A Dual-Shoulder Backpack
How Difficult Is It?
Give It a Try!
→_→

Abstract: Node localization is one of the key technologies in wireless sensor networks, widely applied in military and civilian fields. This paper discusses the current state of localization technologies in wireless sensor networks both domestically and internationally, conducting a survey of node localization techniques, elaborating on anchor node/non-anchor node localization, centralized/distributed localization, and ranging/non-ranging localization algorithms. Various algorithms are compared from the perspectives of localization accuracy, scale, power consumption, etc. The focus is on the RSSI-based centroid localization algorithm, which is simulated, showing a significant improvement in localization accuracy.
0 Introduction
The Chongqing Municipal Education Commission Science and Technology Research Project (KJ1500917) Wireless Sensor Network (WSN) consists of a large number of micro-sensor nodes with data acquisition capabilities, wireless communication capabilities, and data processing capabilities. Thousands of micro-sensor nodes are placed in the monitored area, allowing nodes to communicate with each other, forming a network that transmits data wirelessly. By leveraging the collaborative sensing or monitoring of external changes among nodes, the collected information is pre-processed and then sent to users through a base station.
WSNs utilize their information acquisition and processing technologies in various fields such as target reconnaissance, tracking, monitoring, and positioning. For example, military reconnaissance, ecological environment monitoring, target positioning, target tracking, special patient monitoring and rescue, and child location monitoring and rescue. The identification, tracking, or positioning of target locations in wireless sensor networks refers to establishing a map similar to GPS satellite positioning through the physical coordinates of nodes in the distributed area.
1 Localization Technology
In WSNs, nodes send information to surrounding neighbor nodes and must determine their own positions. Due to the large distribution and scale of nodes in the network, querying node positions through a central base station cannot be completed in a short time. The hardware configuration of sensor nodes in WSNs is relatively low, and traditional GPS is not suitable for WSN localization applications due to high user costs. Therefore, the data sent by nodes must include their own coordinate information. Additionally, node localization in WSNs involves localization accuracy, node scale, fault tolerance, robustness, energy consumption, etc. Balancing localization accuracy is key to wireless sensor network positioning. There are many types of localization technologies; this paper elaborates on anchor node/non-anchor node, centralized/distributed, and ranging/non-ranging aspects.
1.1 Anchor Node Algorithm / Non-Anchor Node Algorithm
The anchor node localization method uses anchor nodes as reference nodes. First, it estimates the distance between the unknown node and the anchor node and selects different operators for initializing the coordinates of the unknown node. Finally, it optimizes the position of the initially unknown node. The higher the density of anchor nodes, the more reference nodes there are, leading to more precise localization. However, increasing the number of nodes can lead to increased system costs.
The non-anchor node algorithm requires creating a mapping to estimate the distance between measurement nodes through the mapping relationships among nodes. Different mapping relationships will yield different precision. Sometimes mapping relationships are created through rotation, flipping, or translation. The algorithm proposed by NISSanka and others is a localization method that does not require anchor nodes; it establishes a mapping relationship through multi-hop communication to obtain the coordinates of each node in the coordinate system, and finally uses a mass-spring model for iterative optimization.
1.2 Centralized Algorithm and Distributed Algorithm
Centralized localization algorithms: Localization information is transmitted to a central base station, where localization calculations are performed. Centralized computation starts from a global perspective, and the computation and storage capacity are almost unlimited, achieving real-time localization. However, since only one base station is responsible for the computation, this leads to significant communication and storage consumption, ultimately depleting energy and making long-term real-time localization impossible.
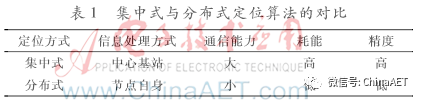
Distributed localization algorithms: This algorithm corresponds to the centralized localization algorithm, using communication among nodes to autonomously compute and estimate the coordinates of node positions. A comparison between centralized and distributed localization algorithms is shown in Table 1.
1.3 Ranging / Non-Ranging Localization
1.3.1 Ranging-Based Localization Algorithms
These localization algorithms determine positioning by measuring the distance or angle between nodes. Sensors estimate the distance between nodes. Common ranging-based localization algorithms include Received Signal Strength Indicator (RSSI), Time of Arrival (TOA), Angle of Arrival (AOA), and Time Difference of Arrival (TDOA).
(1) Received Signal Strength Algorithm (RSSI): This method determines the distance based on the Received Signal Strength (RSSI) and has high requirements for communication channel parameters. By knowing the transmission power of the signal and the signal power received by the node, the distance between nodes can be measured. The specific formula for the signal strength from node A to B is as follows:

Where Pr is the received signal strength at node B, Pt is the transmission power, Gt and Gr are the antenna gains of A and B respectively, λ is the wavelength, R is the distance, and L is the loss factor. As signal propagation is affected by distance and obstacles, the signal power strength attenuates, indirectly affecting accuracy. Therefore, good accuracy can be achieved for short-distance communication.
(2) Time of Arrival Method (TOA): TOA, also known as Time of Flight (TOF). This method requires clock synchronization between nodes. The mobile terminal sends a measurement signal to the base station, and specific algorithm calculations can achieve the positioning of the mobile terminal. The distance can be calculated using the following formula:

Where d is the distance between nodes, c is the propagation speed, and Δt is the time interval.
(3) Angle of Arrival Method (AOA): AOA measures the angle between the transmitting and receiving ends to obtain node location information and complete positioning. The measurement angle is obtained through an antenna array installed on the node, using appropriate triangulation algorithms. Since the AOA method requires antenna arrays to be installed at both the receiving and transmitting ends, the cost and energy consumption issues increase, making the practicality of AOA relatively poor.
(4) Time Difference of Arrival Method (TDOA): The TDOA method measures distance based on the time interval at which two waves reach the same target or different targets. The distance formula for nodes is as follows:

Where d is the distance between nodes, and Δt is the reception time interval, S=(C1×C2)/(C1−C2), where C1 and C2 are the propagation speeds of two waves.
For different ranging methods, the localization algorithm needs to be selected based on accuracy requirements, as shown in Table 2 comparing the accuracy of different ranging localization algorithms.

1.3.2 Non-Ranging Technology Algorithms
These algorithms do not require positioning based on the communication distance between nodes. Since information can be sent via multi-hop, the communication distance between two nodes can be estimated using the number of hops information, and the algorithm can then determine the coordinates of the unknown node. This algorithm has low power consumption and cost as its advantages, but low localization accuracy as its disadvantage. Common methods include DV-Hop and Centroid Location (CL).
(1) DV-Hop: The DV-Hop algorithm is a distance vector-based hop count algorithm. It generally involves three steps: (1) calculating the minimum hop count between nodes; (2) each anchor node calculates its average hop distance; (3) estimating the coordinates of the unknown node using trilateration, maximum likelihood, or least squares methods.
(2) Centroid Algorithm (CL): The centroid algorithm is based on the connectivity of the network, using the anchor nodes surrounding the unknown node as the geometric centroid. Every cycle, it sends the coordinates of anchor nodes to neighboring nodes, and the unknown node is ultimately determined as the relative geometric centroid that forms the polygon. If the coordinates of the anchor nodes connected to the unknown node are (x1,y1)(x2,y2)…(xn,yn), the centroid (x,y) of the polygon formed by n anchor nodes is:

This centroid localization algorithm is simpler than the weighted centroid algorithm and trilateration method but has a higher position error rate.
2 RSSI-Based Centroid Localization Algorithm
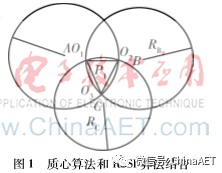
The traditional centroid localization algorithm is simple and feasible but has low localization accuracy, often failing to locate the target. To improve localization accuracy, an RSSI-based centroid localization algorithm is proposed, combining the centroid algorithm with RSSI. By converting the RSSI signal strength into transmission distance, localization accuracy can be improved. That is, after the neighboring nodes receive the information, they record the RSSI values of the anchor nodes, calculate the transmission distance with the anchor node as the center, and record all intersection nodes of circles with the transmission distance as the radius. Using the centroid algorithm on the intersection points, the coordinates of the unknown node can be estimated. As shown in Figure 1, A, B, and C are anchor nodes, and the unknown node P1 must fall within triangle O1O2O3. Further simulations validate this algorithm.
3 Simulation Verification
The experimental environment uses MATLAB 2010b simulation software, with 30 unknown nodes randomly distributed in a 100 m × 100 m area, taking the average error value and comparing the errors of the centroid localization algorithm, RSSI localization algorithm, and RSSI-based centroid localization algorithm. The simulation results are shown in Figure 2.
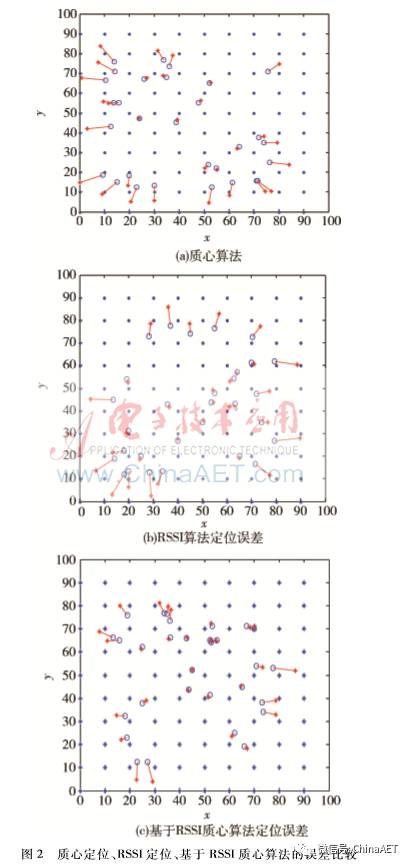
In Figure 2, the solid points are anchor nodes, the asterisks are unknown nodes, the circles are estimated positions by the algorithm, and the lines indicate positioning errors. The results show that both the centroid algorithm and RSSI localization algorithm have average characteristics in estimating the position of unknown nodes, while the RSSI-based centroid localization algorithm significantly improves the positioning effect for unknown nodes.
Changing the communication radius, the error comparison between the RSSI centroid and centroid localization algorithms at different communication radii is shown in Figure 3.
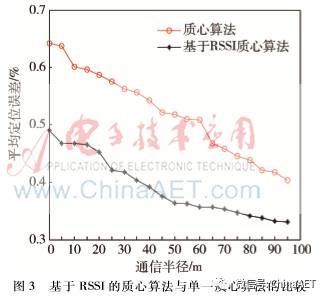
The simulation results indicate that the RSSI centroid localization optimization algorithm has smaller errors than the ordinary centroid localization algorithm, and as the communication distance increases, the positioning error gradually decreases, stabilizing after reaching a certain communication radius. If the unknown mobile node is closer to the reference node, the more anchor nodes there are, the smaller the result error.
4 Conclusion
With the development of localization technology, the trend of affordable wireless positioning services for the public intensifies. Simulations of the RSSI-based centroid localization algorithm show that its localization accuracy is higher than that of traditional centroid algorithms, and it features low cost, fewer devices, long distances, and ease of acquisition. This algorithm essentially meets the high-precision localization requirements and is suitable for wireless positioning systems with relatively high positioning accuracy and transmission efficiency. Currently, many algorithms only suit specific environments or require strict conditions, and numerous issues remain unresolved, such as energy consumption, network security, ranging interference, localization optimization, and 3D localization issues. Therefore, it is essential to choose appropriate localization algorithms based on different localization needs and environments.
References
[1] Qiu Yan, Zhao Chongchong, Dai Guilan. Research on Node Localization Technology in Wireless Sensor Networks. Computer Science, 2008, 35(5): 47-50.
[2] KOTWAL S B, VERMA S, ABROL R K. Approaches of self-localization in wireless sensor networks and directions in 3D. International Journal of Computer Applications, 2012, 50(11):1-10.
[3] YAN L Q,GIANNAKIS G B. Ultra wide band communications: an idea whose time has come. IEEE Signal Processing Magazine, 2005, 21(6):26-54.
[4] Peng Bao. Research on Mobile Node Localization and Security Localization Technology in Wireless Sensor Networks. Harbin: Harbin Institute of Technology, 2009.
[5] PRIYANTHA N B, BALAKRISHNAN H, DEMAINE E, et al. Anchor-free distributed localization in sensor networks. Proceedings of the 1st International Conference on Embedded Networked Sensor Systems. ACM, 2003: 340-341.
[6] Tu Qiaoling, Mu Xiaoyan, Song Jia. An Improved DV-Hop Algorithm. Journal of Chongqing University of Technology (Natural Science), 2014, 28(11):84-88.
[7] Sun Limin. Wireless Sensor Networks. Beijing: Tsinghua University Press, 2005.
[8] Xu Lin, Fu Chenghua. Research and Improvement of Error in Triangulation Algorithm Based on Zigbee. Microcomputer and Applications, 2012, 31(21):68-70.