The offset function allows for the transfer of a range of motion statements from a previously taught program, shifting the teaching position to a different location. The offset function performs the following operations: (1) It shifts and transforms the position data in the motion statements relative to the existing program as a whole or a specific range. (2) The results after the offset transformation are input into a new program or the existing program. (3) It repeatedly executes the same offset transformation relative to other programs.
The transformed position data follows these rules:
1. Position Data:
(1) Position data based on Cartesian coordinates is transformed into Cartesian coordinates, while position data based on joint coordinates is transformed into joint coordinates.
(2) If the joint coordinate position data becomes a value outside the movable range of the axis after transformation, it is stored as an unteached value. The Cartesian coordinate position data is stored as the transformed value.
(3) Position data in the position register is not transformed.
(4) Motion statements with incremental commands that are based on joint coordinate values are stored as unteached values.
2. Position data based on Cartesian coordinates and Cartesian coordinate system numbers (UT, UF):
(1) The same Cartesian coordinate system number is used before and after the transformation.
(2) However, during the transformation (on the offset information input screen), the user coordinate system number uses UF=0. The position data is displayed after being transformed into the Cartesian coordinate system with UF=0 (world coordinate system).
(3) The form of position data based on Cartesian coordinates (axis configuration, rotation count) remains the same before and after the transformation.
