Waterborne Waste Cleanup Robot
ABOUT this NOVEL


Prototype Principle
Defense
(1) Innovation Background
Grain Rain
With the acceleration of modernization in our country, the amount of waste has increased significantly, especially various floating wastes in the water, which are prone to rot and smell, making timely cleanup difficult. This is a tough nut to crack in the field of water environmental protection. Currently, the main method for cleaning water waste in our country is manual collection, which has drawbacks such as limited operational radius, difficulty in waste collection, time-consuming, labor-intensive, and significant safety hazards. Most waterborne waste cleanup equipment used abroad is bulky, expensive, and has high maintenance costs, making direct introduction and promotion difficult. Our country has vast rivers and coastal waters, and the volume of waterborne waste cleanup is enormous. Therefore, there is an urgent need to independently develop economical specialized equipment to achieve automatic cleanup of waterborne waste. Based on the above background, our team applied PVC materials to design a catamaran-type waterborne waste cleanup robot structure, highlighting stability and flexibility; the robot’s control core is independently designed to ensure simple, flexible, and efficient operation. The completed robot can autonomously patrol and clean waterborne waste in a certain area, and can also utilize solar energy for recharging in non-working environments, ensuring long-lasting operation while being energy-efficient and environmentally friendly.
(2) Work Process
Grain Rain
The cleaning mechanism of the waterborne waste cleanup robot mainly consists of a waste collection net box and a net hatch. Before collecting waste, the waterborne waste cleanup robot uses a camera to locate the cleaning target. Upon finding the target, the underwater propeller starts working, allowing the robot to navigate to the target. As it approaches the cleaning target, the waterborne waste cleanup robot automatically opens the net hatch and continues toward the cleaning target, causing the target to fall into the net box, at which point the hatch closes.
(3) Innovation Points of the Work
Grain Rain
1. Utilizing Solar Energy for Energy Efficiency
The waterborne waste cleanup robot primarily uses a 50W solar photovoltaic panel for power supply. The solar panel charges an 11.1V battery when the robot is in a non-working state, while in a working state, the battery supplies power to the robot for operation. The power supply system is equipped with a solar current controller to extend the battery’s lifespan. We have used high-efficiency battery cells with a widened chip, which perform well under low light, achieving a photoelectric conversion rate of up to 21%. Based on multiple experiments, the solar panel can charge a 2500mAh LiPo battery in about 6 hours under normal sunlight. In other words, the waterborne waste cleanup robot can operate for 30 minutes after 6 hours of sunlight exposure in a non-working state.
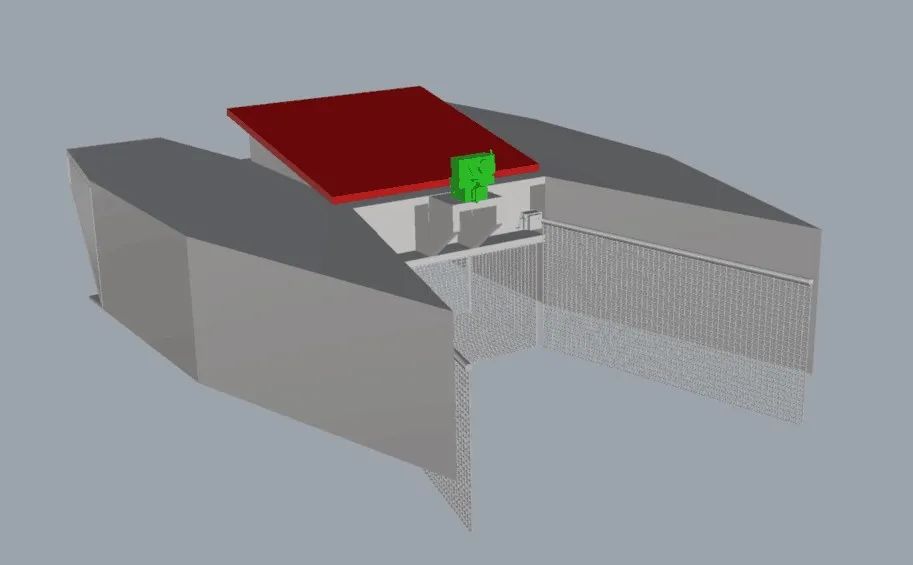
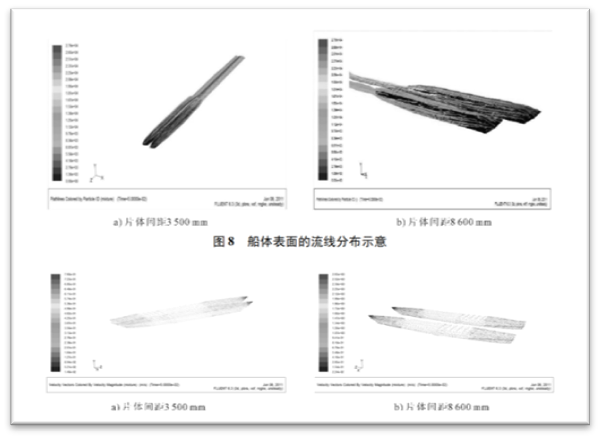
2. Utilizing Catamaran Design for Stable Operation
The main body of the waterborne waste cleanup robot adopts a small water surface catamaran design, providing ample central space for storing floating waste, with a capacity of up to 100L. This increases the utilization of space in the waste collection device, and the underwater propellers are installed at the tail of the submerged body, ensuring uniform flow in the propeller working area, resulting in high propulsion efficiency. When navigating in waves, the waterborne waste cleanup robot exhibits good wave resistance and lateral stability, making it easy to perform cleanup operations on the water. Moreover, the large deck area facilitates the arrangement of solar photovoltaic panels and other equipment, enhancing the overall aesthetics of the waterborne waste cleanup robot.

