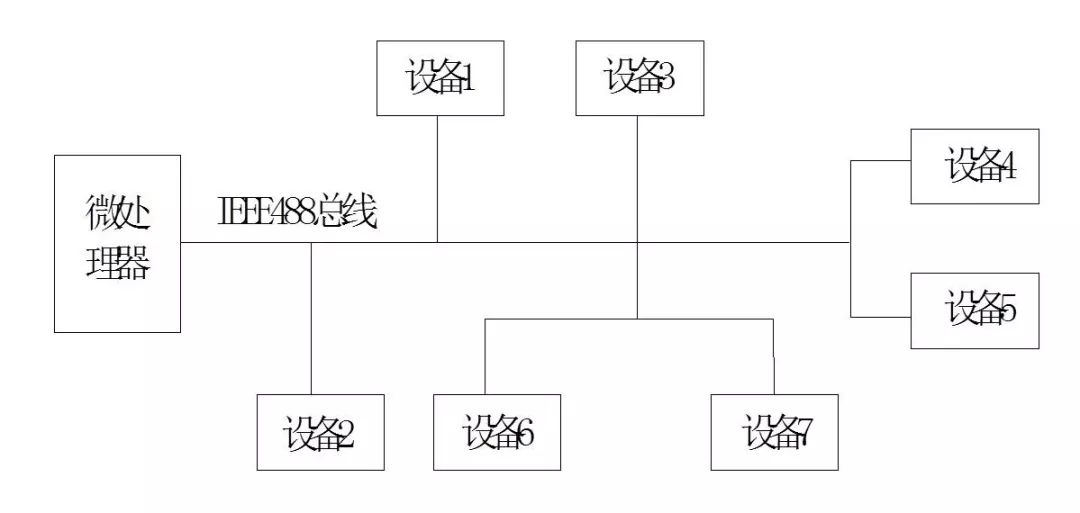
IEEE 488 Bus
IEEE 488 is a parallel external bus developed by HP in the 1970s. In 1975, it was recommended as the IEEE-488 standard bus, and in 1977, it was recognized and recommended by the International Electrotechnical Commission (IEC), being named IEC-IB. Thus, this bus is known by multiple names including IEEE-488, IEC-IB (IEC Interface Bus), HP-IB (HP Interface Bus), or GP-IB (General Purpose Interface Bus). The introduction of the IEEE-488 bus allows for the construction of a computer-controlled testing system without the need for complex control circuits. The IEEE-488 system primarily consists of rack-mounted intelligent instruments, forming an open modular testing system, making it one of the most widely used communication buses in industry today.
Usage agreements for the IEEE-488 bus include: 1. Data transmission rate ≤ 1MB/S. 2. Maximum of 15 devices connected to the bus (including the microcomputer acting as the controller). 3. Maximum distance between devices ≤ 20M. 4. Total cable length of the system ≤ 220M. If the cable length exceeds 220M, timing relationships may change due to delays, leading to unreliable operation. In such cases, a modem should be added. 5. All digital exchanges must be digital. 6. The bus specifies the use of a 24-wire combination plug and employs negative logic, with logic “1” represented by a voltage less than +0.8V and logic “0” represented by a voltage greater than 2V.
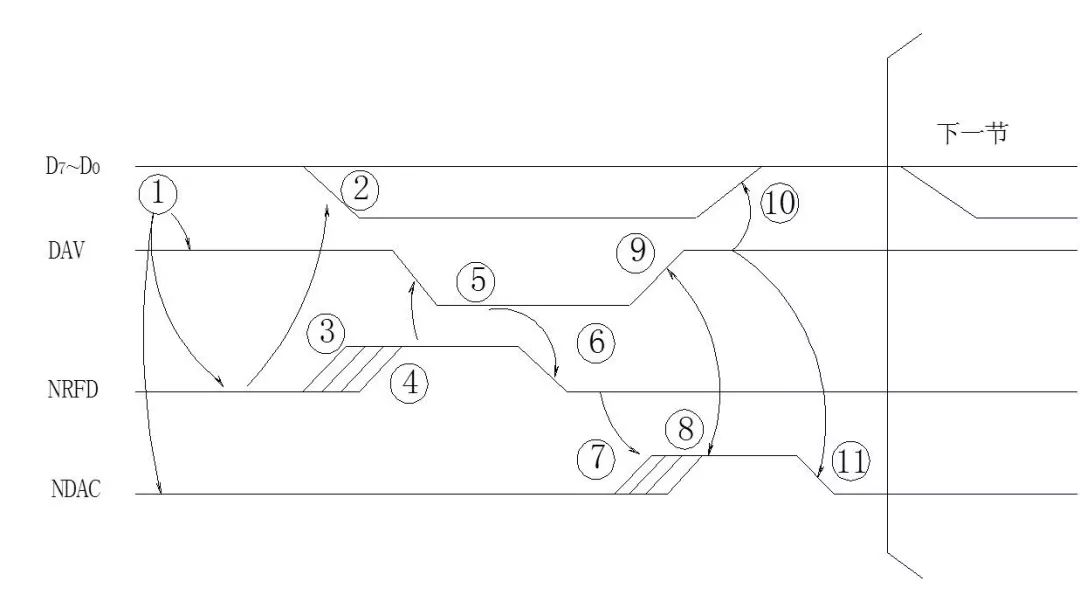
Operational modes of devices on the system: 1. “Listener” mode: This is a receiver that receives data on the data bus. At any given time, there can be more than two “listeners” operating in a system. 2. “Speaker” mode: This is a transmitter; a system can have more than two speakers, but only one speaker can operate at any given time. 3. “Controller” mode: This is a device that issues commands to other devices, such as addressing other devices or allowing the speaker to use the bus. Only one controller can operate at any given time.
Data transmission timing for the IEEE-488 bus: Data transmission on the IEEE-488 bus is asynchronous, meaning that each byte of data transmission requires handshake communication using the DAV, NRFD, and NDAC signal lines.
Source: Sensor Technology WeChat Official Account
