The advancement of medical robots is expected to improve modern medicine and quality of life. The miniaturization of these robotic platforms has led to numerous applications that play a role in precision medicine. Despite the widespread clinical applications of micro and nano robots, their use in precision medicine still faces challenges in technology, regulation, and market acceptance. Nevertheless, the recent shift from proof-of-concept to in vivo studies has demonstrated their potential in precision medicine.
A review article titled “Medical Micro/Nanorobots in Precision Medicine” was published by Professor Fernando Soto’s team from Stanford University in the journal Advanced Science, summarizing the research progress of medical micro and nano robots in treatment, surgery, diagnosis, and medical imaging.
The miniaturization of robotic platforms has the potential to enhance medical treatment and diagnosis for patients. These tiny robotic “surgeons” can reach hard-to-reach areas of the body and perform various medical procedures.
Despite advancements in medical micro/nano robots over the past decade, one of the unmet needs and significant challenges in the field remains the translation of these tools into widespread clinical applications. In this regard, this review aims to illustrate the latest trends in micro/nano robot research, focusing on their applications in transitioning to clinical use in precision medicine.
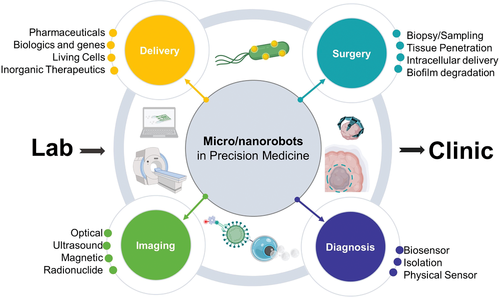
Figure 1: Current Trends in Micro/Nanorobot Research in Precision Medicine
As shown in Figure 1, the application areas of micro/nano robots include treatment, surgery, diagnosis, and medical imaging. Each of these areas aims to address different challenges in medicine. For example, motile micro/nano robots can directly swim into target areas and deliver precise doses of therapeutic payloads. Thus, maintaining therapeutic efficacy while reducing side effects is a common issue when using passive drug delivery methods with low targeting efficacy. On the other hand, using micro/nano robots for surgery may reach body areas that cannot be accessed through catheters or invasive surgeries, allowing for tissue sampling or delivering therapeutic payloads deep into diseased tissues. The use of small robotic surgeons can help reduce invasive surgeries, thereby decreasing patient discomfort and postoperative recovery time.
Next, knowledge related to micro robot manufacturing and engines is introduced. From a manufacturing perspective, motion at the microscopic scale is governed by low Reynolds numbers and Brownian motion; therefore, the main considerations in designing and manufacturing micro/nano robots are to develop engines that can continuously “turn on” and generate sufficient thrust to overcome environmental resistance. Thus, both the design and manufacturing of miniaturized robots are based on the need for active materials that can continuously convert various forms of energy into motion. For example, chemically propelled micro robots require asymmetric distribution of catalytic materials to generate directed motion. Electromagnetic propelled micro motors use magnetic materials to induce rotation of micro-engineered structures. Ultrasound propelled motors employ density-asymmetric structures to generate pressure. For micro/nano engine manufacturing, researchers have also explored methods to create asymmetric coating structures using thin film coatings on templates, while other designs with more complex structures (e.g., micro coils or intricate geometries) have been constructed using advanced techniques, including 3D printing, oblique angle deposition, and roll-to-roll lithography. From the perspective of engines, many studies have drawn inspiration from a variety of mechanisms that nature has already developed to achieve small-scale motion. Many microorganisms have chemical rotors that allow them to power their flagella or cilia, driving them in a spiral or bead-like motion, thus enabling their movement. This propulsion mechanism has been a source of inspiration for the synthesis of rotating micro robots. As shown in Figure 2, artificial helical microstructures, flexible filaments, or rotating pins rotate along the axis of bacterial flagella. Each individual micro robot is energy-independent from other micro robots, rather than being pulled in a designated direction by a magnetic field.