(4) However, regarding the rotation count, if the wrist axis rotates significantly over 180° before and after the transformation, the rotation count of that axis is optimized, and a message is displayed to the user asking whether to adopt the result.
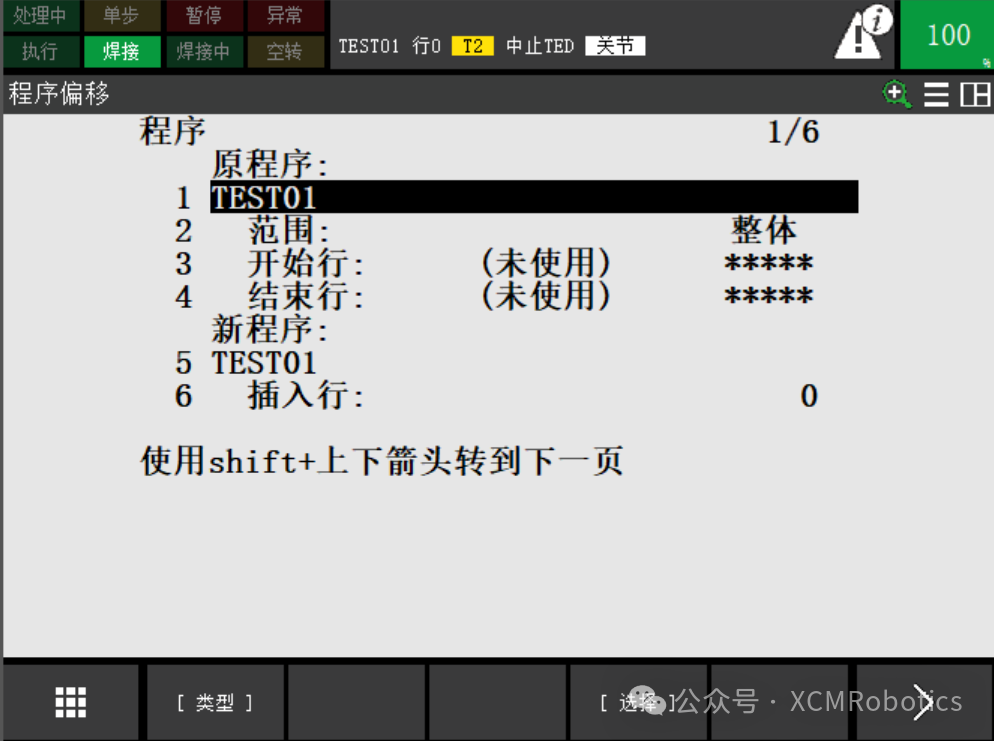
Menu — Utilities — Program Offset, to enter the main interface for program offset settings:
 Setting interface when rotation selection is OFF:
Setting interface when rotation selection is OFF: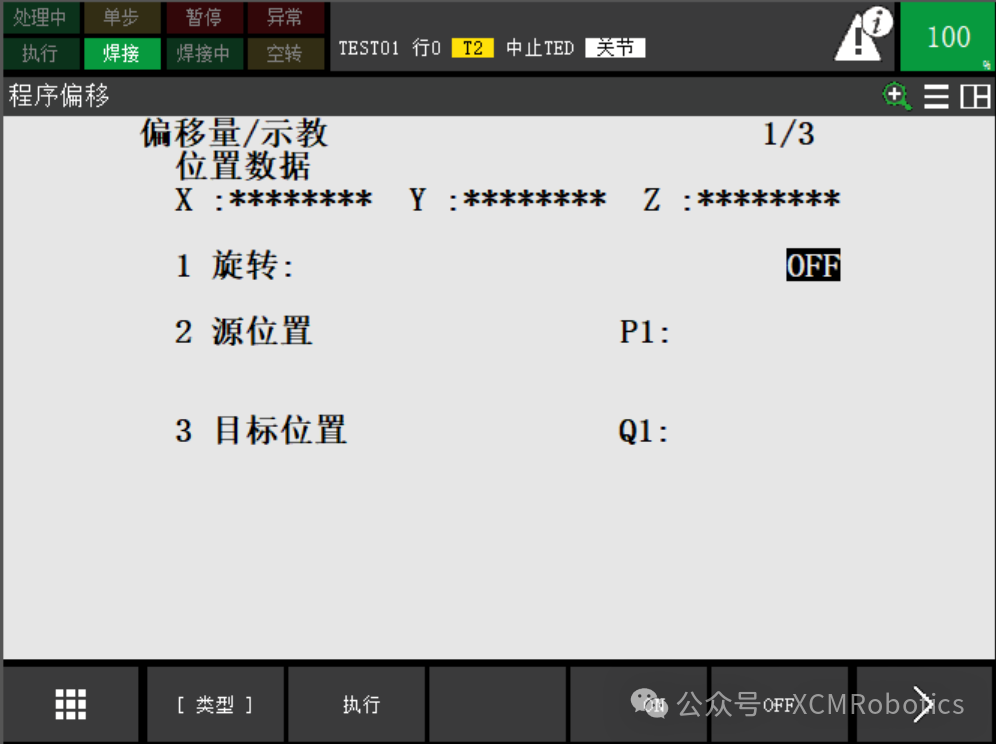 Setting interface when rotation selection is ON:
Setting interface when rotation selection is ON: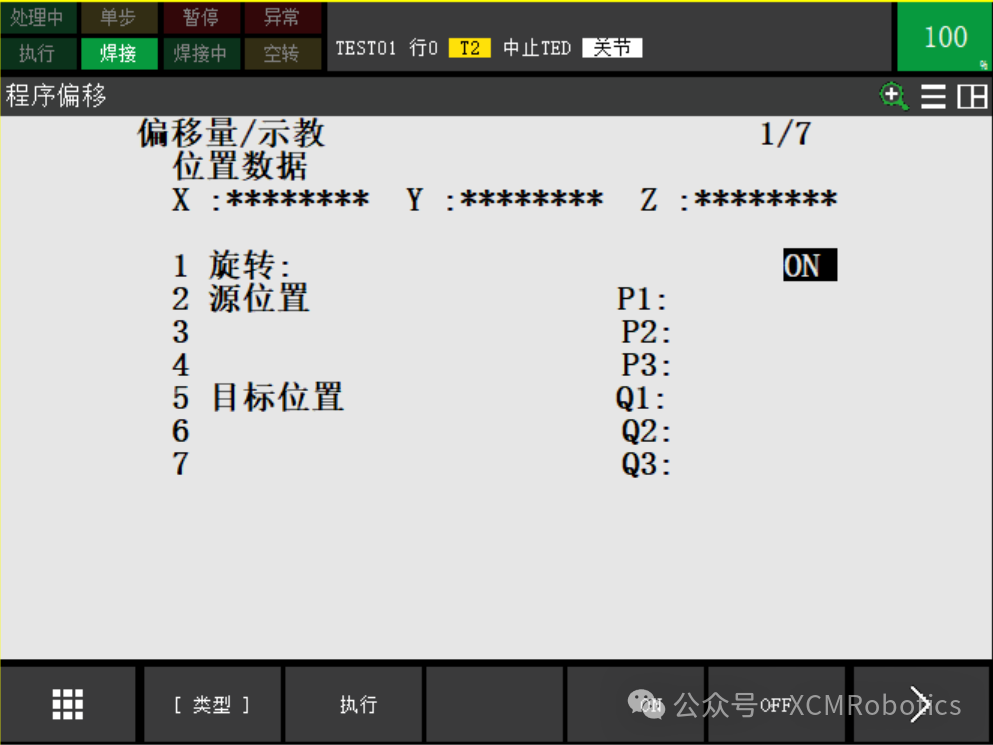
1. Program Name: The name of the program to be offset.
2. Range: The range of the program to be offset, which can be either the whole or a part.
3. Start Line: If the range of the program to be offset is a part, the starting line must be set.
4. End Line: If the range of the program to be offset is a part, the ending line must be set.
5. New Program: The name of the newly generated program after the offset.
6. Insert Line: The line number in the current program where the newly generated program will be inserted after the offset.
7. Rotation: Indicates whether the program to be offset includes a rotation angle; OFF means no rotation, ON means with rotation. If rotation selection is ON, the original and target positions must select three feature points to calculate the rotation angle.
8. Original Position: The feature point position on the original workpiece.
9. Target Position: The feature point position on the workpiece after the offset.
10. Only Robot Axes: The positions of additional axes do not change during the transfer transformation.
11. Action Group: When the source program has multiple action groups, pressing “SHIFT” + “↓” on the program name input screen displays the action group screen. Specify the action group number for the transfer transformation on this screen.
Demonstration of the robot program offset function: