1 Overview

This is a compatibility layer for the RT-Thread domestic operating system, designed to allow projects based on the μC/OS-II operating system from the American company Micriμm to migrate quickly and seamlessly to the RT-Thread operating system. The design and implementation of the compatibility layer respect the original μC/OS-II, ensuring its authenticity.
The design and implementation of the uCOS-II compatibility layer incorporate experience from the uCOS-III compatibility layer, while cross-checking with the uCOS-III compatibility layer to ensure the reliability of both layers.
Supported versions: All versions of μC/OS-II from 2.00 to 2.93
1.1 Other RTOS Compatibility Layers for RT-Thread
1.2 This Compatibility Layer is Suitable for
-
Those who have previously learned the μC/OS-II operating system and intend to switch to learning the RT-Thread domestic operating system. This compatibility layer can help you quickly run your project using your existing μC/OS-II programming experience and habits, while gradually becoming familiar with the RT-Thread API functions over time, thus lowering your learning threshold and time cost.With this compatibility layer, unfamiliarity with RT-Thread API and programming style will no longer hinder your learning of RT-Thread!
-
Existing task (thread) modules written in μC/OS-II that need to be used in RT-Thread-based projects -
Old projects that need to migrate from μC/OS-II to RT-Thread -
When rapid product development based on RT-Thread is needed, but engineers have only used μC/OS and have no experience with RT-Thread development. This compatibility layer can help engineers quickly develop products based on their μC/OS-II experience, simplifying software reuse and shortening the learning process for new microcontroller developers, thereby reducing time to market for new devices. -
Avoiding errors caused by fixed thinking due to μC/OS-II programming experience when migrating to RT-Thread, as these errors are often difficult to detect
For example:
Different parameters for software timer
Different data types for task stack
1.3 Version Details

1.4 Official Website
RT-Thread:
https://www.rt-thread.org/
Documentation Center:
https://www.rt-thread.org/document/site/tutorial/nano/an0038-nano-introduction/
μC/OS-II:
https://www.micrium.com/ Documentation Center:
https://doc.micrium.com/pages/viewpage.action?pageId=10753158
2 Usage
2.1 Keil-MDK Simulation Project
This simulation project is based on the STM32F103 platform.
Keil project path: rt-thread-3.1.3/bsp/stm32f103/Project.uvprojx
Make sure to install the RT-Thread Nano-3.1.3 Keil support package in advance.
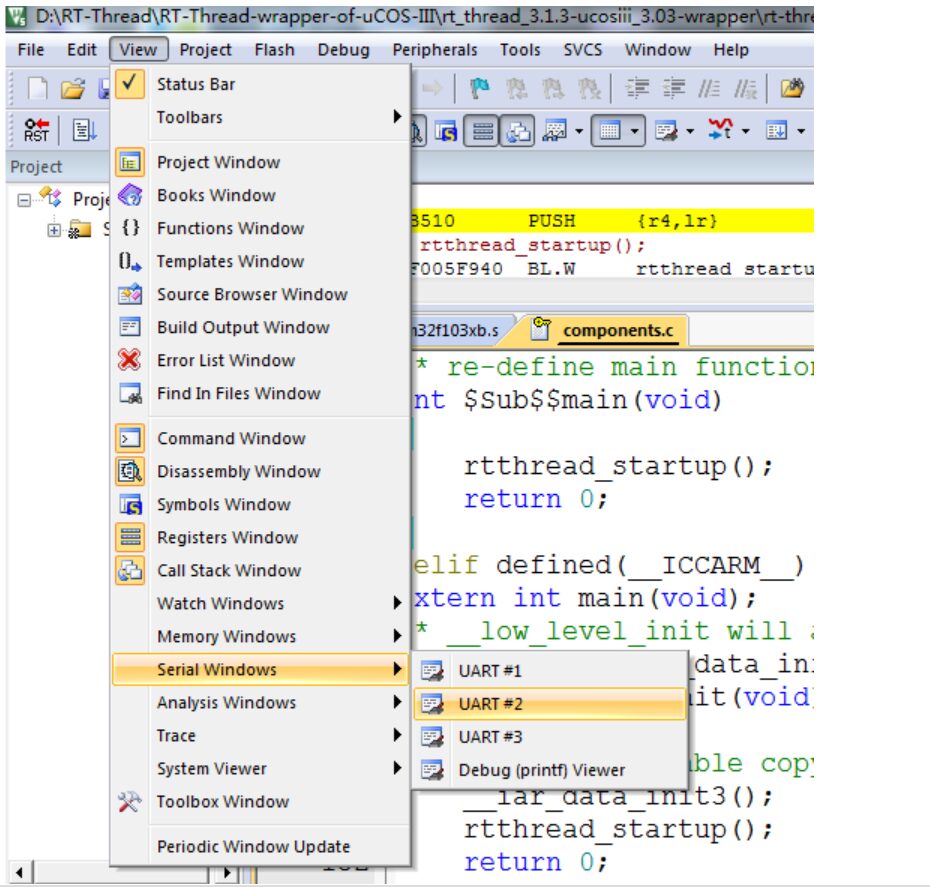
Note: The debugging serial port used is USART2, not USART1
2.2 Migration Steps
-
Add all files from the uCOS-II folder to your project, keeping the original folder structure if possible. Compared to the original μC/OS-II, the file <span>os_rtwrap.c</span>has been added, which is responsible for supporting the conversion between RT-Thread and μC/OS-II. -
Configure <span>os_cfg.h</span>Each option’s configuration description is consistent with the original μC/OS-II; if there are differences, I have explained them in the comments. Original μC/OS-II configuration descriptions can be found in: a) “Embedded Real-Time Operating System μC/OS-II (Second Edition)” Beijing Aerospace University Press, translated by Shao Beibei et al. b) Micriμm company μCOS-II online documentation -
