I am Lao Wen, an embedded engineer who loves learning.Follow me to become even better together!Program Structure Optimization
1. Program Writing Structure
Although the writing format does not affect the quality of the generated code, certain writing rules should still be followed during actual programming. A clearly written program is beneficial for future maintenance.
When writing programs, especially for statements like while, for, do…while, if…else, switch…case, or combinations of these statements, a “structured” writing format should be adopted.
2. IdentifiersIn the program, user-defined identifiers should not only follow naming conventions but also avoid using algebraic symbols (like a, b, x1, y1) as variable names. Instead, choose meaningful English words (or abbreviations) or Pinyin to enhance program readability, such as: count, number1, red, work, etc.3. Program Structure C is a high-level programming language that provides a complete set of standardized control structures. Therefore, when designing microcontroller application system programs in C, it is essential to adopt a structured programming approach as much as possible. This makes the entire application system program structure clear and facilitates debugging and maintenance.
For a larger application program, the entire program is usually divided into several modules based on functionality, with different modules performing different functions.
Each module can be written separately, and even by different programmers. Generally, the functionality of a single module is relatively simple, making design and debugging easier. In C, a function can be considered a module.
Modular programming not only involves dividing the entire program into several functional modules but also emphasizes maintaining the relative independence of variables between modules, i.e., keeping modules independent and minimizing the use of global variables. Commonly used functional modules can also be encapsulated into an application library for direct invocation when needed.
However, if modules are divided too finely, it may lead to reduced execution efficiency (the time taken to save and restore registers when entering and exiting a function consumes some time).
4. Defining ConstantsDuring program design, for frequently used constants, if they are directly written into the program, any change in their values will require finding and modifying each instance in the program, which inevitably reduces maintainability. Therefore, it is advisable to define constants using preprocessor commands to avoid input errors.5. Reducing Conditional Statements Wherever conditional compilation (ifdef) can be used, it should be preferred over if statements, as it helps reduce the length of the generated code.6. Expressions For expressions where the order of operations is unclear or easily confused, parentheses should be used to explicitly specify their precedence. An expression should not be overly complex; if it is too complicated, it will be difficult to understand later, hindering future maintenance.7. Functions For functions in the program, the type of the function should be specified before use, ensuring it matches the originally defined function type. Functions with no parameters and no return type should be marked with “void”. If code length needs to be shortened, common code segments can be defined as functions.If execution time needs to be reduced, after debugging, some functions can be replaced with macro definitions. Note that macros should only be defined after debugging, as most compilers report errors only after macro expansion, which complicates debugging.8. Minimize Global Variables, Use Local Variables More Global variables occupy data memory; defining a global variable reduces the available data memory space for the MCU. If too many global variables are defined, it may lead to insufficient memory allocation by the compiler. Local variables, on the other hand, are mostly located in the MCU’s internal registers, and in most MCUs, using register operations is faster than using data memory, allowing for higher quality code generation. Additionally, the registers and data memory occupied by local variables can be reused across different modules.9. Set Appropriate Compiler Options Many compilers offer various optimization options. Before use, one should understand the meaning of each optimization option and select the most suitable one. Generally, once the highest level of optimization is selected, the compiler may excessively pursue code optimization, potentially affecting program correctness and causing runtime errors.Therefore, it is essential to be familiar with the compiler being used and to know which parameters will be affected by optimization and which will not.Code Optimization
1. Choose Appropriate Algorithms and Data Structures
Familiarity with algorithm languages is essential. Replace slower sequential search methods with faster binary search or hash search methods, and replace insertion sort or bubble sort with quick sort, merge sort, or heap sort to significantly improve program execution efficiency.
Choosing an appropriate data structure is also crucial. For example, using a lot of insert and delete instructions in a randomly stored dataset is much faster than using a linked list. Arrays and pointers are closely related; generally, pointers are more flexible and concise, while arrays are more intuitive and easier to understand. For most compilers, using pointers generates shorter code and higher execution efficiency than using arrays.
However, in Keil, the opposite is true; using arrays generates shorter code than using pointers.
2. Use the Smallest Data Types PossibleIf a variable can be defined using a character type (char), do not use an integer type (int); if it can be defined using an integer type, do not use a long integer (long int); and if a floating-point type (float) is not necessary, do not use it.Of course, after defining a variable, do not exceed its scope. If a value is assigned beyond the variable’s range, the C compiler will not report an error, but the program’s runtime result will be incorrect, and such errors are difficult to detect.
