Content Introduction
Abstract
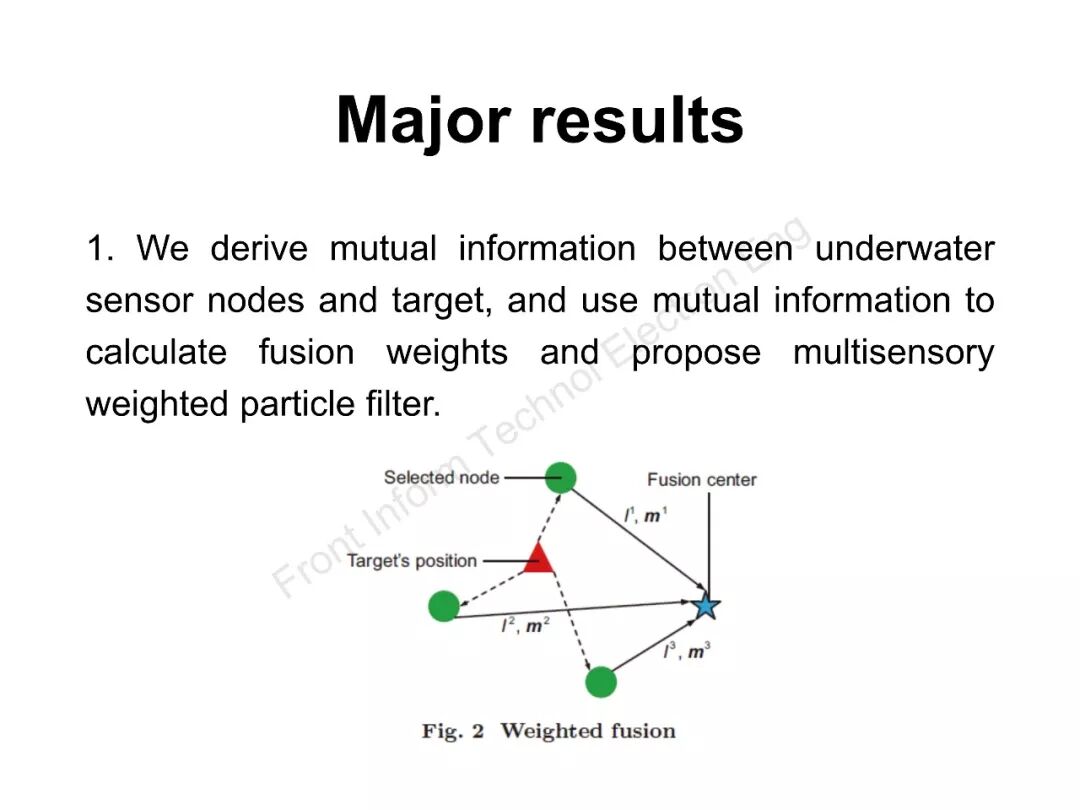
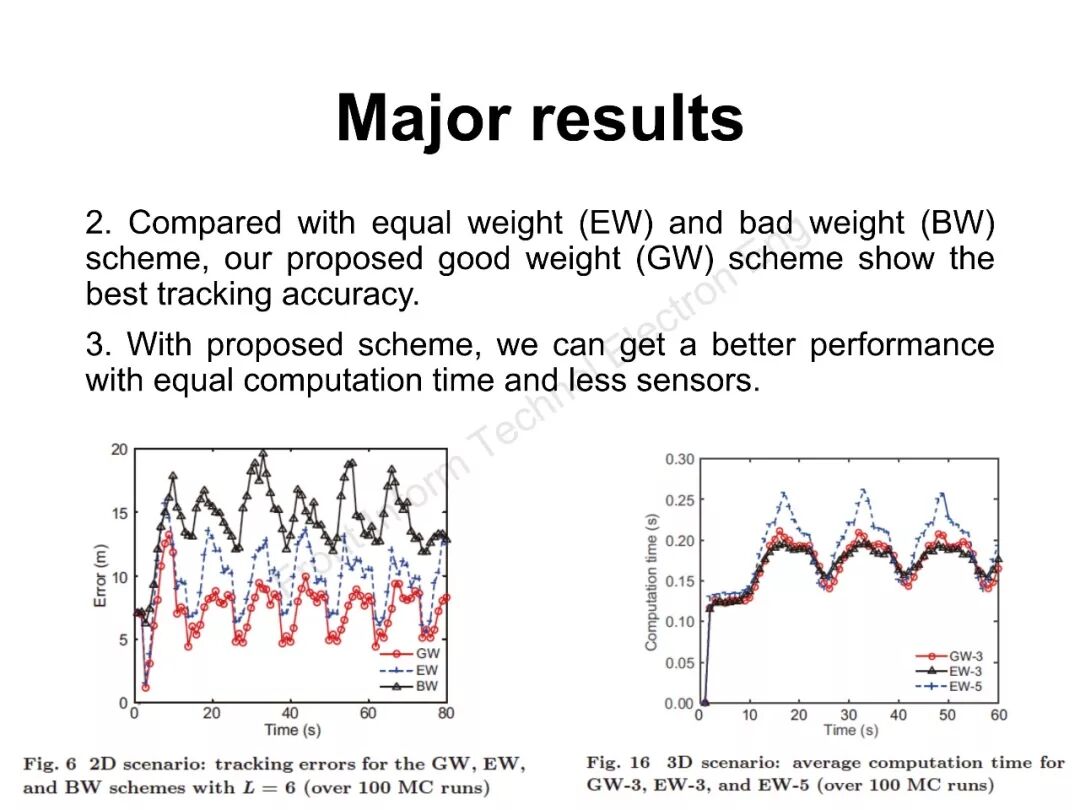
Underwater wireless sensor networks provide reliable and effective support for underwater target tracking problems. However, the energy and bandwidth resources of underwater networks are limited, allowing only a subset of nodes to participate in tracking tasks. The fusion center collects and fuses measurements sent by various sensors for target tracking, making the design of better fusion weights extremely important. To address the weighted fusion problem in underwater target tracking, we first calculate the mutual information between measurements and target states to measure the fusion weights; secondly, we design a new multi-sensor weighted particle filter algorithm using mutual information fusion weights, and employ the Cramer-Rao lower bound to design a node selection scheme to improve the efficiency of the tracking algorithm; finally, we validate the algorithm through simulation experiments. The simulation results show that by selecting appropriate fusion weights, the accuracy of target state estimation is significantly improved.
Keywords
Authors
|
Duo Zhang, Mei-qin Liu, Sen-lin Zhang, Zhen Fan, Qun-fei Zhang Affiliations National Key Laboratory of Industrial Control Technology, Hangzhou, China, 310027; College of Electrical Engineering, Zhejiang University, Hangzhou, China, 310027; School of Marine Engineering, Northwestern Polytechnical University, Xi’an, China, 710072 Citation Format Duo Zhang, Mei-qin Liu, Sen-lin Zhang, Zhen Fan, Qun-fei Zhang, 2018. Mutual-information based weighted fusion for target tracking in underwater wireless sensor networks. Frontiers of Information Technology & Electronic Engineering, 19(4):544-556. https://doi.org/10.1631/FITEE.1601695 |
Summary Guide
Contact Us
The English version of the Zhejiang University Journal is a collective term for four English academic journals, covering various fields in science, engineering, agriculture, and medicine. We welcome submissions to our journal, and you can follow our official WeChat account zdxbywb for more information.。