The original μCOS-II timer callback function is called in the timer thread, not in an interrupt; therefore, to use the software timer of the μCOS-II compatibility layer, you need to set the macro definition in rtconfig.h <span>RT_USING_TIMER_SOFT</span>to 1. -
Since the compatibility layer uses the memory allocation method provided by the RT-Thread kernel, it eliminates the need to configure the task and the size of memory pools for each kernel object in the original μC/OS-II, thus requiring the definition of <span>RT_USING_MEMHEAP</span>in rtconfig.h.
2.3 os_cfg.h Configuration File
1#define OS_TMR_CFG_TICKS_PER_SEC 10u /* Rate at which timer management task runs (Hz) */
<span>OS_TMR</span> structure’s<span>.OSTmrMatch</span> member variable’s value is calculated based on OS Ticks frequency.2.4 Running
2.4.2 Automatic Initialization Process
<span>PKG_USING_UCOSII_WRAPPER_AUTOINIT</span> in the<span>rtconfig.h</span> file. Please refer to [4.2.1 section](#4.2.1 Enable uCOS-II wrapper automatically init) (unless otherwise specified, it is recommended to use this method).2.5 Notes
<span>sizeof(CPU_STK)</span>, while the thread stack size of RT-Thread is measured in<span>sizeof(rt_uint8_t)</span><span>, although the compatibility layer has made the conversion, it is crucial to ensure that all API calls and macro definitions related to μCOS-II adhere to μCOS-II standards, i.e., the stack size is</span><code><span>sizeof(CPU_STK)</span><span><span>, </span><strong>do not mix types</strong><span>! Such errors are extremely subtle and must be noted!</span></span> 1ALIGN(RT_ALIGN_SIZE)
2static rt_uint8_t thread2_stack[1024];//Error: Mixing RT-Thread data type with thread stack
3
4OSTaskCreateExt(task,
5 0,
6 &task_stack[TASK_SIZE-1],
7 TASK_PRIO,
8 0,
9 &task_stack[0],
10 sizeof(thread2_stack),//Task stack size (Error: this parameter is in sizeof(CPU_STK))
11 0,
12 OS_TASK_OPT_STK_CHK|OS_TASK_OPT_STK_CLR);
Below is the correct way:
1#define THREAD_STACK_SIZE 256 //Correct, stack size defined separately using macro, unit is sizeof(CPU_STK)
2ALIGN(RT_ALIGN_SIZE)
3 static CPU_STK thread2_stack[THREAD_STACK_SIZE];//Correct, using μCOS-II's own data type to define task stack
4
5OSTaskCreateExt(task,
6 0,
7 &task_stack[TASK_SIZE-1],
8 TASK_PRIO,
9 0,
10 &task_stack[0],
11 THREAD_STACK_SIZE,//Task stack size (Correct)
12 0,
13 OS_TASK_OPT_STK_CHK|OS_TASK_OPT_STK_CLR);
3 Interfaces
3.1 New APIs Added
<span>OSMutexCreateEx()</span><span> function, which is not present in the original μCOS-II functions. The first parameter of</span><code><span>OSMutexCreate()</span><span> in the compatibility layer has no significance and is thus omitted for user convenience. This is because the implementation of μCOS-II is outdated and does not support the same task at the same priority. Users are recommended to use this API:</span>1OS_EVENT *OSMutexCreateEx (INT8U *perr);
<span>OSQCreateEx()</span><span> function, which is not present in the original μCOS-II functions. The first parameter of</span><code><span>OSQCreateEx()</span><span> in the compatibility layer has no significance and is thus omitted for user convenience. Users are recommended to use this API:</span>1OS_EVENT *OSQCreateEx (INT16U size);