3. Use Increment and Decrement Instructions
Using increment and decrement instructions and compound assignment expressions (like a-=1 and a+=1) usually generates high-quality program code. Compilers can typically generate instructions like inc and dec, while using a=a+1 or a=a-1 often results in 2-3 bytes of instructions generated by many C compilers.
4. Reduce Computational IntensityReplace complex expressions with simpler ones that perform the same function. For example:(1) Modulus Operation
a=a%8;
Can be changed to:a=a&7;
Explanation: Bitwise operations can be completed in one instruction cycle, while most C compilers call a subroutine to perform the “%” operation, resulting in longer code and slower execution. Generally, for remainders of 2^n, bitwise operations can be used instead.
(2) Square Operationa=pow(a,2.0);Can be changed to:a=a*a;Explanation: In microcontrollers with built-in hardware multipliers (like the 51 series), multiplication is much faster than squaring, as floating-point squaring is implemented through subroutine calls. In AVR microcontrollers with built-in hardware multipliers, like ATMega163, multiplication can be completed in just 2 clock cycles.Even in AVR microcontrollers without built-in hardware multipliers, the subroutine for multiplication is shorter and faster than that for squaring. For cubing, for example:a=pow(a,3.0);Can be changed to:a=a*a*a;Efficiency improvements are even more pronounced.(3) Use Shifts for Multiplication and Divisiona=a*4;b=b/4;Can be changed to:a=a<<2;b=b>>2;Explanation: Generally, if multiplication or division by 2^n is needed, shifts can be used instead. In ICCAVR, multiplication by 2^n generates left shift code, while multiplication by other integers or division by any number calls multiplication/division subroutines.Using shifts yields more efficient code than calling multiplication/division subroutines. In fact, any multiplication or division by an integer can be achieved using shifts, such as:a=a*9Can be changed to:a=(a<<3)+a;
5. Loops
(1) Loop StatementsFor tasks that do not require the loop variable to participate in calculations, they can be placed outside the loop. These tasks include expressions, function calls, pointer operations, array accesses, etc. All unnecessary operations should be grouped together and placed in an init initialization program.
(2) Delay FunctionsCommonly used delay functions typically use increment forms:
void delay (void){unsigned int i;for (i=0;i<1000;i++); }Can be changed to decrement delay functions:
void delay (void){unsigned int i;for (i=1000;i>0;i--); }The delay effect of both functions is similar, but almost all C compilers generate 1-3 bytes less code for the latter function because almost all MCUs have instructions for zero transfer, allowing this method to generate such instructions. The same applies when using while loops; using decrement instructions to control the loop generates 1-3 bytes less code than using increment instructions.However, when there are instructions in the loop that read/write arrays using the loop variable “i”, using pre-decrement loops may cause array out-of-bounds issues, which should be noted.(3) While Loops and Do…While LoopsWhen using while loops, there are two forms:
unsigned int i;i=0;while (i<1000){i++; // User program} or: unsigned int i;i=1000;do{i--; // User program}while (i>0);In these two loops, the code generated by the do…while loop is shorter than that generated by the while loop.
6. Lookup Tables
In programs, avoid performing very complex calculations, such as floating-point multiplication, division, and square roots, as well as complex mathematical model interpolation calculations. For these time-consuming and resource-intensive operations, it is advisable to use lookup tables and place the data tables in program storage.
If directly generating the required table is difficult, it is advisable to calculate it at startup and then generate the required table in data storage, allowing for direct lookup during program execution, thus reducing the workload of repeated calculations during execution.
7. Others
For example, using inline assembly and storing strings and constants in program storage are beneficial for optimization.
Multiplication and Division Optimization
The market for microcontrollers is highly competitive, and many applications choose to use small resource 8-bit MCU chips with small program storage (like 1K, 2K) for cost-effectiveness. Generally, these MCUs lack hardware multiplication and division instructions. When multiplication and division operations are necessary, relying solely on the compiler to call internal function libraries often results in larger code size and lower execution efficiency.
Shanghai Shengxi Microelectronics has launched the MC30 and MC32 series MCUs, which adopt RISC architecture and have a large user base and wide applications in the small resource 8-bit MCU field. This article uses the instruction sets of these two series from Shengxi Microelectronics as examples, combined with assembly and C compilation platforms, to introduce a time-saving and resource-saving multiplication and division algorithm.
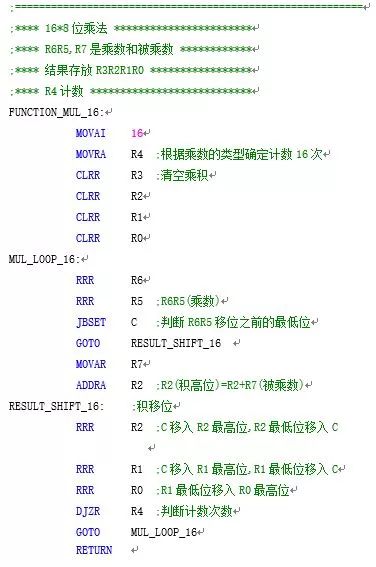
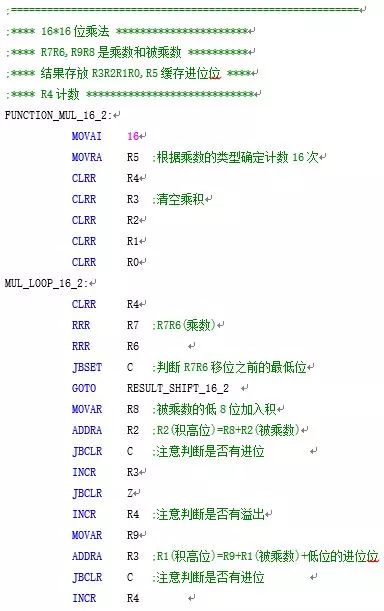
1. Multiplication Section
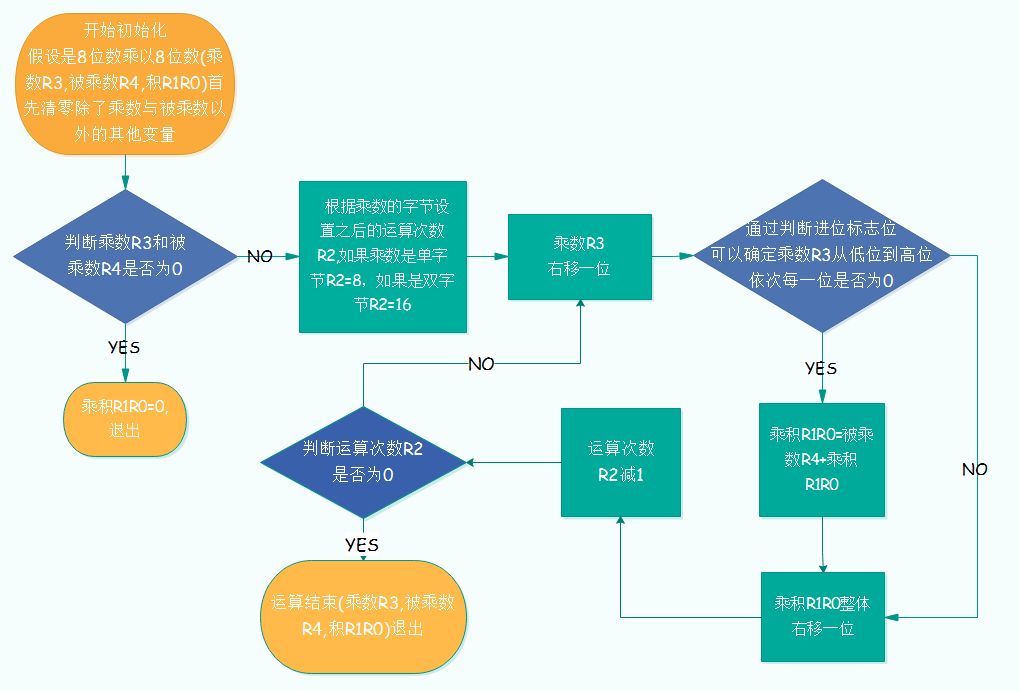
Multiplication in microcontrollers is binary multiplication, which involves multiplying each bit of the multiplier with the multiplicand and then summing the results. Since both the multiplier and multiplicand are binary, each multiplication step can be implemented using shifts.
