Once upon a time…
We were still immersed in the comfort of using pirated J-Link, unaware that the crackdown would come suddenly.
It wasn’t until one day that SEGGER intensified its crackdown on pirated J-Link, and Taobao began to remove listings for JLINK.
With the removal of pirated JLINK, I opened SEGGER’s website for the first time,

Seeing the price of the genuine Jlink, I realized — the feeling of being “choked” on key technologies is so “burning” and painful.
The price of the genuine product is already so high that we ordinary people can only look up at it. You keep yours, we change ours! Let’s call it “ARM Emulator” and continue selling!

However, the quality of the commonly seen “ARM emulators” on the market is truly hard to describe. At least seven or eight of them have broken in my hands!

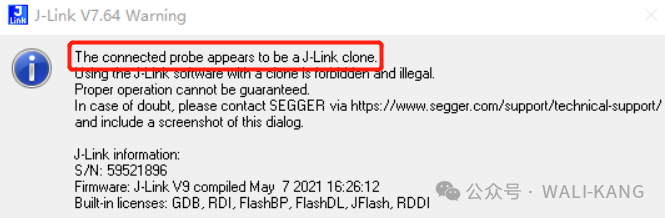
Moreover, SEGGER has introduced detection mechanisms in J-Link firmware and software updates through technical blockades to prevent pirated devices from using new features. Currently, the firmware of pirated JLINK emulators only supports up to version 4.40. If a driver version higher than 4.40 is installed and upgraded, it will cause the Jlink to become unusable. Many users have surely suffered from the errors caused by pirated JLINK!
-
Piracy detection: the connected probe appears to be a j-link clone
-
Connection failure: The connected J-Link is defective 
As a hardworking embedded coder, I am already exhausted from fixing bugs daily, and I have to deal with tools that often “break down,” it’s truly unbearable!
If I could make a dedicated programmer myself, ARMmbed’s open-source DAPLink, which has been around for many years, is definitely the best choice. After all, as the saying goes, standing on the shoulders of giants allows you to see further and walk more steadily!
Porting DAPLINK can be divided into two steps. The first step is to port the online download debugging part of CMSIS-DAP. The latest code location from ARM is in the MDK installation path <span>...\AppData\Local\Arm\\Packs\\ARM\\CMSIS\5.9.0\CMSIS\DAP\Firmware\Source</span>, the current latest version is V2.1.1. The process of porting DAP is actually just the process of interfacing the CMSIS-DAP protocol to the USB protocol stack, the files are as follows:

Improve download speed
Since we are going to do it, we must do it best! To make up for the performance shortcomings of DAPLINK, in terms of hardware, we adopted the high-performance HPM5301 chip from Xianji Semiconductor, which has a main frequency of up to 480MHz and a built-in PHY high-speed USB interface; in terms of software, we replaced the USB protocol with the faster CherryUSB protocol stack and deeply optimized the data processing and communication code in the DAPLink firmware, reducing internal delays and waiting times, and increasing the SWD clock speed to 10MHz.
Special thanks to the author of the CherryUSB protocol stack sakumisu, and the great RCSN from Xianji Semiconductor for their strong technical support. The open-source address for CherryDAP is: https://github.com/cherry-embedded/CherryDAP
The optimized clock rates are as follows:

Compared with the latest J-LINK-V12 speed on the market, the target chip uses STM32H743, and the development environment MDK V5.39, using MicroLink and Jlink V12 to download a 2558KB HEX file to the internal FLASH. Using a logic analyzer to test the clock pin, calculate the time for the entire process of erasing, programming, and verification, the time used by my homemade downloader is 24.205 seconds, while Jlink V12 takes 33.439 seconds. The test data is shown below:
Jlink V12 test results:

MicroLink test results:

| Debugger | Total time (Erase, Program, Verify) |
|---|---|
| MicroLink | 24.205 seconds |
| J-LINK V12 | 33.439 seconds |
From the comparison, it can be found that the download speed has exceeded the latest JLINKV12.
Optimize virtual serial port
DAPLINK also supports a virtual serial port, but the function of the virtual serial port is actually not closely related to DAPLINK. The virtual serial port uses the CDC class device of the USB protocol stack, which is one of the device classes defined by USB, allowing communication devices to transmit data through the USB interface.
With the download speed improved, the speed of USB to serial naturally cannot fall behind. The baud rate speed of a typical USB to serial supports up to 2M, which is already impressive, but who made me use the strongest domestic MCU from Xianji, directly maximizing the serial port performance to support a maximum baud rate of 10M with no packet loss.

Using a logic analyzer to capture the waveform as shown, you can see that the time for each bit transmission is 1/10M=100ns.

Enhance drag and drop download
The above is the basic online download debugging function of porting DAPLINK. The second step is to port the offline download function of DAPLINK. The implementation of the offline programmer mainly relies on the DAP connection protocol in CMSIS-DAP. This part has already been written by ARM officials for us. The DAP offline download mainly consists of several processes: initializing DAP-> connecting DAP to the chip-> confirming the connection method-> clearing the target board read protection (can be ignored)-> erasing the target board Flash-> burning the program-> resetting to run. The connection method includes SWD interface and JTAG interface, and we need to port the official code of <span>DAPLink/source/daplink/interface/swd_host.c</span>.
To achieve offline downloading, after connecting to the chip, the FLASH burning algorithm for the target chip must also be provided to perform the download. Theoretically, we need to provide the corresponding burning algorithm for each chip we want to support. Fortunately, the MDK installation path provides us with such algorithm files. For example, the download algorithm directory for the STM32F1 series is located at <span>...\\Arm\\Packs\\Keil\\STM32F1xx_DFP\\2.0.0\\Flash</span>, and the STM32F10x folder contains the source code for the download algorithm, while the FLM file is the download algorithm.

