Introduction
Application Practice
AI robot courses have certain advantages in cultivating innovative talents. In AI robot courses, students will develop problem awareness and innovative thinking through hands-on practice, which is of great significance to carry out robot education. However, robot education in domestic elementary and secondary schools still mainly orients itself to winning competitions and awards. Besides, the teaching of robot courses lacks a complete and unified curriculum system. Meanwhile, the teaching method of robot courses emphasizes imitation, rather than application. Therefore, the robot curriculum of primary and secondary schools in China urgently needs to be reformed. Based on the experiential learning theory, this paper has applied to the curriculum in elementary and secondary schools the teaching mode of “experiencing context-reflect and observation-summary and internalization-Innovation and sharing” for practical exploration. According to the results, this teaching mode can effectively arouse students’ interest in the curriculum, and cultivate their innovative thinking, which guarantees it a reference for teachers who are about to carry out robot courses.
Keywords: AI robot course; Experiential learning; Teaching mode; Teaching activity design
Classification Number: G434 Document Code: A Article Number: 1673-8454 (2022) 10-00123-06
Author Introduction:
Yuan Jiaxin, a master’s student, majoring in artificial intelligence education and educational big data, email: [email protected];
Kong Xinmei, a master’s student, majoring in artificial intelligence education and educational big data, email: [email protected];
Du Dongyan, a master’s student, majoring in artificial intelligence education and educational big data, email: [email protected];
Fang Haiguang, professor, PhD, corresponding author, majoring in educational big data, artificial intelligence education, intelligent educational robots, smart education, etc., email: [email protected].
1. Problem Statement
In recent years, the national emphasis on innovative talents has been increasing. In 2010, the Central Committee of the Communist Party of China and the State Council clearly proposed the main tasks of talent team construction in the “National Medium- and Long-term Talent Development Plan (2010-2020)” to focus on cultivating innovative talents.[1] In 2016, the “National Innovation-Driven Development Strategy Outline” issued by the Central Committee of the Communist Party of China and the State Council proposed that technological innovation is a strategic support for enhancing the country’s comprehensive strength, and must be placed at the core of national strategic development. It is necessary to continuously promote innovative educational methods, improve the teaching model for talent cultivation, enhance students’ information awareness, and cultivate students’ innovative thinking, creativity, and social responsibility. Robot teaching is one of the important ways to cultivate innovative talents in China.[2] Research by foreign scholars shows that robot education can stimulate students’ curiosity and creativity,[3] arouse children’s interest in science and technology, and enhance their problem-solving ability, as well as cultivate their cooperation and communication skills.[4] Therefore, carrying out robot education can meet the needs of the country for innovative talents.
Research on robot education abroad began earlier, especially in countries like the United States, the United Kingdom, and Japan. It is generally believed that educational robots originated from the Artificial Intelligence Laboratory at MIT. [5] In 1994, MIT opened a robot course to improve the design ability and creativity of engineering design students.[6] In terms of teaching methods, there are no unified curriculum standards for robot courses in primary and secondary schools in the United States.[7] The methods used abroad are project-based teaching and experimental methods, especially project-based teaching, which many educators believe is suitable for robot courses.[8] Japan has established specialized disciplines for the study of robots in universities, making programming a compulsory subject in middle schools, and continuously introducing robot competitions in elementary and secondary school education.[9] It can be seen that robot education has been popularized in colleges and primary and secondary schools.
Research on robot education in China began in the 1970s and 1980s.[10] In 2000, robot teaching was introduced into information technology courses domestically.[11] The “General High School Technology Curriculum Standards (Experimental)” issued by the Ministry of Education in 2003 revised and supplemented the information technology curriculum, incorporating basic knowledge of AI and knowledge related to robot production into information technology and general technology courses.[12] In 2017, the “New Generation Artificial Intelligence Development Plan” issued by the Central Committee of the Communist Party of China and the State Council emphasized the need to gradually implement AI education for all, and in the elementary and secondary stages, not only to establish AI-related courses but also to popularize programming education to cultivate innovative talents.[13] With the support of the state, robot education courses have gradually entered the curriculum of elementary and secondary schools in China.