For example: Multiplier R3=01101101, multiplicand R4=11000101, product R1R0. The steps are as follows:
1. Clear the product R1R0;
2. The 0th bit of the multiplier is 1, so the multiplicand R4 needs to be multiplied by binary 1, which means left shifting by 0 bits and adding to R1R0;
3. The 1st bit of the multiplier is 0, ignore;
4. The 2nd bit of the multiplier is 1, so the multiplicand R4 needs to be multiplied by binary 100, which means left shifting by 2 bits and adding to R1R0;
5. The 3rd bit of the multiplier is 1, so the multiplicand R4 needs to be multiplied by binary 1000, which means left shifting by 3 bits and adding to R1R0;
6. The 4th bit of the multiplier is 0, ignore;
7. The 5th bit of the multiplier is 1, so the multiplicand R4 needs to be multiplied by binary 100000, which means left shifting by 5 bits and adding to R1R0;
8. The 6th bit of the multiplier is 1, so the multiplicand R4 needs to be multiplied by binary 1000000, which means left shifting by 6 bits and adding to R1R0;
9. The 7th bit of the multiplier is 0, ignore;
10. At this point, the value in R1R0 is the final product, and the algorithm is complete.
The result of the above example:
R1R0 = R3 * R4= (R4<<6)+(R4<<5)+(R4<<3)+(R4<<2)+R4 = 101001111100001
The actual operation flowchart is shown below:
In actual program design, program optimization has two goals: improving program execution efficiency and reducing code size. Let’s look at the efficiency and code size comparison between the assembly algorithm provided in this article and ordinary C programming.
Table 1.1 shows the comparison data for program execution efficiency (there may be slight deviations). It is evident that the execution time compiled from assembly is significantly less than that from C language.
|
|
|
|
|
|
|
|
|
|
|
|
Table 1.1 Comparison of Clock Cycles for Multiplication OperationsTable 1.2 shows the comparison data for program code size (there may be slight deviations), and assembly occupies significantly less program space than C language.
|
|
|
|
|
|
|
|
|
|
|
|
Table 1.2 Comparison of ROM Space Usage for Multiplication OperationsIn summary, the multiplication algorithm introduced in this article performs significantly better in all aspects than C compilation. If you encounter issues where the existing program does not meet application requirements, such as insufficient program space or excessive runtime, you can optimize it using the methods outlined above.Assembly language is the closest to machine language. In assembly language, you can directly manipulate registers and adjust the execution order of instructions. Since assembly language directly interfaces with the hardware platform, and different hardware platforms have significant differences in instruction sets and cycles, this can complicate program portability and maintenance. Therefore, we have provided multiplication operation examples tailored for reduced instruction sets to facilitate portability and understanding.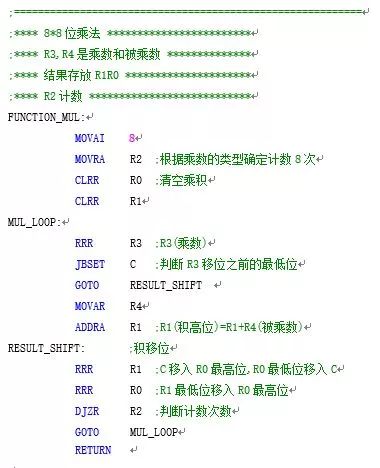
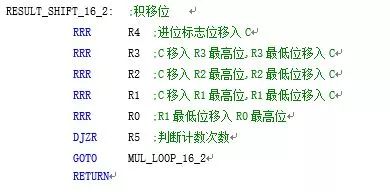 2. Division Section Division in microcontrollers is also binary division, similar to mathematical division in reality. It starts from the high bit of the dividend, performing bitwise division by the divisor and taking the remainder, which is then combined with the subsequent bits of the dividend for further division until it cannot be divided anymore. Since division in microcontrollers is binary, the quotient at each step can only be 1. For example: Dividend R3R4=1100110001101101, divisor R5=11000101, quotient R1R0, remainder R2. The steps are as follows:1. Clear the quotient R1R0 and remainder R2;2. Release the highest bit of the dividend, the 15th bit, which is 1. Since 1 is less than the divisor, the quotient is 0, and the remainder R2 is 1;3. The previous remainder combined with the next highest bit of the dividend, the 14th bit, gives 11, which is still less than the divisor, so the quotient is 0, and the remainder R2 is 11;4. Until the 8th bit is released, yielding 11001100, which is greater than the divisor, the quotient becomes 1, and the remainder R2 is 111;5. The previous remainder combined with the 7th bit of the dividend gives 1110, which is not greater than the divisor, so the quotient is 0, and the remainder R2 is 1110;6. The previous remainder combined with the 6th bit of the dividend gives 11101, which is not greater than the divisor, so the quotient is 0, and the remainder R2 is 11101;7. Following the above steps, until the 3rd bit of the dividend is released, yielding 11101101, which is greater than the divisor, the quotient becomes 1, and the remainder R2 is 101000;8. The previous remainder combined with the 2nd bit of the dividend gives 1010001, which is not greater than the divisor, so the quotient is 0, and the remainder R2 is 1010001;9. The previous remainder combined with the 1st bit of the dividend gives 10100010, which is not greater than the divisor, so the quotient is 0, and the remainder R2 is 10100010;10. The previous remainder combined with the 0th bit of the dividend gives 101000101, which is greater than the divisor, so the quotient becomes 1, and the remainder R2 is 10000000;11. The final quotient is obtained by arranging all the quotients from left to right, resulting in 100001001, with the remainder being the last calculated remainder 10000000.The result of the above example: R1R0 = R3R4 / R5 = 100001001; R2 = R3R4 % R5 = 10000000The actual operation flowchart is shown below:
2. Division Section Division in microcontrollers is also binary division, similar to mathematical division in reality. It starts from the high bit of the dividend, performing bitwise division by the divisor and taking the remainder, which is then combined with the subsequent bits of the dividend for further division until it cannot be divided anymore. Since division in microcontrollers is binary, the quotient at each step can only be 1. For example: Dividend R3R4=1100110001101101, divisor R5=11000101, quotient R1R0, remainder R2. The steps are as follows:1. Clear the quotient R1R0 and remainder R2;2. Release the highest bit of the dividend, the 15th bit, which is 1. Since 1 is less than the divisor, the quotient is 0, and the remainder R2 is 1;3. The previous remainder combined with the next highest bit of the dividend, the 14th bit, gives 11, which is still