The FLM file is essentially an ELF format file, and Keil specifies the composition of the FLM file, which is unchanging and includes mandatory flash programming functions Init, UnInit, EraseSector, and ProgramPage. Depending on the device characteristics, functions like EraseChip, BlankCheck, and Verify can be implemented.
Let’s analyze the existing FLM file, taking STM32F4xx_1024.FLM as an example.
Open the command line tool and enter arm-none-eabi-readelf -a STM32F4xx_1024.FLM:
$ arm-none-eabi-readelf -a STM32F4xx_1024.FLM
ELF Header:
Magic: 7f 45 4c 46 01 01 01 00 00 00 00 00 00 00 00 00
Class: ELF32
Data: 2's complement, little endian
Version: 1 (current)
OS/ABI: UNIX - System V
ABI Version: 0
Type: EXEC (Executable file)
Machine: ARM
Version: 0x1
Entry point address: 0x0
Start of program headers: 12172 (bytes into file)
Start of section headers: 12236 (bytes into file)
Flags: 0x5000000, Version5 EABI
Size of this header: 52 (bytes)
Size of program headers: 32 (bytes)
Number of program headers: 2
Size of section headers: 40 (bytes)
Number of section headers: 16
Section header string table index: 15
Section Headers:
[Nr] Name Type Addr Off Size ES Flg Lk Inf Al
[ 0] NULL 00000000 000000 000000 00 0 0 0
[ 1] PrgCode PROGBITS 00000000 000034 000144 00 AX 0 0 4
[ 2] PrgData PROGBITS 00000144 000178 000004 00 WA 0 0 4
[ 3] DevDscr PROGBITS 00000148 00017c 0010a0 00 A 0 0 4
[ 4] .debug_abbrev PROGBITS 00000000 00121c 0005a4 00 0 0 1
[ 5] .debug_frame PROGBITS 00000000 0017c0 000104 00 0 0 1
[ 6] .debug_info PROGBITS 00000000 0018c4 00064c 00 0 0 1
[ 7] .debug_line PROGBITS 00000000 001f10 000218 00 0 0 1
[ 8] .debug_loc PROGBITS 00000000 002128 0001b8 00 0 0 1
[ 9] .debug_macinfo PROGBITS 00000000 0022e0 000614 00 0 0 1
[10] .debug_pubnames PROGBITS 00000000 0028f4 000096 00 0 0 1
[11] .symtab SYMTAB 00000000 00298c 000110 10 12 9 4
[12] .strtab STRTAB 00000000 002a9c 000100 00 0 0 1
[13] .note NOTE 00000000 002b9c 00001c 00 0 0 4
[14] .comment PROGBITS 00000000 002bb8 000334 00 0 0 1
[15] .shstrtab STRTAB 00000000 002eec 0000a0 00 0 0 1
Key to Flags:
W (write), A (alloc), X (execute), M (merge), S (strings), I (info),
L (link order), O (extra OS processing required), G (group), T (TLS),
C (compressed), x (unknown), o (OS specific), E (exclude),
y (purecode), p (processor specific)
There are no section groups in this file.
Program Headers:
Type Offset VirtAddr PhysAddr FileSiz MemSiz Flg Align
LOAD 0x000034 0x00000000 0x00000000 0x00148 0x00148 RWE 0x4
LOAD 0x00017c 0x00000148 0x00000148 0x010a0 0x010a0 R 0x4
Section to Segment mapping:
Segment Sections...
00 PrgCode PrgData
01 DevDscr
There is no dynamic section in this file.
There are no relocations in this file.
There are no unwind sections in this file.
Symbol table '.symtab' contains 17 entries:
Num: Value Size Type Bind Vis Ndx Name
0: 00000000 0 NOTYPE LOCAL DEFAULT UND
1: 00000000 0 NOTYPE LOCAL DEFAULT 1 $t
2: 00000122 0 NOTYPE LOCAL DEFAULT 1 $d
3: 00000144 0 NOTYPE LOCAL DEFAULT 2 $d.realdata
4: 00000148 0 NOTYPE LOCAL DEFAULT 3 $d.realdata
5: 00000000 0 FILE LOCAL DEFAULT ABS FlashPrg.c
6: 00000000 0 SECTION LOCAL DEFAULT 1 .text
7: 00000000 0 FILE LOCAL DEFAULT ABS FlashDev.c
8: 00000148 4256 SECTION LOCAL DEFAULT 3 .constdata
9: 00000000 0 NOTYPE GLOBAL HIDDEN ABS BuildAttributes$$THM_ISAv
10: 00000001 28 FUNC GLOBAL HIDDEN 1 GetSecNum
11: 0000001d 46 FUNC GLOBAL HIDDEN 1 Init
12: 0000004b 14 FUNC GLOBAL HIDDEN 1 UnInit
13: 00000059 44 FUNC GLOBAL HIDDEN 1 EraseChip
14: 00000085 76 FUNC GLOBAL HIDDEN 1 EraseSector
15: 000000d1 82 FUNC GLOBAL HIDDEN 1 ProgramPage
16: 00000148 4256 OBJECT GLOBAL HIDDEN 3 FlashDevice
No version information found in this file.
Displaying notes found at file offset 0x00002b9c with length 0x0000001c:
Owner Data size Description
ARM 0x0000000c Unknown note type: (0x40000000)
Through the Symbol table information, we can find the positions of the Init, UnInit, EraseSector, and ProgramPage functions.
There is one most important step left, where do we get the files to be burned?
-
Place the file to be burned in external flash and read it through the file system (offline download) -
Simulate a USB flash drive, drag the burning file to the USB flash drive, and directly forward it in packets (drag and drop download)
The two methods of obtaining files correspond to two ways of offline downloading, and the DAPLINK source code provides the drag and drop download method. However, the downside is that the official DAPLINK drag and drop burning only targets a specific model of MCU. To support other MCUs, the firmware of the debugger must be manually updated, which raises the threshold for users and makes such a convenient function less appealing.
As a downloader, if it can only perform offline downloads for one chip, it is too unqualified. Therefore, I have made adaptations for a large number of Cortex-M series chips, including STM32 from STMicroelectronics and GD32 from GigaDevice, and I am continuously adding support for other models.
The USB drag and drop download supports HEX and BIN files. HEX files carry address information and automatically select the burning position based on the addresses in HEX, while BIN files default to downloading at address 0x08000000. The following demonstration video shows copying a HEX file to the USB flash drive to complete firmware downloading:
Seeing this, the homemade downloader can already meet my daily needs, but do you think it ends here?
Built-in ymodem protocol
As a coder who has been moving bricks for nearly ten years, I know that not every device will reserve SWD or JTAG interfaces after installation, and there are definitely some lingering bugs in factory products waiting to be fixed.
So can we provide a stable and reliable BootLoader program embedded in the product, so that once an upgrade is needed, customers can simply drag the upgrade file onto the virtual USB drive through the reserved serial port,485, or other communication interfaces, and automatically complete the firmware upgrade? Just like this: the video shows copying a bin file to the USB flash drive to complete the transmission of the upgrade file
To achieve such functionality, I built the ymodem file transfer protocol into this downloader. The Ymodem protocol maintains data integrity during multiple retransmissions, making it very suitable for firmware updates in embedded systems.
YModem protocol is a serial communication file transfer protocol, improved based on the earlier XModem protocol, adding support for batch transfer of multiple files and providing metadata information such as file name, size, and modification date during transmission. It usesCRC (Cyclic Redundancy Check) for error detection, offering higher transmission efficiency compared to XModem and supporting a data block size of 1KB (YModem-1K), thus speeding up the transfer of large files.

