
Abstract
Mobile microrobots can navigate, sense the environment, and interact with it, potentially revolutionizing biomedicine and environmental remediation. Many self-organizing microrobotic collectives have been developed to overcome the inherent limitations of actuation, sensing, and manipulation of individual microrobots; however, reconfigurable collectives with robust transitions between behaviors are rare. Such multifunctional systems are advantageous for operation in complex environments. A recent study published in Nature Communications proposed a multifunctional microrobotic collective system capable of on-demand reconfiguration to adapt to and utilize its environment, performing various functions at the air-water interface. The system demonstrates various modes ranging from isotropic to anisotropic behaviors, as well as transitions between globally driven and self-propelling behaviors. Researchers showcased transitions between different modes in experiments and simulations, demonstrating functionalities such as navigation, object transportation, and interaction with the environment. This versatile microrobotic collective with globally driven and autonomous behaviors holds significant potential for future medical and environmental applications.
Research Areas: Self-organization, Collective Robotics

Hu Cong | Author
Deng Yixue | Editor

Paper Title:
Microrobot collectives with reconfigurable morphologies, behaviors, and functions
Paper Link:
https://www.nature.com/articles/s41467-022-29882-5#Abs1
1. Microrobotic Collectives
1. Microrobotic Collectives
In nature, collective species can often alter their group morphology to adapt to their environment and perform complex functions, such as bees, ants, and flocks of birds. Inspired by these species, engineers have designed programmable collective robots to interact with the environment for robust behavioral reconfiguration.
Behavioral reconfiguration of macroscopic collective robots is relatively common, with drone swarms being one example. However, behavioral reconfiguration of micrometer-scale collective robots is rare, despite their potential in biomedicine and environmental remediation. At the microscopic scale, there are mainly two ways to achieve behavioral reconfiguration: global driven responses induced by external environmental stimuli (physical and chemical interactions) and self-driven responses by active particles. Self-driven refers to individuals reacting to nearby behaviors, while global driven refers to the system’s response to external stimuli such as sound, light, and magnetic fields. Among these, magnetic field stimulation is widely used, such as the magnetic-controlled soft robots invented by Professor Zhao Xuanhe from MIT, which can be used to remove blood clots.
Many studies on magnetic-controlled microrobotic collectives have been conducted, but they either exhibit a single behavioral pattern or cannot achieve robust transitions between different modes. An ideal system should be able to dynamically plan interactions between particles and the environment using external control parameters (such as magnetic field frequency) and freely transition between several modes and their functions.
A recent study published in Nature Communications proposed a microrobotic collective system composed of approximately 120 micro-discs at the fluid-air interface. The system demonstrates six behavioral modes controlled by magnetic fields and self-propulsion, and can combine different modes to achieve various functions, such as path planning and object transportation. The micro-disc collective robots are highly suitable for practical applications and can be expanded into three-dimensional space for medical treatments, such as active drug transportation.
Write the letters MPIC in a chain pattern
Contact transportation of small balls through static, rotating, and chain modes
2. Six Different Behavioral Modes
2. Six Different Behavioral Modes
All collective behavioral modes in this study are generated by the magnetic micro-disc collective at the air-water interface, driven by a globally time-varying uniform magnetic field. Different magnetic field structures place the collective in six behavioral modes: static, rotating, oscillating, chain, oscillating chain, and gas-like modes with self-propelling pairs. Besides the control of the magnetic field, interactions also occur between particles and between particles and the environment (e.g., fluid dynamics, dipole interactions, and surface tension). The system exhibits isotropic and anisotropic behaviors and can transition between different behavioral modes (e.g., from globally driven mode to self-driven).
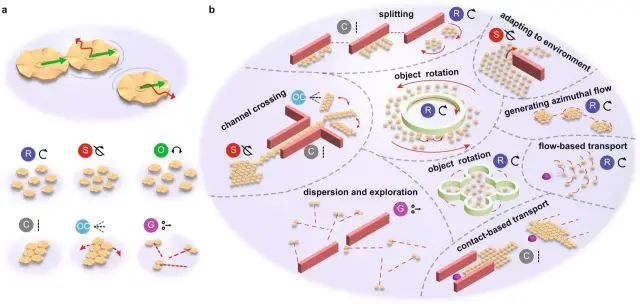
Figure 1. Reconfigurable behaviors and functions of microrobotic collectives. (a) The forces exerted by three micro-discs driven by an external magnetic field (above). Six modes: rotating R, static S, oscillating O, chain C, oscillating chain OC, and gas-like mode G with self-propelling pairs (below). (b) Transitioning between collective modes to execute various functions.