less than the divisor, so the quotient is 0, and the remainder R2 is 11;4. Until the 8th bit is released, yielding 11001100, which is greater than the divisor, the quotient becomes 1, and the remainder R2 is 111;5. The previous remainder combined with the 7th bit of the dividend gives 1110, which is not greater than the divisor, so the quotient is 0, and the remainder R2 is 1110;6. The previous remainder combined with the 6th bit of the dividend gives 11101, which is not greater than the divisor, so the quotient is 0, and the remainder R2 is 11101;7. Following the above steps, until the 3rd bit of the dividend is released, yielding 11101101, which is greater than the divisor, the quotient becomes 1, and the remainder R2 is 101000;8. The previous remainder combined with the 2nd bit of the dividend gives 1010001, which is not greater than the divisor, so the quotient is 0, and the remainder R2 is 1010001;9. The previous remainder combined with the 1st bit of the dividend gives 10100010, which is not greater than the divisor, so the quotient is 0, and the remainder R2 is 10100010;10. The previous remainder combined with the 0th bit of the dividend gives 101000101, which is greater than the divisor, so the quotient becomes 1, and the remainder R2 is 10000000;11. The final quotient is obtained by arranging all the quotients from left to right, resulting in 100001001, with the remainder being the last calculated remainder 10000000.The result of the above example: R1R0 = R3R4 / R5 = 100001001; R2 = R3R4 % R5 = 10000000The actual operation flowchart is shown below: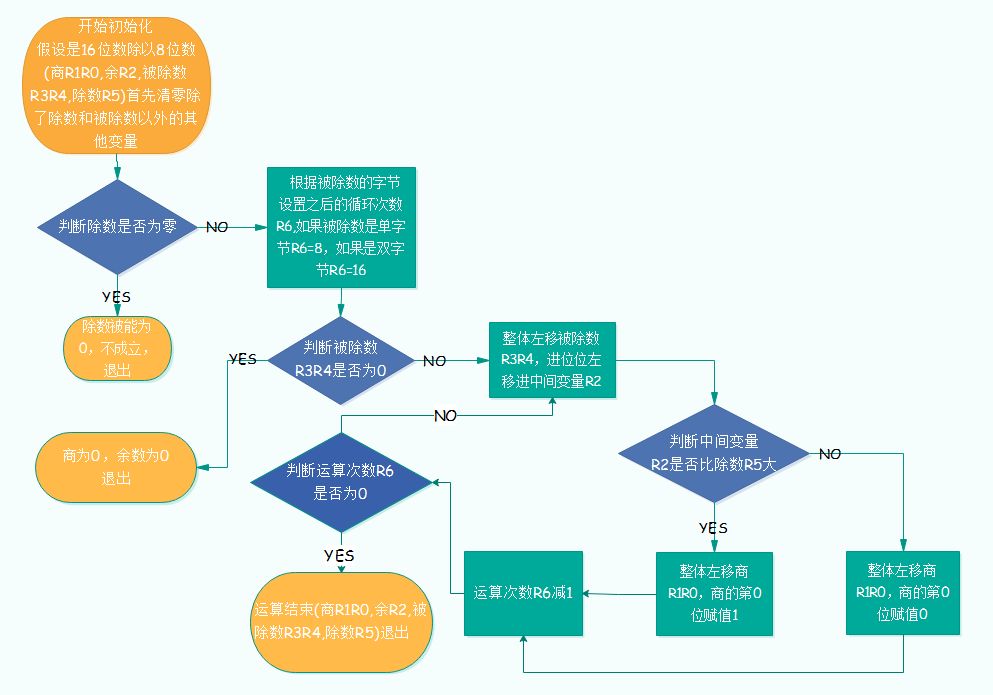 The efficiency and code size of division operations are shown in the following table.Table 2.1 shows the comparison data for program execution efficiency and code size (there may be slight deviations). It is evident that the assembly algorithm provided in this article is significantly optimized.
The efficiency and code size of division operations are shown in the following table.Table 2.1 shows the comparison data for program execution efficiency and code size (there may be slight deviations). It is evident that the assembly algorithm provided in this article is significantly optimized.
|
|
|
|
|
|
|
|
|
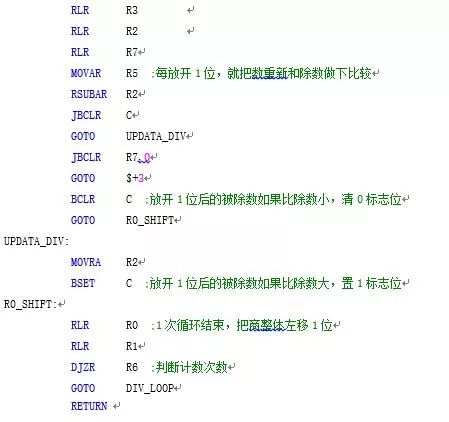
Table 2.1 Comparison of Clock Cycles for Division OperationsThus, the method provided in this article for division operations is also relatively optimal.Below is a division operation example for a reduced instruction set, specifically for 16/8 bit, to facilitate portability and understanding.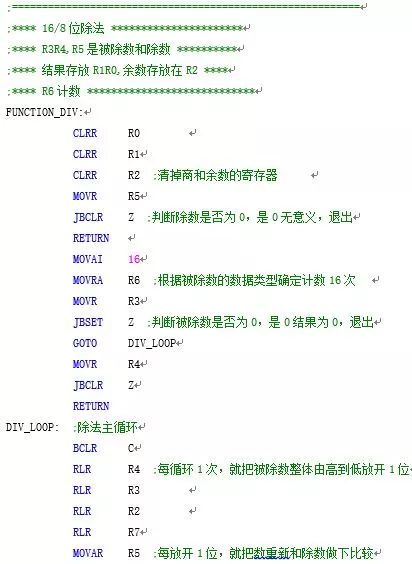
The source of this article is the internet, and the copyright belongs to the original author. If there is any infringement, please contact for removal.
-END-
Previous Recommendations: Click the image to jump to read
A small embedded front and back-end system aimed at MCU application scenarios.

Sharing some embedded software debugging tips to make your development process more efficient!

These two communication methods have become the “norm” in the embedded industrial control field!
I am Lao Wen, an embedded engineer who loves learning.Follow me to become even better together!