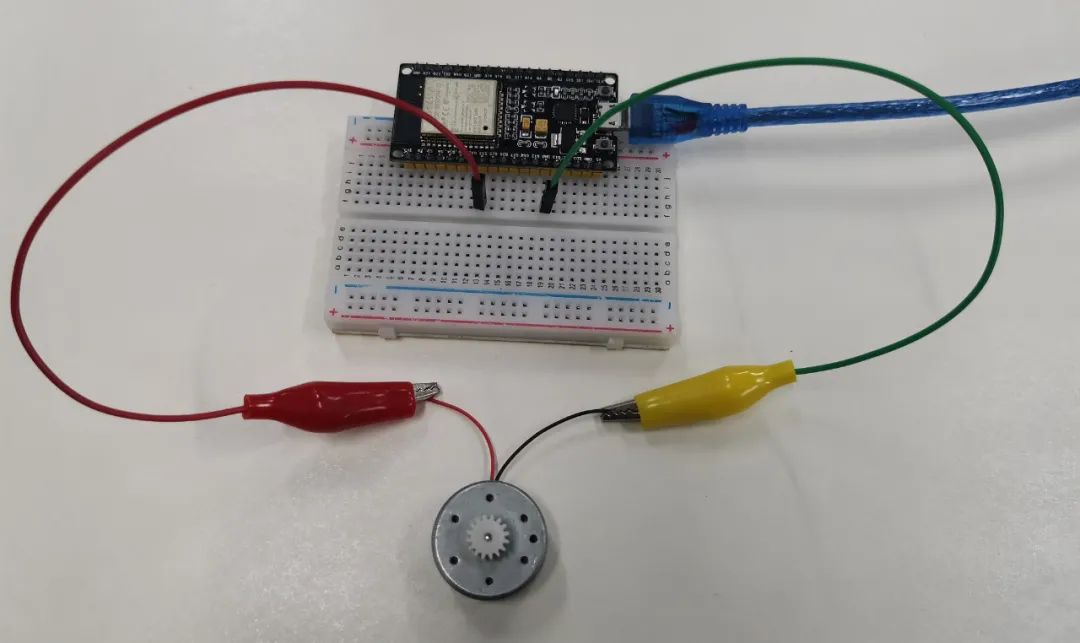
Overall View of the Device
Last time, when detecting the current changes before and after the rotor of the small motor got stuck using ESP32, the induced electromotive force when the small motor was driven by an external force was measured. However, the changes in electromotive force were too drastic, and the data jumps were too obvious, which was not conducive to experimental demonstration and analysis.
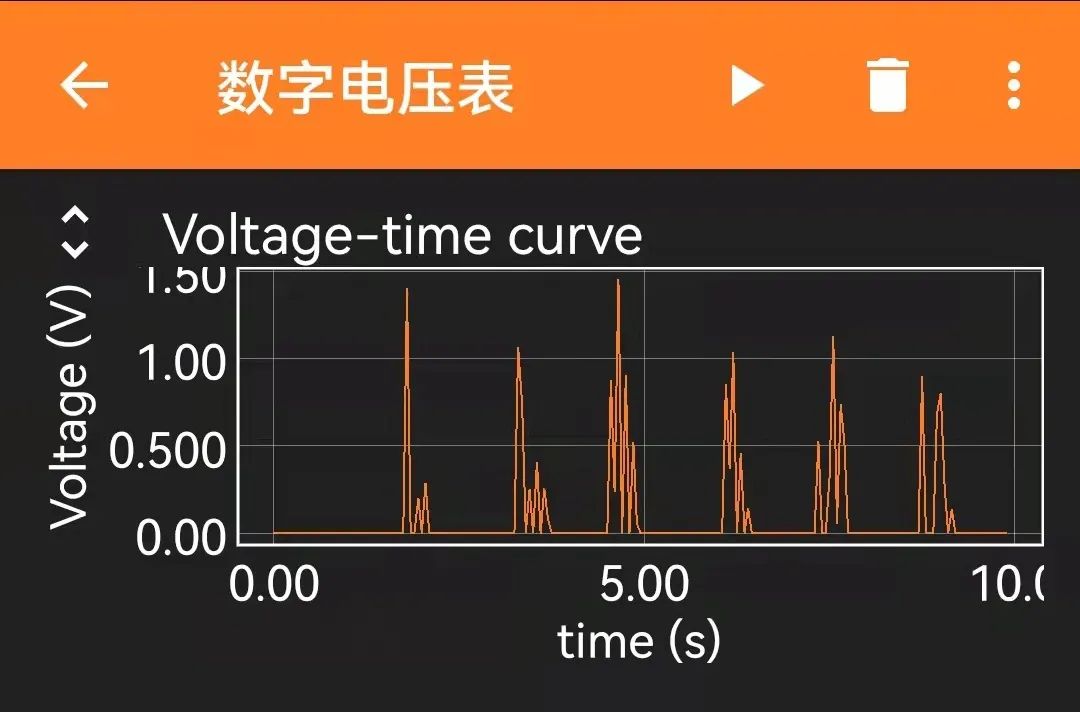
Raw Induced Electromotive Force Output
To solve this problem, the microcontroller processed the electromotive force signal transmitted from the ESP32 via Bluetooth with Gaussian smoothing in the Phyphox editor, and then performed graphical plotting and numerical display. It was found that the curve of the induced electromotive force over time became much smoother.

Close-Up of the Device
By gently rotating the rotor of the small motor by hand, there is a change in the induced electromotive force output on the two power lines of the small motor.

Electromotive Force Output After Gaussian Smoothing Filter
When power is supplied to the motor, it will rotate, converting electrical energy into mechanical energy; by driving the rotor of the motor to rotate with external force, the motor will turn into a generator, outputting electrical energy. The mutual conversion of electrical energy and mechanical energy is such a convenience, such a wonder.