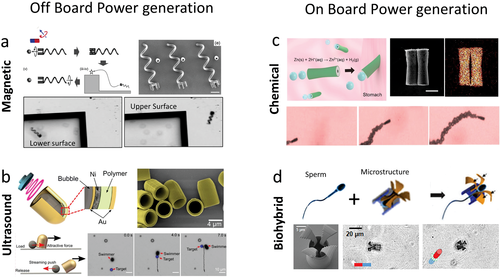
Figure 2: Power Mechanism of Micro/Nano Robots
Targeted Delivery Using Micro/Nano Robots is also discussed in this article. Directing micro/nano robots to diseased tissues can serve as a dynamic platform for delivering drugs, and when the micro robots reach a specific location, the release of therapeutic payloads can be triggered to improve drug targeting. Drugs mainly consist of small synthetic chemicals used for treating and preventing diseases. Regardless of the method of administration, the pharmacokinetic properties of drug formulations are often poor, such as short half-lives, limited biodistribution, and rapid clearance from the body, which often undermines the efficacy of the drug formulations. Therefore, high-dose repeated administration is inevitable to induce the desired therapeutic effect, which may lead to increased toxicity and side effects. In this regard, micro/nano robots have the potential to overcome this challenge by providing precise dosing in target areas rather than relying on high-dose systemic release. By utilizing electrostatic interactions, drugs can also be directly captured on the surfaces of micro/nano robots. It has been reported that the electrostatic force is used to load positively charged bright green antibacterial drugs onto the negatively charged polypyrrole-polystyrene sulfonate segments of ultrasound-propelled nano robots. The electrostatic interaction is stable at pH 7. On the other hand, when the environmental pH becomes relatively acidic (pH 4), the polypyrrole-polystyrene material segments become protonated, triggering the release of the loaded bright green drug molecules. In another instance, reduced graphene oxide/platinum micro rockets were used to transport doxorubicin. Reduced graphene oxide can load drugs via π-π interactions. This method proposes a unique triggered release mechanism based on electrochemical stimulation that disrupts the interaction between doxorubicin and the graphene surface of micro/nano motors. Furthermore, using a bismuth coating to load therapeutic payloads further extends the use of electrochemical stimulation as a release mechanism. The porous surfaces of ultrasound-propelled nanowires are functionalized with anionic coatings that allow doxorubicin to be electrostatically loaded onto the micro/nano robot structures. The porous sections are responsible for increasing the drug loading capacity and promoting release via the photothermal effect of near-infrared radiation.
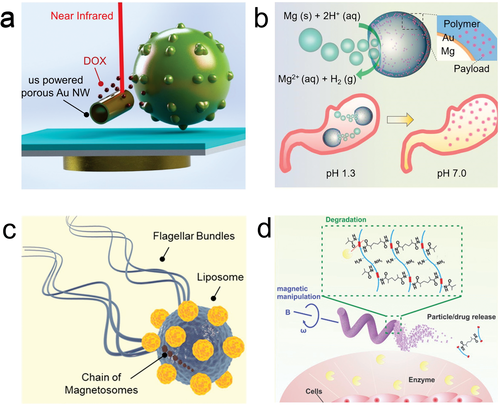
Figure 3: Targeted Delivery Based on Micro/Nano Robots
Micro/nano robots can be used not only for drug delivery but also for delivering biological components. For example, proteins, tissue plasminogen activators for thrombolysis, viral vaccines, or antibodies. Unlike synthetic drugs, biological agents are therapeutic agents typically produced by living systems, including small fragments of proteins or biological components. Using electric rotor nano robots can deliver tumor necrosis factor. Gold nanowires can be functionalized with 1-dodecanethiol to absorb tumor necrosis factor on the surface of the nano robots. This work demonstrates that a single nano robot can carry and deliver a threshold amount of tumor necrosis factor to stimulate the activation of the classical nuclear factor-κB transcription factor within a single cell, thereby mimicking the signaling of immune chain reactions. In another study, ultrasound-propelled nanowires released insulin using pH-responsive glucose oxidase/phenylboronic acid supramolecular nanovalves. This method exhibits gated responsive release, as insulin is only released in the presence of glucose. Glucose oxidase catalyzes glucose into gluconic acid, thereby lowering the local pH and inducing the protonation of phenylboronic acid groups in the insulin-loaded reservoir located in the silicone segment. In animal models of pigs and mice, chemically propelled micro robots were used to deliver thrombin (coagulant) from upstream blood vessels to achieve hemostasis. The engines of micro/nano robots utilize the chemical degradation of carbonate and tranexamic acid to generate bubbles as a propulsion source. (Figure 4)