3. Utilizing Waste Collection Net Box for Flexible Assembly
The waste collection device of the waterborne waste cleanup robot is primarily a net box, where floating waste is stored during the cleanup process. This net box has a simple mechanical structure, making it easy to operate. During actual water operations, when the net box reaches its capacity limit, the waterborne waste cleanup robot can reliably return to shore to replace the net box for waste collection, significantly reducing waste processing time and improving operational efficiency.


4. Utilizing Algorithms for Intelligent Operation
The working modes of the waterborne waste cleanup robot are divided into two types: one is autonomous control in simple environments, and the other is manual control in complex environments. When there is a high density of waste on the water surface, the AT9s remote controller can be used to switch to autonomous mode, allowing the robot to perform large-scale cleanup operations based on path planning and image recognition processing. In situations where there are complex and dense obstacles on the water surface, or when near human activity, manual mode can be switched, utilizing the AT9s remote controller and image transmission equipment for first-person perspective cleanup operations.
5. Using PVC Sheets to Reduce Costs and Enhance Control Flexibility
The main body of the waterborne cleanup robot is made from rigid PVC sheets. PVC sheets are made from PVC and have a honeycomb structure, offering excellent chemical stability and corrosion resistance, as well as high hardness, strength, aging resistance, fire retardancy, reliable insulation, smooth and flat surfaces, water resistance, non-deformation, and ease of processing. The high hardness and strength characteristics provide stability to the robot’s mechanical structure; water resistance and smooth surfaces reduce water surface resistance. PVC sheets are cost-effective and easy to process, facilitating the robot’s production and allowing for cost control and promotion applications.