To use the built-in ymodem protocol to send files, merely having the downloader is not enough; the target device must also support receiving files via the ymodem protocol. If one is to do good, they must do it thoroughly. I have created a very stable and reliable BootLoader open-source code framework:
MicorLink Introduction:
https://microboot.readthedocs.io/zh-cn/latest/tools/microlink/microlink/
MicorBoot Introduction:
https://microboot.readthedocs.io/zh-cn/latest/
MicorBoot Open-source Code:
https://github.com/Aladdin-Wang/MicroBoot
At this point, the functionality of this downloader has been basically completed, but it is far from over…
Feature highlights
[√] Supports SWD/JTAG interface, download and debug speed surpassing JLINK V12 (clock 10Mhz)
[√] Supports downloading and debugging ARM/RISC-V chips using OpenOCD IDE
[√] Supports USB to serial with a maximum baud rate of 10M with no packet loss
[√] Supports USB flash drive drag and drop download for a large number of Cortex-M series chips, with built-in numerous download algorithms for automatic chip recognition
[√] Built-in ymodem protocol stack, automatically triggers ymodem to transfer files to the target device via serial port when files are dragged onto the USB flash drive (requires cooperation with a bootloader that supports ymodem protocol)
[√] Supports system firmware upgrades, allowing for the addition of more features in the future
[√] Uses winusb for driver-free plug-and-play on Windows 10
[√] Supports 3V3/5V high current output power supply
[√] Built-in reverse current and overcurrent protection, preventing external current from flowing back into the USB port and damaging it
[ ] Supports reading target chip firmware via USB flash drive
[ ] Supports reading any files from the target chip via USB flash drive
[ ] Supports offline downloading for Cortex-M series chips, automatically recognizing target chips and triggering downloads
[ ] Supports drag and drop downloading for RISC-V series chips, with built-in numerous download algorithms for automatic chip recognition
[ ] Supports offline downloading for RISC-V series chips, automatically recognizing target chips and triggering downloads

Combining the above features provides developers with a one-stop solution for downloading, debugging, mass production, after-sales maintenance, and firmware upgrades.
Product Purchase Link:<span>https://item.taobao.com/item.htm?ft=t&id=826800975011</span>
Follow the public account:
Scan the code to join the embedded exchange group:
