✅ Author Bio: A Matlab simulation developer passionate about research, skilled in data processing, modeling simulation, program design, obtaining complete code, paper reproduction, and scientific simulation.
🍎 Personal Homepage:Matlab Research Studio
🍊 Personal Motto: Seek knowledge through investigation; feel free to message for help.
🔥 Content Introduction
Multi-Agent Systems (MAS) have gained significant attention due to their wide applications in areas such as robotic swarm control, drone formations, and traffic flow management. Among them, swarm control is an important cooperative control strategy that allows a large number of agents to self-organize and accomplish collective tasks without centralized control, such as aggregation, shape transformation, and target tracking. This article will delve into the implementation of swarm control in Matlab, covering algorithm design, code implementation, and performance analysis.
1. Overview of Swarm Control Algorithms
The core of swarm control algorithms lies in each agent making decisions based solely on its local perception information, achieving global behavior through local interactions. Common swarm control algorithms include rule-based algorithms, potential field-based algorithms, and optimization-based swarm control.
1. Rule-Based Algorithms: This is the simplest and most commonly used swarm control algorithm. This algorithm guides each agent’s movement through a series of simple rules, such as:
-
Avoiding Collisions: Maintain a safe distance from neighboring agents.
-
Speed Matching: Match the speed of neighboring agents.
-
Aggregation: Move towards the center position of neighboring agents.
These rules are usually represented in vector form and are fused by weighted summation to ultimately derive the control instructions for each agent. The weight parameters of the rules play a crucial role in the final effect of swarm behavior and need to be adjusted and optimized based on specific application scenarios.
2. Potential Field-Based Algorithms: This algorithm treats each agent as a particle moving in a potential field, with its trajectory determined by the gradient of the potential field. The potential field typically consists of attractive and repulsive potentials, where the attractive potential draws agents towards target positions or other agents, while the repulsive potential prevents collisions between agents. Potential field-based algorithms can better handle obstacles and complex environments, but the algorithm’s complexity is relatively high.
3. Optimization-Based Swarm Control: In recent years, optimization-based swarm control methods have also been widely studied. These methods transform the swarm control problem into an optimization problem, where the objective function can be defined as minimizing the distance between agents or maximizing group cohesion. Then, optimization algorithms such as Particle Swarm Optimization (PSO) and Genetic Algorithms (GA) are used to search for optimal control strategies. These methods can handle more complex swarm control tasks but come with higher computational costs.
2. Matlab Program Design and Implementation
This article takes the rule-based swarm control algorithm as an example to explain its implementation in Matlab. The program mainly includes the following modules:
1. Agent Model: Define the state variables of each agent, such as position, velocity, and acceleration, and establish the agent’s dynamic model, for example, using first or second-order integrators to simulate the agent’s movement.
2. Perception Model: Simulate the agent’s ability to perceive the surrounding environment, such as setting a perception radius to determine which other agents each agent can perceive.
3. Control Algorithm: Implement the rule-based swarm control algorithm, calculating each agent’s control instructions based on perception information. This part requires careful design of rule weights and parameter tuning to ensure the stability and efficiency of swarm behavior.
4. Simulation Environment: Create a simulation environment, for example, setting obstacles and target positions, and updating the agents’ states in real-time.
5. Data Visualization: Utilize Matlab’s plotting capabilities to display the agents’ movement trajectories in real-time, facilitating the observation of swarm behavior effects.
Code Example (Snippet):
% Calculate control instructions using rules
% ...
% Update agent positions and velocities
% ...
end
% Plot agent positions
plot(positions(:,1), positions(:,2), 'o');
% ...
3. Performance Analysis and Improvement
The performance of the Matlab program can be evaluated using the following metrics:
-
Convergence Speed: The time required for agents to reach a stable swarm state.
-
Robustness: The stability of the algorithm when faced with disturbances and noise.
-
Scalability: The efficiency of the algorithm when handling a large number of agents.
Based on performance evaluation results, the algorithm can be improved by adjusting rule weights, enhancing the perception model, or introducing more advanced control strategies. Additionally, considerations can be made to extend the algorithm to three-dimensional space and incorporate obstacle avoidance functionalities.
4. Conclusion
This article provides a detailed introduction to the design and implementation of the Matlab program for multi-agent swarm control, with an in-depth discussion of algorithm design, code implementation, and performance analysis. The rule-based swarm control algorithm is simple and easy to understand, and its implementation is relatively straightforward, but its performance is significantly influenced by parameter tuning. Future research may focus on more advanced swarm control algorithms, such as those based on reinforcement learning or deep learning, to achieve smarter and more robust swarm control. At the same time, targeted optimization and improvement of the algorithm based on practical application scenarios will further enhance its practicality. Matlab’s powerful simulation capabilities provide a strong tool for research in multi-agent systems, and it is believed that more studies based on Matlab will emerge in future research.
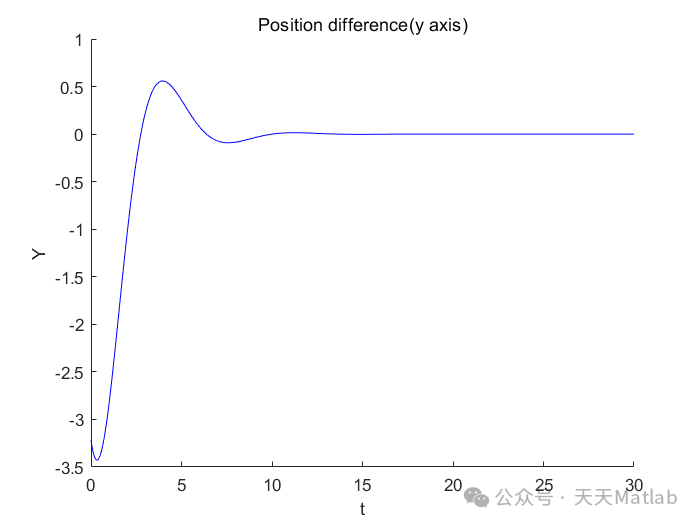
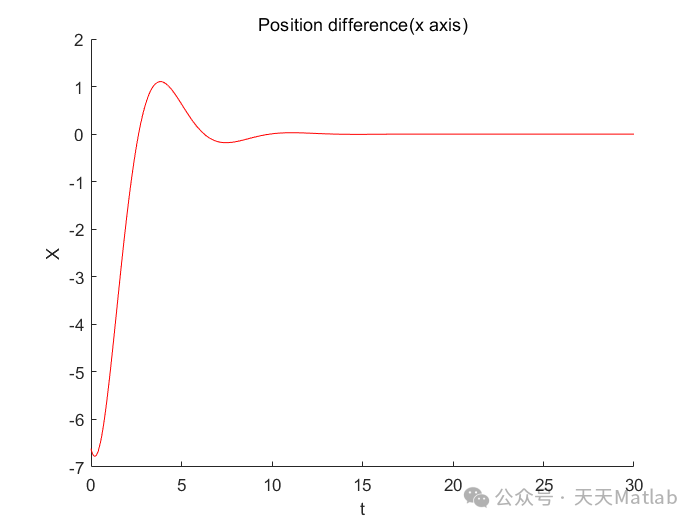
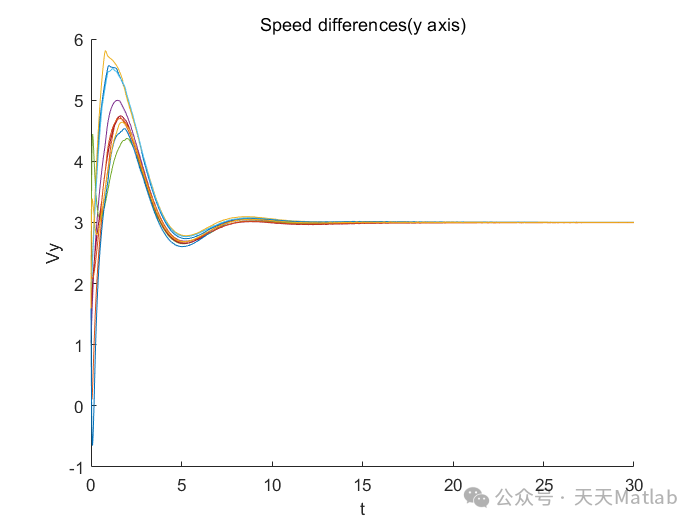
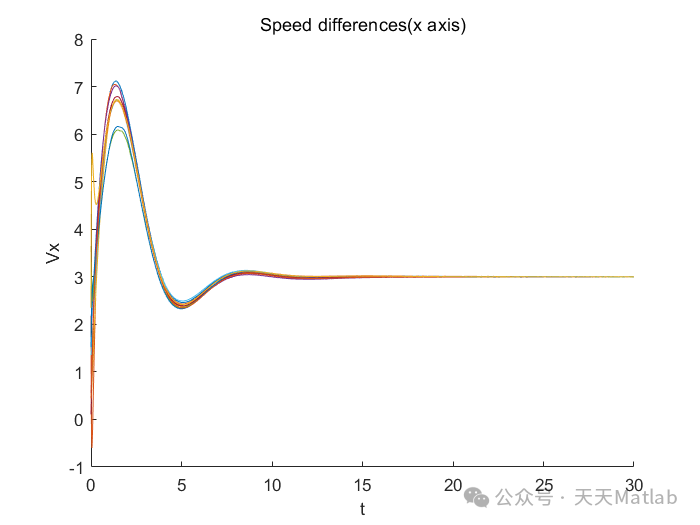
⛳️ Results
🔗 References
[1] Tang Jiyu. Research on Consensus Problems in Multi-Agent Systems [D]. Chang’an University [2025-01-17]. DOI: CNKI:CDMD:2.1014.072011.
[2] Chen Shiming, Li Huimin, Xie Jing, et al. Swarm Control Algorithm Based on Community Division [J]. Information and Control, 2013, 42(5): 536-541. DOI: 10.3724/SP.J.1219.2013.00536.
🎈 Some theoretical references are from online literature; please contact the author for removal if there are any infringements.
👇 Follow me for a wealth of Matlab e-books and mathematical modeling materials.