(4) Hardware Design Principles
Grain Rain
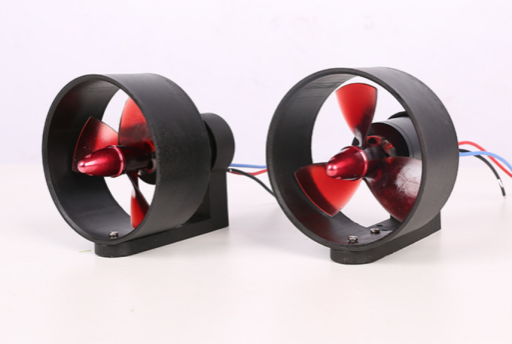
1. Power Propulsion Module
The propulsion device of the waterborne waste cleanup robot uses a pair of 600W underwater propellers that generate 5kg of thrust. The propellers are made from PC resin material, which does not become brittle with long-term use. Each propeller weighs 290g and features a nylon shell and aluminum cover motor, providing excellent waterproof and corrosion resistance, along with effective propulsion. Using a three-phase brushless motor allows for stepless speed adjustment, making the robot flexible in water operations. Multiple water surface rotation experiments indicate that the robot has a turning radius of about 1 meter, providing excellent maneuverability compared to water surface cleaning vessels.

2. Remote Control Module
The waterborne waste cleanup robot is remotely controlled via a ground station using the AT9s remote controller, which sends signals received by the R9DS receiver on the robot for remote control. The AT9s operates at a frequency of 2.4GHz in the ISM band, with a remote control distance of 3400 meters, a maximum output stability of 1.84 microseconds, and a standard variation of 0.5 microseconds, providing high control precision. The R9DS 2.4G receiver employs DSSS and FHSS dual spread spectrum anti-interference technology, offering two signal modes: PWM and SBUS. The robot uses the PWM signal mode, outputting 9 standard PWM signals, facilitating the expansion of other special functions for the robot.


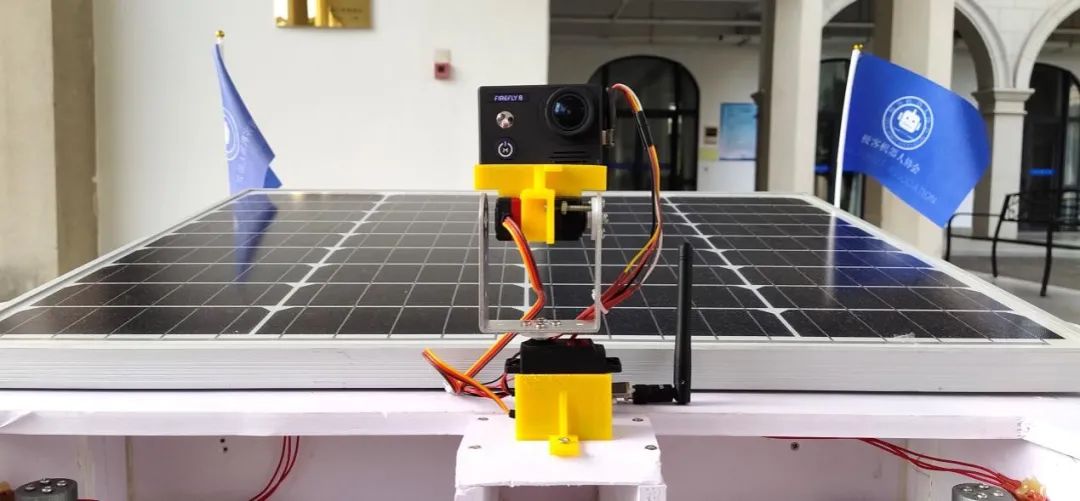
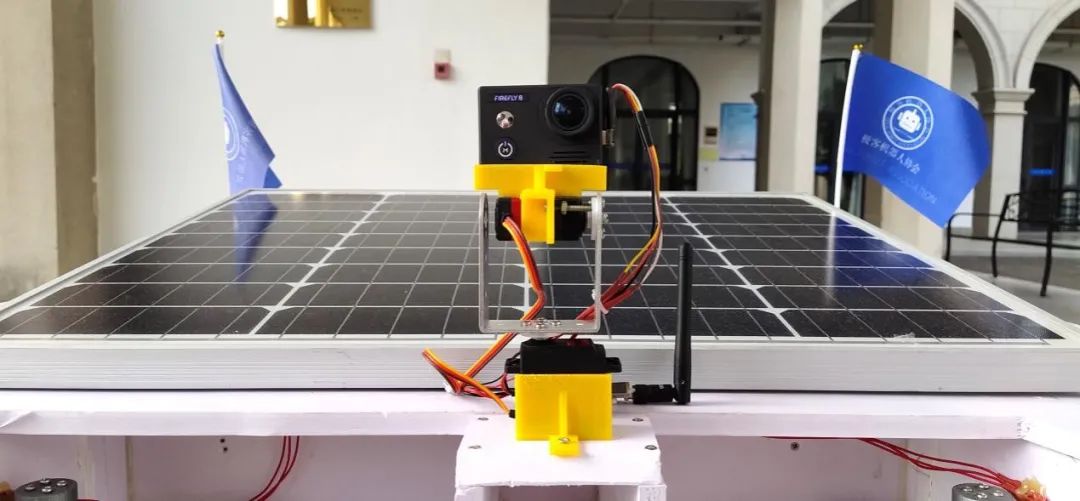
3. Image Transmission Module
The waterborne waste cleanup robot transmits real-time images of the cleanup operation through the image transmission module. This module consists of the TS832 image transmitter, a 4K action camera, and a receiving integrated display. The camera features a built-in 6-axis gyroscope stabilization, 12 million pixels, and can take remote photos or videos via the AT9s remote controller, ensuring stable and clear image capture during water operations. The TS832 image transmitter operates at a frequency of 5.8GHz with a transmission power of 600MW, transmitting images captured by the 4K action camera to the ground station’s integrated display, realizing the transmission of the cleanup operation’s visuals.


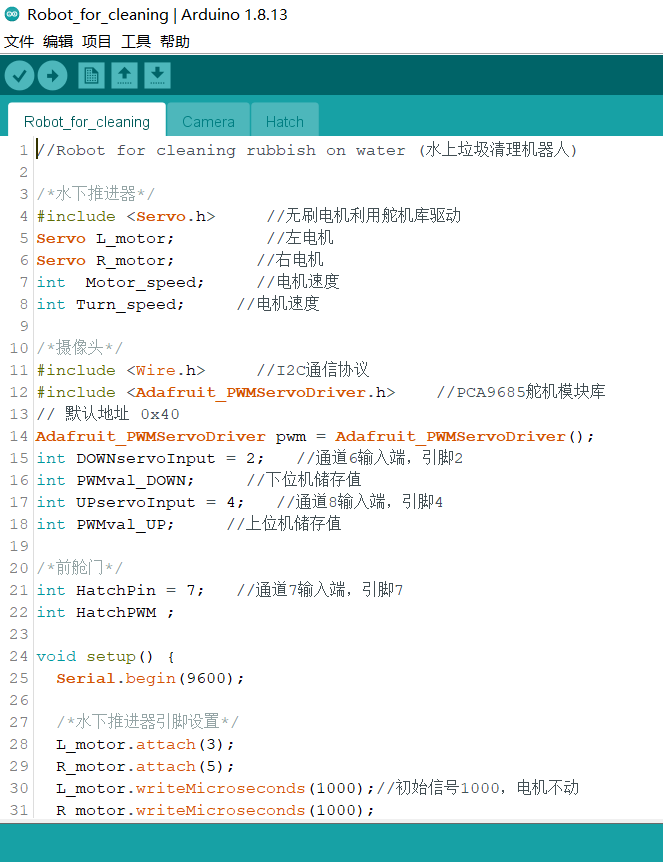
(5) Control System Software Design
Grain Rain
The control system of the waterborne waste cleanup robot is based on the Arduino UNO development board, which is based on the ATmega328P microcontroller. Programming is done via the Arduino IDE.


welcome to

Submitted by: Geek Robotics Association