(1) Rotating Mode R
Each micro-disc rotates around its axis at the same angular velocity as the external magnetic field. Each rotating micro-disc generates an azimuthal flow field, allowing the collective to operate around a common center of mass. The rotation speed of each disc and the hydrodynamic repulsive force between discs increase with the frequency.
(2) Static Mode S
In this mode, the center of mass of each disc remains static relative to a global reference frame, while the discs oscillate around their center axis. The micro-discs change their oscillation direction and angular velocity over time, oscillating at a fixed position and interacting with adjacent micro-discs through time-varying pair interactions, which temporarily offsets any fluid motion, keeping the collective static.
(3) Oscillating Mode O
The discs maintain a constant rotation direction for a short time, but the angular velocity fluctuates. The driving signal can periodically switch the entire collective between clockwise and counterclockwise rotations at a time-varying angular speed. The key difference between static and oscillating modes is that the period of oscillating mode is much longer. This results in uniform rotation in one direction during short observations, while the average long-term angular velocity of this mode remains lower than that of the rotating mode.
(4) Chain Mode C
The formation of a chain structure results from the synchronized oscillation of micro-discs throughout the collective, the flow generated by each disc, and the influence of this flow on neighboring components. Although it may seem intuitive to create chains using static magnetic fields, this system requires an oscillating magnetic field.
(5) Gas-like Mode GaSPP
The micro-discs translate perpendicular to the line connecting their respective centers. Their translational speed increases with frequency, and once a pair of micro-discs collides with a boundary or another micro-disc, the translational speed drops to zero. At this point, the micro-discs can either separate permanently or temporarily; or they can rejoin with other micro-discs as a pair, translating in a new direction.
The realization of these behavioral modes is achieved through different magnetic field patterns, such as producing a rotating mode when the magnetic field trajectory is circular and a static mode when the trajectory is parabolic, as shown in Figure 2.
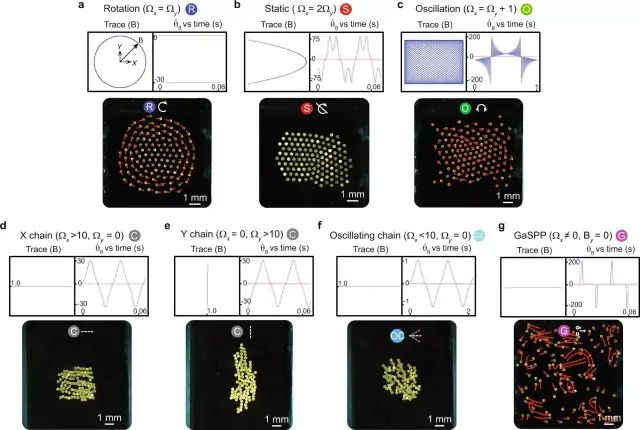
Figure 2. Demonstration of six different collective behaviors. a-g represent rotating R, static S, oscillating O, chain C (in the X and Y directions), oscillating chain OC, and gas-like mode G with self-propelling pairs. The direction of the magnetic field vector is Trace(B), and the partial derivative of the magnetic field vector relative to the x-axis is  .(The symbols above the experimental images in (a-g) represent the modes exhibited by the collective. These symbols correspond to those shown in Figure 1a.)Ωx andΩy are the oscillation frequencies of the external magnetic field along the x and y axes respectively.
.(The symbols above the experimental images in (a-g) represent the modes exhibited by the collective. These symbols correspond to those shown in Figure 1a.)Ωx andΩy are the oscillation frequencies of the external magnetic field along the x and y axes respectively.