As of now, robot education has entered elementary and secondary schools in China for 20 years. However, domestic robot education in primary and secondary schools still starts from competitions or cultivating interests, lacking a complete and unified curriculum system. The teaching methods in robot courses mostly involve students imitating teachers’ operations, neglecting students’ active application.[14] Although robot courses have received national recognition and attention, many problems still arise during their development, indicating that robot courses in China need reform. To change the discipline-centered teaching status of robot education, this paper draws on David Kolb’s experiential learning theory, striving to adopt the teaching mode of “experiencing context-reflect and observation-summary and internalization-innovation and sharing” to achieve innovation and breakthroughs in robot courses.
2. Teaching Mode Design
In traditional classrooms, teachers always convey knowledge to students in a way of indoctrination. However, students who do not have personal experience cannot understand the deeper meaning behind the knowledge, so having experience is very important. The main characteristics that elementary and secondary school intelligent robot courses should possess are innovation, comprehensiveness, openness, development, practicality, and inquiry. David Kolb proposed that experiential learning is “seeing learning as a process of transforming experiences and creating knowledge.” First, learning is not a result, but a process. Second, learners achieve the unity of perception and comprehension through experience, thus achieving true learning. Finally, knowledge is created in the process of experiential learning.[15] Based on this, this study applies the experiential teaching model to the course and designs a set of teaching mode for AI robot courses, aiming to enhance students’ innovative abilities, as shown in Figure 1.
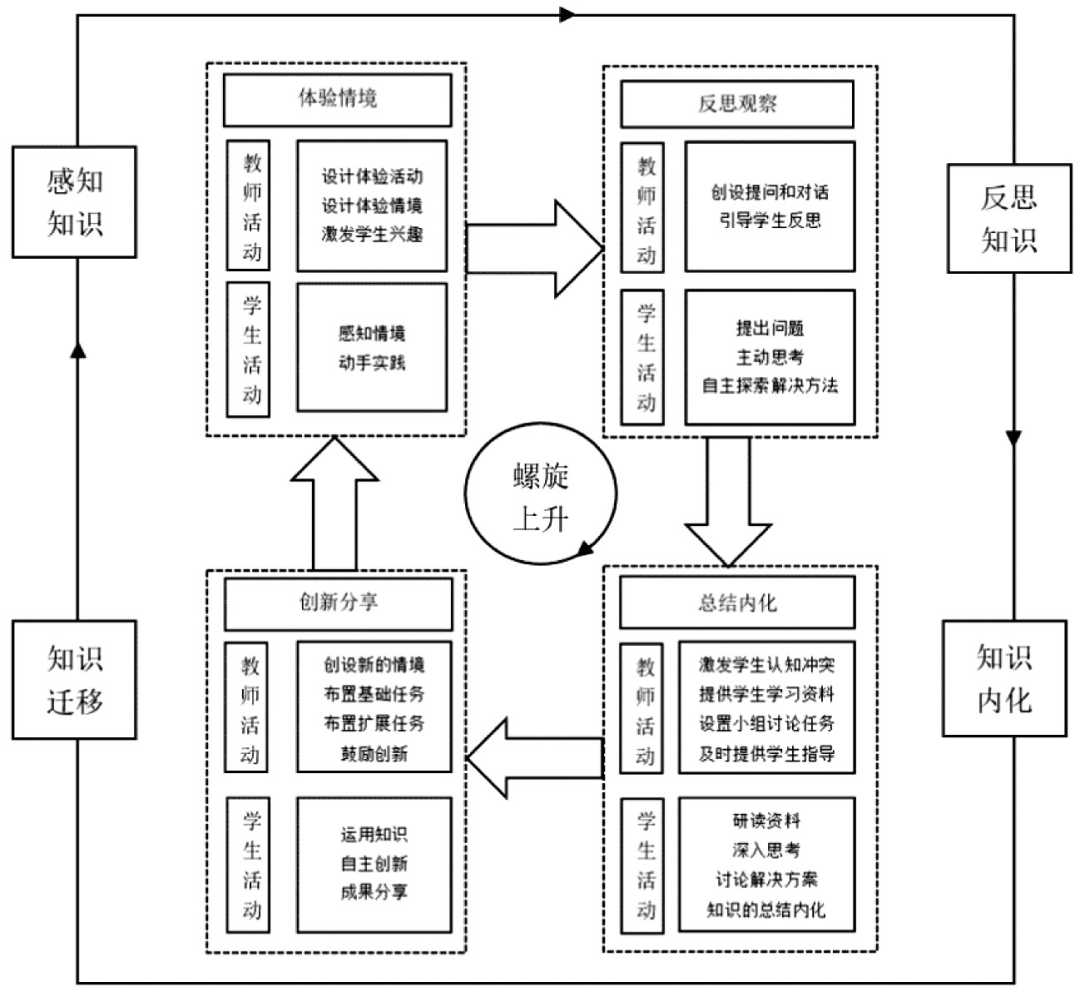
Figure 1 Design of Robot Course Teaching Process Based on the “Experiential Learning Model”
(1) Experiencing Context
Experiencing context allows students to perceive the real environment, thus stimulating students’ interest and motivating them to spontaneously participate in experiential activities. The specific experience is the starting phase of the robot course and serves as the foundation for reflection, summarization, and verification. In this phase, the teacher’s main task is to set up experiential activities and contexts, fully engaging students’ eyes, ears, mouths, noses, hands, and other senses to immerse them in the context. At the same time, teachers should note that the design of the context should point to the teaching objectives, rather than treating the teaching content with a game-like attitude.
(2) Reflect and Observe
Reflection is based on students’ experiential context, enhancing their ability to think and solve problems, and establishing a tendency to transform experience into systematic knowledge. In this phase, teachers should not directly present knowledge points to students but act as “guides” to lead students in reflection through questions and dialogues, cultivating their awareness of actively thinking about problems and stimulating their exploration of solutions.
(3) Summary and Internalization
Summary and internalization involve students conceptualizing knowledge. Only by internalizing and summarizing knowledge can students verify whether they have truly mastered it. In the experiencing context and reflection phases, the knowledge students grasp is fragmented and may even be incorrect. Summary and internalization are processes of integrating fragmented knowledge and timely correcting misconceptions. In this phase, the teacher’s main task is to stimulate students to generate conflicts between their existing and original concepts, overturn their erroneous understandings, and form scientific concepts. First, teachers should allow students enough time to think, which helps students understand knowledge points. Second, teachers need to provide learning materials and organize group discussions. When students encounter unsolvable problems, teachers should actively assist them and promptly correct their misconceptions. Through judgment, reflection, questioning, and cognitive conflicts, students’ abilities to internalize and transfer knowledge will be greatly enhanced.
(4) Innovation and Sharing
Innovation is applying the knowledge summarized and internalized in other contexts, testing the correctness of conclusions in new situations, achieving analogical reasoning, and innovating based on existing experiences to generate new experiences. It is not merely reproducing and extracting knowledge, but more about practice, application, and innovation. In this phase, the teacher’s main task is to create a context related to the learned knowledge, enabling students not only to learn classroom knowledge but also to apply it. Similarly, teachers should change the traditional practice problems and quizzes used to evaluate students, instead setting challenging extension tasks for students and encouraging them to innovate based on existing knowledge.
It is important to note that when teachers apply the experiential learning model as a teaching guide, they must not rigidly adhere to the four stages. The experiential learning model is a nonlinear learning process, and students can enter from any point in the “experiential learning cycle.” Teachers should tailor their teaching according to students’ differences. When students find it difficult to abstract and summarize, teachers can generate another experiential context to prompt them to reflect and summarize; if students already have relevant experiences, teachers can directly enter the reflection and summarization phases to avoid wasting time. At the same time, students can repeat experiential learning multiple times on the same issue until the problem is solved.[16] In summary, the ultimate goal for teachers is to help students master knowledge and cultivate their awareness of problems, thinking patterns, and innovative abilities.
3. Case Applications
(1) Micro:bit Smart Car
1. Teaching Content
The teaching content of this lesson is: mastering the use of infrared remote control and the principle of smart cars receiving remote signals, skillfully assembling smart cars, and using the Micro:bit graphical programming platform to write block scripts to control the robot car to move forward, backward, turn left, turn right, and stop.
2. Teaching Implementation Process
In the experiencing context phase, the teacher arouses students’ curiosity through a smart car competition and allows time for students to experience it personally. During the experience, students grasp the basic operations of the smart car, enhancing their learning interest and inclination to acquire knowledge. In the reflection and observation phase, teachers distribute open-source kits, provide the Micro:bit graphical programming platform, and assign basic tasks. Students observe the structure of the car, think about the process of assembling the car, and outline the key points of programming. In the summary and internalization phase, teachers distribute learning resources, guide students to explore autonomously, and correct existing misconceptions. Students work collaboratively in groups to assemble the car, write code, and achieve the movement of the smart car while completing time trial challenges. In the innovation and sharing phase, teachers encourage students to innovate based on their existing knowledge by modifying block scripts to enable the remote control to perform more functions. Students enhance their knowledge transfer ability through showcasing their works and sharing experiences. Finally, each group evaluates each other based on the aesthetics of the work, completion speed, track time, and innovation.
(2) Micro:bit Robotic Arm
1. Teaching Content
The teaching content of this lesson is: understanding the principle of ultrasonic sensors, mastering the command blocks related to ultrasonic sensors, and being proficient in designing flowcharts. In logical statement settings, students should be able to skillfully use Boolean command blocks. Students should also be proficient in assembling robotic arms and able to import mobile control programs into Micro:bit to achieve distance-grabbing operations.
2. Teaching Implementation Process
In the experiencing context phase, teachers introduce a competition for moving objects and play a video themed “Robotic Arms in the Logistics Field,” allowing students to operate the Micro:bit robotic arm to grasp items. During the experience, students master the basic operations of the robotic arm, laying the groundwork for reflecting on knowledge. In the reflection and observation phase, teachers distribute robot kits and mobile phones with the Wonderbit software installed to each group of students, provide the Micro:bit graphical programming platform, and assign tasks. Students observe the hardware modules, think about the main functions of the ultrasonic sensor, and explore the assembly methods and programming key points for the robotic arm. In the summary and internalization phase, teachers distribute learning resources to stimulate students’ autonomous exploration, assign tasks, and guide students to integrate new knowledge with old knowledge to generate new knowledge. Students collaboratively assemble the robotic arm, program it using the Micro:bit graphical programming platform, and complete the task of distance grabbing with the robotic arm while challenging time-grabbing tasks. In the innovation and sharing phase, teachers encourage students to think divergently and innovate by modifying block scripts to make the robotic arm more flexible and time-efficient. Students enhance their knowledge transfer ability through iterative improvements of the program. Finally, everyone shares their feelings. Through the completion of the works, students gain a lot, experiencing not only the joy of programming but also the tremendous convenience that robots bring to our lives.
(3) Lego EV3 Robot
1. Teaching Content
The teaching content of this lesson is: understanding the working principle of color-sorting robots and mastering the command blocks related to the sorting device; proficiently assembling color-sorting robots, and writing block scripts in the EV3 Classroom graphical programming platform to control the color-sorting robot to sort color modules.