3.2 APIs Not Implemented (Only 2)
1INT8U OSTaskCreate (void (*task)(void *p_arg),
2 void *p_arg,
3 OS_STK *ptos,
4 INT8U prio);
5
6INT16U OSEventPendMulti (OS_EVENT **pevents_pend,
7 OS_EVENT **pevents_rdy,
8 void **pmsgs_rdy,
9 INT32U timeout,
10 INT8U *perr);
3.3 Hook Functions
<span>OSTaskDelHook</span><span> function, it will only be called when the OSTaskDel function is invoked, and not when the</span><code><span>rt_thread_detach</span><span> function is called (this is handled by RTT's hook functions). This is to maintain clarity and prevent the μCOS-II compatibility layer from interfering with RT-Thread internal affairs.</span><span>os_cpu_c.c</span> and <span>app_hooks.c</span><code> . Following μCOS-II's philosophy,<code><span>os_cpu_c.c</span> provides the original hook functions (i.e., these hook functions are called directly by the respective functions), and this file, along with its internal hook functions, is intended for use by porting engineers; application engineers should not modify the content of this file. The hook functions in the<span>os_cpu_c.c</span> file provide function pointers for the hook functions in the<span>app_hooks.c</span> file to register and use, which can be manipulated by application engineers. In other words, any functions that need to be called in the hook functions should be placed in the<span>app_hooks.c</span> file.1void OSTaskReturnHook (OS_TCB *p_tcb);
2void OSTaskSwHook (void);
3void OSTimeTickHook (void);
At the same time, the corresponding application-level hook functions for the above hook functions have also been canceled:
1void App_TaskReturnHook (OS_TCB *p_tcb);
2void App_TaskSwHook (void);
3void App_TimeTickHook (void);
3.4 Statistical Task (OS_TaskStat())
<span>OS_TASK_STAT_EN</span><span> macro. It can perform statistical tasks during system runtime. The CPU utilization is represented as an integer between 0-100 (corresponding to 0% - 100%).</span>OSCPUUsage global variable to obtain the current CPU usage, which is calculated in the same way as the original μCOS-II.3.5 Task Control Blocks, Kernel Object Control Blocks (Structures)
<span>OS_TCB</span> structure are as follows, showing that it includes most member variables of the original version. If you do not need to maintain compatibility with the original member variables, you can define the macro<span>PKG_USING_UCOSII_WRAPPER_TINY</span>, which will significantly reduce the<span>OS_TCB</span> structure. You can also disable<span>OS_TASK_PROFILE_EN</span>, <span>OS_TASK_NAME_EN</span>, <span>OS_CFG_TASK_REG_TBL_SIZE</span> to further trim. 1typedef struct os_tcb {
2 struct rt_thread OSTask;
3 OS_STK *OSTCBStkPtr; /* Pointer to current top of stack */
4
5#if OS_TASK_CREATE_EXT_EN > 0u
6 void *OSTCBExtPtr; /* Pointer to user definable data for TCB extension */
7 OS_STK *OSTCBStkBottom; /* Pointer to bottom of stack */
8 INT32U OSTCBStkSize; /* Size of task stack (in number of stack elements) */
9 INT16U OSTCBOpt; /* Task options as passed by OSTaskCreateExt() */
10 INT16U OSTCBId; /* Task ID (0..65535) */
11#endif
12
13 struct os_tcb *OSTCBNext; /* Pointer to next TCB in the TCB list */
14 struct os_tcb *OSTCBPrev; /* Pointer to previous TCB in the TCB list */
15
16#if OS_TASK_CREATE_EXT_EN > 0u
17#if defined(OS_TLS_TBL_SIZE) && (OS_TLS_TBL_SIZE > 0u)
18 OS_TLS OSTCBTLSTbl[OS_TLS_TBL_SIZE];
19#endif
20#endif
21
22#ifndef PKG_USING_UCOSII_WRAPPER_TINY
23#if (OS_EVENT_EN)
24 OS_EVENT *OSTCBEventPtr; /* Pointer to event control block */
25#endif
26#if (OS_FLAG_EN > 0u)
27 OS_FLAGS OSTCBFlagsRdy; /* Event flags that made task ready to run */
28#endif
29 INT32U OSTCBDly; /* Nbr ticks to delay task or, timeout waiting for event */
30#endif
31 INT8U OSTCBStat; /* Task status */
32 INT8U OSTCBStatPend; /* Task PEND status */
33 INT8U OSTCBPrio; /* Task priority (0 == highest) */
34
35#if OS_TASK_DEL_EN > 0u
36 INT8U OSTCBDelReq; /* Indicates whether a task needs to delete itself */
37#endif
38
39#if OS_TASK_PROFILE_EN > 0u
40 OS_STK *OSTCBStkBase; /* Pointer to the beginning of the task stack */
41 INT32U OSTCBStkUsed; /* Number of bytes used from the stack */
42#endif
43
44#if OS_TASK_NAME_EN > 0u
45 INT8U *OSTCBTaskName;
46#endif
47
48#if OS_TASK_REG_TBL_SIZE > 0u
49 INT32U OSTCBRegTbl[OS_TASK_REG_TBL_SIZE];
50#endif
51} OS_TCB;
3.6 Global Variables
<span>ucos_ii.h</span><span>). The specific meanings of these global variables can be found in the reference materials listed in [2.2 section](#2.2 迁移步骤).</span> 1#if OS_TASK_STAT_EN > 0u
2OS_EXT INT8U OSCPUUsage; /* Percentage of CPU used */
3OS_EXT INT32U OSIdleCtrMax; /* Max. value that idle ctr can take in 1 sec. */
4OS_EXT INT32U OSIdleCtrRun; /* Val. reached by idle ctr at run time in 1 sec. */
5OS_EXT BOOLEAN OSStatRdy; /* Flag indicating that the statistic task is rdy */
6OS_EXT OS_STK OSTaskStatStk[OS_TASK_STAT_STK_SIZE]; /* Statistics task stack */
7#endif
8
9#define OSIntNesting rt_interrupt_get_nest() /* Interrupt nesting level */
10
11#define OSLockNesting rt_critical_level() /* Multitasking lock nesting level */
12
13#define OSPrioCur rt_thread_self()->current_priority /* Priority of current task */
14
15OS_EXT BOOLEAN OSRunning; /* Flag indicating that kernel is running */
16
17OS_EXT INT8U OSTaskCtr; /* Number of tasks created */
18
19#if OS_TASK_STAT_EN > 0u
20OS_EXT volatile INT32U OSIdleCtr; /* Idle counter */
21#endif
22
23#ifdef OS_SAFETY_CRITICAL_IEC61508
24OS_EXT BOOLEAN OSSafetyCriticalStartFlag;
25#endif
26
27#define OSTCBCur ((OS_TCB*)rt_thread_self()) /* Pointer to currently running TCB */
28OS_EXT OS_TCB *OSTCBFreeList; /* Pointer to list of free TCBs */
29OS_EXT OS_TCB *OSTCBList; /* Pointer to doubly linked list of TCBs */
30OS_EXT OS_TCB *OSTCBPrioTbl[OS_LOWEST_PRIO + 1u]; /* Table of pointers to created TCBs */
31OS_EXT OS_TCB OSTCBTbl[OS_MAX_TASKS + OS_N_SYS_TASKS]; /* Table of TCBs */
32
33#if (OS_MEM_EN > 0u) &&& (OS_MAX_MEM_PART > 0u)
34OS_EXT OS_MEM *OSMemFreeList; /* Pointer to free list of memory partitions */
35OS_EXT OS_MEM OSMemTbl[OS_MAX_MEM_PART];/* Storage for memory partition manager */
36#endif
37
38#if OS_TASK_REG_TBL_SIZE > 0u
39OS_EXT INT8U OSTaskRegNextAvailID; /* Next available Task register ID */
40#endif
41
42#if OS_TIME_GET_SET_EN > 0u
43#define OSTime rt_tick_get() /* Current value of system time (in ticks) */
44#endif
45
46#if OS_TMR_EN > 0u