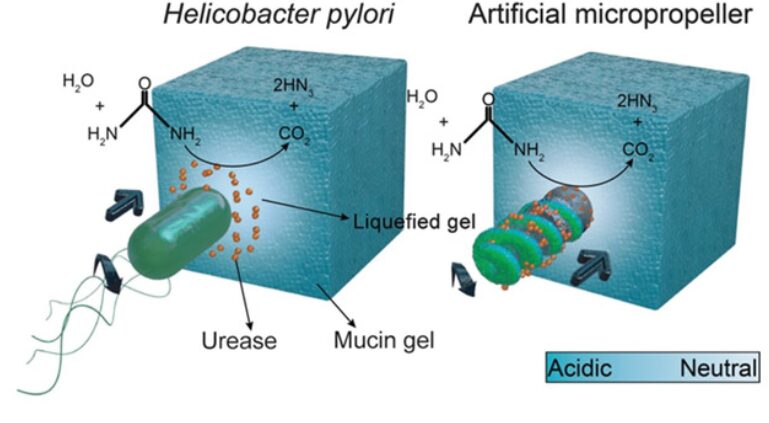
Figure 4: Delivery of Biological Agents Based on Micro/Nano Robots
The latest developments using micro/nano robots as cell carriers provide unique opportunities for regenerative medicine. The ability to deliver cells directly to target tissues or stem cell niches can improve their retention and survival rates. Additionally, it can help address some significant challenges in regenerative cell transplantation. With their large payload capacity, micro/nano robots can be engineered with various types of cells that have different biological properties. One strategy is to use the surfaces of these micro robots as scaffolds for cell culture, providing mechanical support for cells to grow on moving structures. Micro robots loaded with stem cells can move along predetermined trajectories under external rotating magnetic fields (Figure 5).
Figure 5: Using Micro Robots as Cell Transport Scaffolds
Micro robots have also been used to transport single cells without serving as scaffolds, instead transporting through chemical interactions or physical stimuli. Different types of blood cells have been combined with motile robots to leverage their biological functions. For example, magnesium-based biohybrid micro motor systems have been integrated with living macrophages (Figure 6a). This system combines the biocompatible propulsion of the magnesium core engine of the micro robot with the biological functions of the microphage, resulting in an endotoxin neutralization effect. E. coli biohybrid micro robots have been used to transport live red blood cells (RBCs) through biotin-avidin-biotin functionalization (Figure 6b). Since both parts of the biohybrid robot are “soft,” they can maintain interactions after passing through microfluidic channels smaller than their size. In this case, red blood cells are used as carriers, although they could potentially be used as sponges to capture toxins in blood samples. There have been proposals to use magnetically driven micro robots as carriers for sperm. The micro robots consist of helical structures that can capture and transport sperm cells within their hollow interiors (Figure 6c).
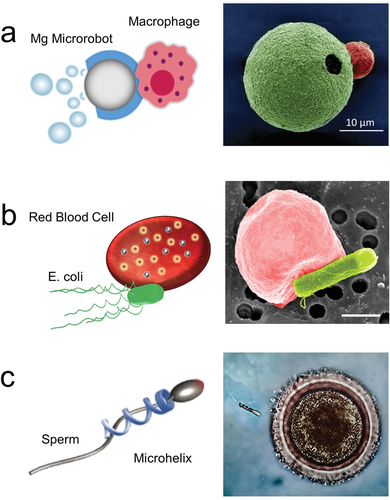
Figure 6: Micro Robots as Carriers for Single Cells
Micro/Nano Robots in Surgical Procedures Large surgical tools lack comparable micro/nano-scale counterparts, hindering the ability to operate at such small scales and resulting in minimal tissue penetration. The miniaturization of surgical tools can provide significant advantages due to their smaller sizes and ability to access places unreachable by catheters and blades. Micro/nano particles can serve as surgical tools designed to penetrate or retrieve cellular tissues directly. These unconstrained minimally invasive systems will provide access to body areas that large robotic technicians cannot reach. Moreover, they have the potential to reduce the risk of infection and recovery time. Micro/nano robots can collect tissue samples and bacteria to minimize tissue damage by reducing invasive surgeries and facilitating diagnosis. The further miniaturization of these devices will allow for sampling of even smaller areas. For example, star-shaped grippers that can respond to various environmental stimuli to close and capture tissues (Figure 8).
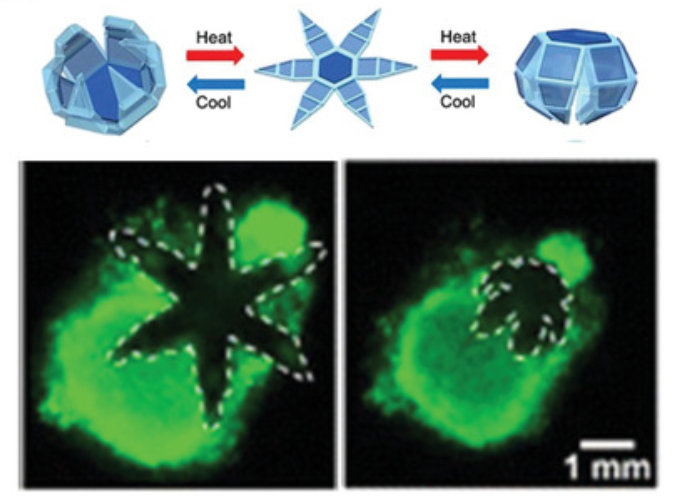
Figure 8: Tissue Sampling Based on Micro Robots
Robotic systems are effective tools for accessing deep tissue areas that cannot be reached through vascular absorption. For instance, robotic devices in the centimeter range have been widely used for gastrointestinal assisted delivery, where robots are used to penetrate tissues or collect samples. Rotating micro robot drills powered by external rotating magnetic fields have demonstrated the ability to penetrate deep into various organs. Their applicability in surgical procedures has been demonstrated using pointed tubular micro drills (Figure 9).
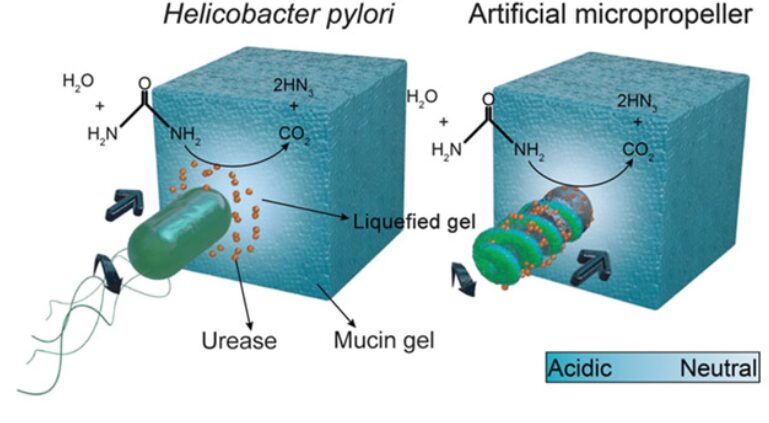
Figure 9: Micro/Nano Robots for Tissue Penetration
Recent studies have focused on miniaturizing surgical robot platforms at the single-cell level. Ultrasonically driven micro robots have demonstrated the ability to internalize and propel within single living cells. This capability has been utilized to deliver genetic material within cells. The use of magnetically driven micro motors has been applied to introduce a higher degree of control within cells, with the potential for subcellular surgery.
Biofilms and bacterial infections pose challenges for treatment as different pathogens spread and settle in various areas of the body, leading to many diseases. Moreover, biofilms are often resistant to antimicrobial drugs, indicating a need for physical methods to treat diseases. In this regard, different micro/nano platforms have been adopted to mechanically disperse bacterial pathogens. Magnetic rotating nanowires have been utilized to mechanically disrupt Aspergillus biofilms. The combined use of rotating nano robots with antibacterial agents has enhanced bacterial killing effects. Additionally, urea-driven micro/nano robots have been used for selective targeting, penetration, and treatment of bladder cancer. Micro/nano robots contain anti-FGFR3 antibodies that can selectively bind to the outer surface of 3D cancer spheroids (Figure 10).

Figure 10: Degradation of Biofilms by Micro/Nano Robots
Micro/Nano Robots in Diagnostics Motile micro/nano robots provide unique opportunities for diagnostics, where micro robots induce target receptor interactions and increase fluid mixing. Selective recognition agents for target molecules, including nucleic acid materials, proteins, cells, and genetic materials, can be utilized for analysis and are part of the diagnostics and detection of different biological targets in complex and heterogeneous environments. Micro/nano robots have demonstrated the ability to detect various biological targets based on motion or fluorescence quenching changes. For example, the Sanchez group reported triple DNA pH-sensitive nanowires labeled with Förster resonance energy transfer (FRET) for pH monitoring of microenvironments (Figure 11a). Additionally, micro robots functionalized with oligonucleotide probes have been used to detect complementary nucleic acid strands of target DNA or RNA (Figure 11b). Nano robots associated with HIV-1 loop-mediated isothermal amplification trigger the presence of HIV-1 RNA strands in solution, resulting in the formation of large stem-loop amplicons that reduce the speed of the nano robots. This change in acceleration is measured using a 3D printed microscope system mounted on a smartphone. This portable platform can detect HIV-1 virus in patient samples, showing good sensitivity and specificity (Figure 11c). Figure 11d demonstrates the mechanism of micro/nano robots detecting Zika virus based on motion immunoassays. This robotic sensor uses nano robots coated with anti-Zika mAb and beads coated with anti-Zika mAb, and the interaction between these components leads to the movement of the beads. This motion-based strategy exhibits high specificity in the presence of other viruses.
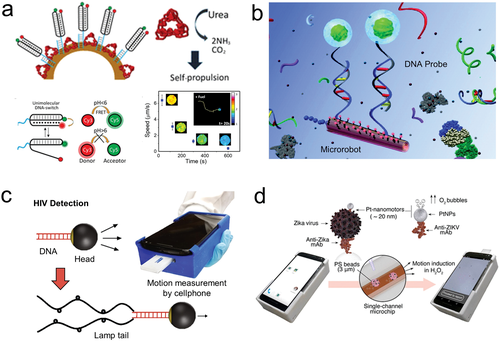
Figure 11: Micro/Nano Robots for Biosensing
Current technologies for isolating and purifying biological targets require long incubation times and multiple washing steps. Functionalized micro/nano robots have been described as “real-time” platforms for rapid separation of biological targets and infectious pathogens. For example, nano robots functionalized with biological receptors, such as concanavalin A (conA), have been used as tools for real-time separation of E. coli (Figure 12).
Figure 12: Micro/Nano Robots for Isolation and Purification of Biological Targets
Micro/nano robots have the potential to serve as label-free biomechanical probes. For instance, helical nano robots driven by rotating magnetic fields have been used to probe the mechanical properties inside living cells (Figure 13a). This nano motor faces challenges of low adhesion to the surrounding environment inside cells, which in some cases may lead to reduced mechanical responses. However, after incubation and internalization, the motion of helical magnetic nano robots has been successfully explored in renal and endothelial cell environments. Viscosity is an important parameter for medical applications. However, measuring their rheological properties is challenging due to the mixture of various biological components in biological fluids. Rotating nano robot coils have also been studied as mechanical sensors to determine the rheological properties of microscopic volumes (Figure 13b). Due to the lack of physical probes that can interact with phagocytic cells in a pathogen-like manner, studying the hunting behavior of microphages and immune host defenses in microenvironments poses challenges. In this regard, five magnetic micro robots have been studied for their degrees of freedom to mimic the predator-prey interactions in macroscopic organisms, hunting and phagocytosing cells, particularly in the immune host defense in microenvironments (Figure 13c).
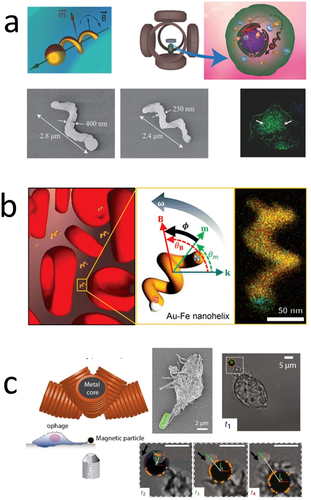
Figure 13: Micro/Nano Robots as Mechanical Probes
Micro/Nano Robots in Medical Imaging The transition from in vitro studies to in vivo studies has addressed the need to integrate micro robots with medical imaging platforms. Diagnosing diseases remains a challenge for clinicians and researchers, as the majority of cases remain asymptomatic until late stages due to a lack of sensitivity and specificity in accurately detecting malignant precursors. In this context, micro/nano robots can enhance current imaging capabilities. Initial work with micro/nano robots adopted optical methods, including catheter cameras and optical radiation, which provide powerful imaging capabilities at relatively low costs. Figure 14a shows the use of charge-coupled device cameras to monitor organic molecules or inorganic fluorescent nanoparticles in vivo, capturing the light emitted from the animal’s body. The fluorescence signals are further overlaid on actual images of the animals, allowing for spatial localization of molecular imaging agents. Therefore, by modifying the surfaces of micro robots with fluorescent molecular imaging agents, the widespread application of micro robot imaging in vivo can be easily achieved.

Figure 14: Micro Robots for Medical Imaging
Ultrasound imaging is another candidate that provides a high-cost-effective alternative with high biocompatibility, enabling real-time visualization of micro/nano robots. The interaction of ultrasound pulses with tissues of different reflective properties generates unique echoes that are recorded and converted into images. Magnetic imaging is one of the most powerful methods for imaging micro/nano structures in vivo. Magnetic resonance imaging (MRI) utilizes magnetic fields to visualize biological tissues with high spatial resolution and contrast. The imaging mechanism is based on the absorption and re-emission of electromagnetic radiation or hydrogen nuclei in the presence of strong magnetic fields. In recent years, MRI imaging has been applied to visualize magnetic structures inside small mammals. Recent work has used magnetic helical micro swimmers made from spirulina microalgae, coated with superparamagnetic magnetite (Fe3O4) nanoparticles. In this case, the magnetic coating can serve as an engine to convert external magnetic fields into motion and serve as imaging contrast without any additional surface modifications. In vivo experiments with these robots demonstrated the ability to track these microstructures within the stomachs of mice (Figure 15). Radioactive nuclide imaging technology is also another powerful tool in medical imaging. They possess molecular information and sensitivity, thus providing unique advantages. Positron emission tomography (PET) is based on the emission of positrons that can decay radioactive nuclides, generating gamma rays that can be detected by scanners to map the area of study. Different nuclides can be employed to target specific organs or biological processes.
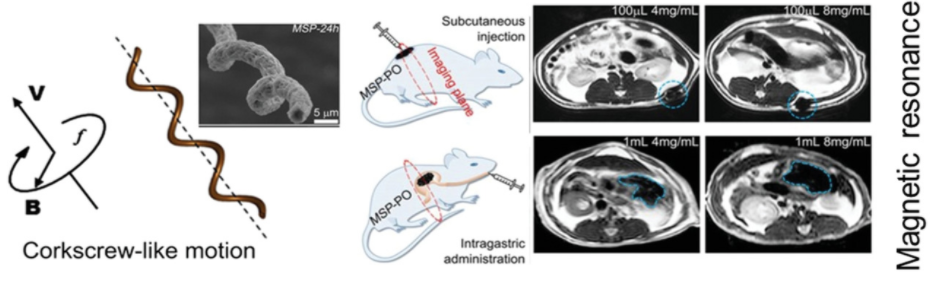
Figure 15: Application of Micro/Nano Robots in MRI Imaging
The use of micro/nano robots in precision medicine has diverse applications across various fields, including the delivery of drugs, biological agents, genes, and living cells; surgical tools for biopsies, tissue penetration, intracellular delivery, or biofilm degradation; and diagnostic tools, including physical and chemical biosensors or isolation tools, as well as optical, ultrasound, magnetic, and radioactive nuclide imaging tools.
— Scan the QR code to read the original English text —

Paper link:
https://onlinelibrary.wiley.com/doi/pdf/10.1002/advs.202002203

-
Submission Guidelines for the Intersection of Medicine and Engineering V1.0
-
Review Collection: Progress of Hyaluronic Acid in Tissue Engineering Applications
-
Biomaterials: GelMA/HAMA Dual Component Hydrogel Loaded with Adipose Stem Cells Promotes Skin Wound Vascularization
-
Photocurable GelMA Hydrogel (EFL-GM Series)
-
Photocurable Hyaluronic Acid Hydrogel (EFL-HAMA Series)
-
High-precision 3D Printing of Hydrogel Biomaterials Customized
-
High-precision 3D Printing of Polymer Biomaterials Customized
-
Photocurable Biological 3D Printing Printability Evaluation Standards and Printing Process Models
-
Lightweight 3D Cell Culture Scheme Based on Photocurable Hydrogel
-
EFL Third Generation Multifunctional Extrusion-type Biological 3D Printer Coming Soon!

Tap “Read” to share