2. Teaching Implementation Process
In the experiencing context phase, teachers introduce the analysis of the “working scene of parcel sorting robots” into the classroom, triggering students’ thinking, and play a video of the working process of color-sorting robots, allowing students to experience its workflow. During the experience, students grasp the basic operations of the color-sorting robot. In the reflection and observation phase, teachers distribute Lego open-source kits to each group of students, provide the EV3 Classroom graphical programming software, and assign tasks to cultivate students’ problem awareness. Students observe and think about the main functions of the color-sorting robot, establishing a mind map in their brains. In the summary and internalization phase, teachers distribute learning resources and guide students to explore autonomously. Students summarize the assembly steps of the robot through collaborative learning, assemble the color-sorting robot, and program it to complete the task of sorting colors, while also participating in a timed sorting challenge. In the innovation and sharing phase, teachers encourage students to think divergently, be bold in innovation, modify block scripts, and retrofit robot kits to enable Lego robots to achieve other functions. Through program improvements, some students create robotic dogs, robot coaches, and robotic arms. Finally, some students voluntarily take the stage to share their feelings. After the class, students suggest that teachers provide preview materials in advance.
4. Application Effect Analysis
To investigate students’ learning situations, based on students’ classroom performance, learning effects, teacher interviews, and analysis of survey questionnaires, the following conclusions are drawn:
(1) Improvement of Students’ Learning Enthusiasm
Through teachers’ observations in class, students actively participate in group cooperation tasks, willingly discuss with group members, and are eager to share their works in front of the class. Moreover, after the course ends, they still feel unsatisfied and want to know the content of the next lesson in advance, indicating a significant increase in students’ enthusiasm. In addition, in the survey regarding students’ classroom experiences, the proportion of students who feel highly interested and happy in class increased from 72.73% in the first lesson to 100% in the last lesson. From this data, it can be concluded that the experiential learning robot course teaching model can effectively enhance students’ learning enthusiasm.
(2) Improvement of Students’ Learning Interest
Survey results show that 72.73% of students were completely uninterested in robots before the robot course. However, after taking the course, 90% of students expressed great interest in learning about robots, believing that the teaching activities designed in class significantly enhance their cooperation and communication skills, and they enjoy this teaching style and pace. This indicates that the robot teaching model based on experiential learning can effectively improve students’ learning interest.
(3) Improvement of Students’ Practical Ability
Through teachers’ observations in class, in the first lesson, many students completed their works slowly, managing to finish only one piece. However, by the last lesson, most students could complete 2-3 works, significantly increasing their speed. This shows that the robot teaching model based on experiential learning has improved students’ practical abilities.
(4) Improvement of Students’ Innovative Abilities
Through teachers’ observations in class, many students share their creative ideas within their groups after completing classroom tasks. Furthermore, through the grading of assignments by teachers, it was found that 80% of students could integrate other ideas into their works and could achieve analogical reasoning, rather than merely copying the content from class. This indicates that the robot teaching model based on the “experiential learning cycle” has enhanced students’ innovative abilities.
5. Discussion
The experiential learning-based teaching model allows students to achieve the unity of perception and comprehension through experience, thus completing meaningful learning. In the experiencing context phase, students participate in experiential activities and gain initial knowledge perception, thus generating learning interest; in the reflection and observation phase, students discover problems through active thinking, leading to a tendency to want to solve problems; in the summary and internalization phase, students deepen their thinking, overturn erroneous understandings, and generate new knowledge; in the innovation and sharing phase, students actively apply knowledge, innovate, and achieve knowledge transfer. Therefore, compared to traditional robot classrooms, the experiential learning-based teaching classroom can accelerate students’ internalization, transfer, and application of knowledge, rather than learning knowledge through rote memorization. At the same time, the experiential learning-based teaching classroom also poses new requirements for teachers.
First, teachers must learn to create contexts. In experiential learning, to stimulate students’ learning interest, it is essential to provide them with real experiences, so the design of experiential activities is crucial. It should neither be dull nor overly game-like, and it must not abandon the learning of knowledge. Second, teachers should learn to guide students’ creativity. In the innovation and sharing phase, teachers should encourage students to form their ideas rather than directly telling them, and should not interfere too much with students’ creativity, allowing space for them to achieve knowledge transfer. Third, teachers should focus on cultivating students’ core competencies. Robot courses should not only teach students programming and assembly of kits but also cultivate their emotional attitudes and values. For example, in kit assembly, attention should be paid to cultivating students’ aesthetic sense; during experiential learning, emphasis should be placed on developing students’ awareness of thinking, autonomous inquiry abilities, communication skills, and innovative abilities, thereby establishing students’ interest in learning about robots through problem-solving and human-robot interaction, and realizing the convenience that robotic technology brings to life.
6. Conclusion
Through research, it is evident that intelligent robot courses are one of the effective ways to cultivate innovative talents in elementary and secondary schools. The experiential learning-based teaching model is beneficial for cultivating students’ information literacy, innovative spirit, and practical abilities, providing teachers with new teaching methods and opening up new teaching directions.
At the same time, this research also has some shortcomings. First, the robot course requires a high level of teaching practice experience from teachers. Due to insufficient teaching experience, the experiential learning-based teaching model has not been well applied to robot classrooms. In the specific experiential phases, some students were attracted by the robot kits and neglected knowledge learning; in the discussion phase, some students did not actively participate due to introverted personalities. Second, the experiential learning-based teaching model was only applied to the first-year students at S School in a certain city, with a small sample size, and may not be applicable to students at all educational stages.
The next stage will focus on in-depth research on robot course cases, including the integration of educational robots and robot courses, and the mutual coordination between teachers and classroom environments. This aims to improve the teaching quality of robot courses and enhance students’ innovative abilities and practical skills.
References:
[1] Central Committee of the Communist Party of China, State Council. National Medium- and Long-term Talent Development Plan (2010-2020) [EB/OL]. (2010-06-06) [2022-02-20]. http://www.gov.cn/jrzg/2010-06/06/content_1621777.htm.
[2] Central Committee of the Communist Party of China, State Council. National Innovation-Driven Development Strategy Outline [EB/OL]. (2016-05-19) [2022-02-20]. http://www.gov.cn/xinwen/2016-05/19/content_5074812.htm.
[3] MILLER D P, NOURBAKHSH I R, SIEGWART R. Robots for education [M]. Springer Berlin Heidelberg, 2008.
[4] KHANLARI A. Effects of robotics on 21st century skills [J]. European Scientific Journal, 2013(27).
[5] Huang Ronghuai, Liu Dejian, Xu Jingjing, et al. The current status and trends of educational robots [J]. Modern Educational Technology, 2017, 27(1): 13-20.
[6] MATSUO T, TATSUGUCHI M. Robot engineers training aim of education system development [J]. The Proceedings of JSME Annual Conference on Robotics and Mechatronics (Robomec), 2017: 2-10.
[7] Wang Yi, Zhang Jianping. The characteristics and inspirations of robot education in the United States [J]. Modern Educational Technology, 2007(11): 108-112.
[8] BEER R D, CHIEL H J, DRUSHEL R F. Using autonomous robotics to teach science and engineering [J]. Communications of the ACM, 1999, 42(5): 85-92.
[9] Wang Kai, Sun Zhi, Xi Sennianshou, et al. The current status and trends of robot education in Japan [J]. Modern Educational Technology, 2017, 27(4): 5-11.
[10] Wu Yonghe, Li Tongtong. The current status, practice, reflection, and prospects of robot education from the perspective of machine intelligence [J]. Distance Education Journal, 2018, 36(4): 79-87.
[11] Zhang Jianping, Wang Yi. Robot education: current status, issues, and promotion strategies [J]. China Audio-Visual Education, 2006(12): 65-68.
[12] Wang Tongju. Construction and practice of the “micro-lecture guided learning” teaching model: Taking robot teaching in elementary and secondary schools as an example [J]. China Audio-Visual Education, 2015(2): 112-117.
[13] Central Committee of the Communist Party of China, State Council. New Generation Artificial Intelligence Development Plan [EB/OL]. (2017-07-20) [2022-02-20]. http://www.gov.cn/xinwen/2017-07/20/content_5212064.htm.
[14] Zhong Baichang. Dilemmas and breakthroughs in robot education in primary and secondary schools [J]. People’s Education, 2016(12): 52-55.
[15] Shi Leishan, Wang Canming. David Kolb’s experiential learning [J]. Educational Theory and Practice, 2009, 29(29): 49-50.
[16] Yan Yifeng, Xie Limin. How to conduct experiential teaching: A perspective based on the experiential learning cycle [J]. Curriculum, Teaching Material, and Method, 2012, 32(6): 21-25.
Research on the Teaching Mode of AI Robot Courses in Elementary and Secondary Schools
Jiaxin YUAN1, Xinmei KONG2, Dongyan DU1, Haiguang FANG2*
(1.College of Teacher Education, Capital Normal University, Beijing 100048;2.College of Education, Capital Normal University, Beijing 100048)
Abstract: AI robot courses have certain advantages in cultivating innovative talents. In AI robot courses, students will develop problem awareness and innovative thinking through hands-on practice, which is of great significance to carry out robot education. However, robot education in domestic elementary and secondary schools still mainly orients itself to winning competitions and awards. Besides, the teaching of robot courses lacks a complete and unified curriculum system. Meanwhile, the teaching method of robot courses emphasizes imitation, rather than application. Therefore, the robot curriculum of primary and secondary schools in China urgently needs to be reformed. Based on the experiential learning theory, this paper has applied to the curriculum in elementary and secondary schools the teaching mode of “experiencing context-reflect and observation-summary and internalization-Innovation and sharing” for practical exploration. According to the results, this teaching mode can effectively arouse students’ interest in the curriculum, and cultivate their innovative thinking, which guarantees it a reference for teachers who are about to carry out robot courses.
Keywords: AI robot course; Experiential learning; Teaching mode; Teaching activity design
Edited by: Wang Tianpeng Proofread by: Wang Xiaoming
This issue’s recommended manuscript
New Issue Delivery | “China Educational Informatization” 2022 Issue 10 Directory
2022-10-28
Special Research | Wang Xuejun Wang Hui Zhong Yi, et al.: Online and Offline Hybrid Smart Teaching Model Concept and Practice
2022-11-11
Column Special Feature | Ning Lianju Liu Jingtang Su Fugen: Digital Transformation of Higher Education: Connotation, Dilemmas, and Pathways
2022-11-04
Regional Promotion | Moving Towards Digital Education: The Practical Implications and Strategies for Digital Transformation in Education in Beijing
2022-11-01
Click here to submit online
Journal Introduction
“China Educational Informatization” was founded in August 1995, supervised by the Ministry of Education of the People’s Republic of China, and hosted by the Education Management Information Center of the Ministry of Education. It is a national academic journal published openly at home and abroad. The journal aims to comprehensively and deeply record the progress of educational informatization construction, research and application achievements, and industry development status in China, conduct surveys on the development status of educational informatization in China, and carry out international comparative studies on educational informatization, serving the national macro decision-making in education; strive to accurately grasp the relevant policies and standards of educational informatization, track the development trends of cutting-edge ICT technologies and their integration with education in a timely manner, deeply explore the institutional and mechanism innovations in educational informatization construction and application, serving the practice of educational informatization in China.
Published 12 times a year, on the 20th of each month
20 yuan / issue, postal code: 82-761
Editorial office email: [email protected]
Correspondence address: Room 921, No. 2 Huayuan North Street, Xicheng District, Beijing