The mode transitions are demonstrated through simulations and experiments. The collective transitions from rotating mode to static mode, then to oscillating mode, and subsequently from isotropic oscillating mode to anisotropic Y-chain. The Y-chain transforms into an X-chain by changing the magnetic field direction, after which the collective switches to an oscillating chain, where each chain oscillates around the X-axis, followed by a transition from the globally driven oscillating chain to the self-propelling gas-like mode, where micro-discs disperse through the GaSPP mode and transition to the rotating mode at higher frequencies. Finally, the collective collapses towards the center through the static mode, forming a fixed hexagonal structure.
3. Functional Demonstrations Using Different Behavioral Modes
3. Functional Demonstrations Using Different Behavioral Modes
This study demonstrated a rich set of functionalities using different collective modes. These demonstrations enable the micro-disc collective to perform collective movement and navigation in complex environments through variations in the magnetic field gradient, and achieve contact-based object transfer, non-contact object transportation, path planning and obstacle avoidance, and object rotation. These demonstrations showcase the ability of the collective to manipulate itself and its surrounding environment through fluid media, including motion induced by flow, object transportation, object rotation, and direction control.
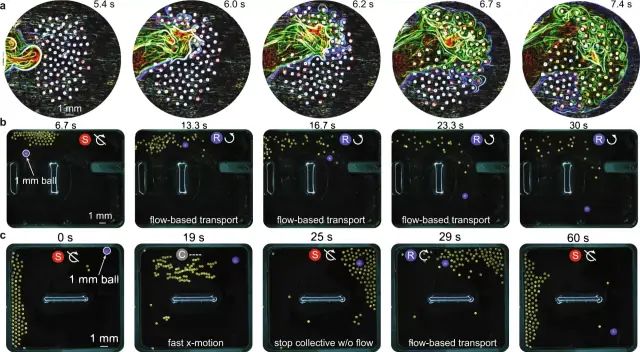
Figure 3. Fluid-assisted non-contact object transportation (a) Qualitative demonstration of flow around the micro-discs during collective rotation. The green and blue lines are extracted using edge detection. (b) The collective rotates and guides a purple ball to the lower right corner. (c) The collective rotates and guides a ball around the perimeter of the field using field design. (Sub-images in (b, c) indicate the functions performed by the collective.)
In Figure 3a, a fluorescent dye was introduced to the left side of the clockwise rotating collective and transported through its diffusion and the azimuthal flow generated by the collective. Upon close observation, it can be seen that the dye rotates around the edge of a single micro-disc and is swept onto other nearby micro-discs by the azimuthal flow. Non-contact object transfer is achieved through the rotating mode. Figure 3b shows the collective moving a polystyrene ball (1 mm) from the top center of the field to the lower right corner through rotation. The collective rotates counterclockwise, generating a flow field that moves the ball, thereby transporting it to the lower right corner of the field. Figure 3c uses the chain mode to also move the ball to the lower right corner through non-contact transportation. It has been demonstrated that the collective can transport large spherical objects through both contact-based and non-contact mechanisms.
In summary, this micro-disc collective robotic system generates six behavioral modes through adjustable magnetic fields. The system can freely transition between different behaviors, and through combinations of these behavioral modes, complex functions can be achieved, such as non-contact and contact-based object transportation, path planning, and obstacle avoidance, presenting vast potential for biomedical and environmental remediation applications.
Paper Abstract
Latest Papers in Complex Science
Since the launch of the Collective Intelligence top journal paper delivery column, it has continuously collected the latest papers from top journals such as Nature and Science, tracking cutting-edge advances in complex systems, network science, computational social science, and more. Now officially launching a subscription feature, sending paper information weekly through the WeChat service account “Collective Intelligence”. Scan the QR code below for one-click subscription:
Recommended Reading
-
Long Review: The Past, Present, and Future of Collective Robotics -
What are the Applications of Collective Robotics? | Collective Intelligence Encyclopedia -
PRL Express: Robot Simulation of Collective Behavior Emergence of Active Matter -
“Zhangjiang: 27 Lectures on Complex Science” is now fully online! -
Become a Collective Intelligence VIP, unlocking all courses/book clubs on the site -
Join Collective Intelligence and explore complexity together!
Click “Read the Original” to track top journal papers in complex science