🎁 Message for complete code and data acquisition and custom paper simulations.
🌿 Past reviews can be found on the homepage; click to search.
🏆 Our team excels in guiding customized Matlab simulations in various research fields, helping realize research dreams:
🌈 Various intelligent optimization algorithm improvements and applications
Production scheduling, economic scheduling, assembly line scheduling, charging optimization, workshop scheduling, departure optimization, reservoir scheduling, three-dimensional packing, logistics site selection, cargo position optimization, bus scheduling optimization, charging pile layout optimization, workshop layout optimization, container ship loading optimization, pump combination optimization, medical resource allocation optimization, facility layout optimization, visual domain base station and drone site selection optimization, backpack problem, wind farm layout, time slot allocation optimization, optimal distributed generation unit allocation, multi-stage pipeline maintenance, factory-center-demand point three-level site selection problem, emergency life material distribution center site selection, base station site selection, road lamp pole layout, hub node deployment, transmission line typhoon monitoring devices, container scheduling, unit optimization, investment optimization portfolio, cloud server combination optimization, antenna linear array distribution optimization, CVRP problem, VRPPD problem, multi-center VRP problem, multi-layer network VRP problem, multi-center multi-vehicle VRP problem, dynamic VRP problem, two-layer vehicle routing planning (2E-VRP), charging vehicle routing planning (EVRP), oil-electric hybrid vehicle routing planning, hybrid flow shop problem, order splitting scheduling problem, bus scheduling optimization problem, flight shuttle vehicle scheduling problem, site selection path planning problem, port scheduling, port bridge scheduling, parking space allocation, airport flight scheduling, leak source location.
🌈 Machine learning and deep learning time series, regression, classification, clustering, and dimensionality reduction
2.1 BP time series, regression prediction, and classification
2.2 ENS voice neural network time series, regression prediction, and classification
2.3 SVM/CNN-SVM/LSSVM/RVM support vector machine series time series, regression prediction, and classification
2.4 CNN|TCN|GCN convolutional neural network series time series, regression prediction, and classification
2.5 ELM/KELM/RELM/DELM extreme learning machine series time series, regression prediction, and classification
2.6 GRU/Bi-GRU/CNN-GRU/CNN-BiGRU gated neural network time series, regression prediction, and classification
2.7 Elman recurrent neural network time series, regression prediction, and classification
2.8 LSTM/BiLSTM/CNN-LSTM/CNN-BiLSTM long short-term memory neural network series time series, regression prediction, and classification
2.9 RBF radial basis neural network time series, regression prediction, and classification
2.10 DBN deep belief network time series, regression prediction, and classification
2.11 FNN fuzzy neural network time series, regression prediction
2.12 RF random forest time series, regression prediction, and classification
2.13 BLS broad learning time series, regression prediction, and classification
2.14 PNN pulse neural network classification
2.15 Fuzzy wavelet neural network prediction and classification
2.16 Time series, regression prediction and classification
2.17 Time series, regression prediction prediction and classification
2.18 XGBOOST ensemble learning time series, regression prediction prediction and classification
2.19 Transform various combinations time series, regression prediction prediction and classification
Directions cover wind power prediction, photovoltaic prediction, battery life prediction, radiation source identification, traffic flow prediction, load forecasting, stock price prediction, PM2.5 concentration prediction, battery health status prediction, electricity consumption prediction, water body optical parameter inversion, NLOS signal identification, subway parking accurate prediction, transformer fault diagnosis.
🌈 Image processing aspects
Image recognition, image segmentation, image detection, image hiding, image registration, image stitching, image fusion, image enhancement, image compressed sensing.
🌈 Path planning aspects
Traveling salesman problem (TSP), vehicle routing problem (VRP, MVRP, CVRP, VRPTW, etc.), drone three-dimensional path planning, drone collaboration, drone formation, robot path planning, grid map path planning, multimodal transport problems, charging vehicle routing planning (EVRP), two-layer vehicle routing planning (2E-VRP), oil-electric hybrid vehicle routing planning, ship trajectory planning, full path planning, warehouse patrol.
🌈 Drone application aspects
Drone path planning, drone control, drone formation, drone collaboration, drone task allocation, drone safe communication trajectory online optimization, vehicle collaborative drone path planning.
🌈 Communication aspects
Sensor deployment optimization, communication protocol optimization, routing optimization, target location optimization, Dv-Hop positioning optimization, Leach protocol optimization, WSN coverage optimization, multicast optimization, RSSI positioning optimization, underwater communication, communication upload and download allocation.
🌈 Signal processing aspects
Signal recognition, signal encryption, signal denoising, signal enhancement, radar signal processing, signal watermark embedding and extraction, electromyography signals, electroencephalography signals, signal timing optimization, electrocardiogram signals, DOA estimation, encoding and decoding, variational mode decomposition, pipeline leakage, filters, digital signal processing + transmission + analysis + denoising, digital signal modulation, bit error rate, signal estimation, DTMF, signal detection.
🌈 Power system aspects
Microgrid optimization, reactive power optimization, distribution network reconstruction, energy storage configuration, orderly charging, MPPT optimization, household electricity.
🌈 Cellular automata aspects
Traffic flow, crowd evacuation, virus spread, crystal growth, metal corrosion.
🌈 Radar aspects
Kalman filtering tracking, trajectory association, trajectory fusion, SOC estimation, array optimization, NLOS identification.
🌈 Workshop scheduling
Zero-wait flow shop scheduling problem NWFSP, permutation flow shop scheduling problem PFSP, hybrid flow shop scheduling problem HFSP, zero idle flow shop scheduling problem NIFSP, distributed permutation flow shop scheduling problem DPFSP, blocking flow shop scheduling problem BFSP.
👇