47#define OSTmrTime rt_tick_get() /* Current timer time */
48#endif
4 Automating Env Tool Configuration into the Project
4.1 Configuration Method
1RT-Thread online packages
2 system packages --->
3 [*] Micrium: Micrium software products porting for RT-Thread --->
4 [*] uCOS-II Wrapper --->
5 [*] Enable uCOS-II wrapper automatically init
6 [*] Enable uCOS-II wrapper tiny mode
7 Version (latest) --->
8
4.2 Optional Function Descriptions
4.2.1 Enable uCOS-II wrapper automatically init
The uCOS-II compatibility layer supports initialization according to the original μCOS-II initialization steps; however, in some cases, users may not want to manually initialize the uCOS-II compatibility layer and wish to run application-level tasks or modules directly. In this case, after defining this macro in<span>rtconfig.h</span><span>, the uCOS-II compatibility layer will be automatically initialized before RT-Thread completes its initialization and enters the main thread, allowing users to focus solely on the application-level tasks of uCOS-II.</span>
If this feature is enabled, the macro<span>PKG_USING_UCOSII_WRAPPER_AUTOINIT</span> will be defined in the<span>rtconfig.h</span> file. The following functions in the<span>os_rtwrap.c</span> file will be enabled and automatically executed during RT-Thread initialization.
If you want to use this feature without using the full version (i.e., the nano version), you can manually add the macro definition<span>PKG_USING_UCOSII_WRAPPER_AUTOINIT</span> in<span>rtconfig.h</span>.
1/**
2 * Automatic initialization
3 * The uCOS-II compatibility layer supports initialization according to the original μCOS-II initialization steps; however, in some cases,
4 * users may not want to manually initialize the uCOS-II compatibility layer and wish to run application-level tasks or modules directly. This
5 * macro definition can be used. After defining this macro in rtconfig.h, the uCOS-II compatibility layer will be automatically initialized
6 * before RT-Thread completes its initialization and enters the main thread, allowing users to focus solely on the application-level tasks of uCOS-II.
7 * The wrapper supports uCOS-II standard startup procedure. Alternatively,
8 * if you want to run uCOS-II apps directly and ignore the startup procedure,
9 * you can choose this option.
10 */
11#ifdef PKG_USING_UCOSII_WRAPPER_AUTOINIT
12static int rt_ucosii_autoinit(void)
13{
14 OSInit(); /* Initialize the μCOS-II operating system */
15 OSStart(); /* Start running the μCOS-II operating system */
16
17#if OS_TASK_STAT_EN > 0u
18 OSStatInit();
19#endif
20 return 0;
21}
22INIT_PREV_EXPORT(rt_ucosii_autoinit);
23#endif
4.2.2 Enable uCOS-II wrapper tiny mode
<span>PKG_USING_UCOSII_WRAPPER_TINY</span> in the<span>rtconfig.h</span> file. This mode meets basic compatibility requirements for all APIs, and it is recommended to select this option.5 Others
5.1 Contact Information
Maintenance:Meco Man
5.1.2 Personal GitHub Page
https://github.com/mysterywolf/RT-Thread-wrapper-of-uCOS-II

RT-Thread
Making the development of IoT terminals simple and fast, maximizing the value of chips. Apache2.0 license, can be used for free in commercial products without disclosing source code, no potential business risks.
Long press the QR code to follow us