Application Environment:
SoMachine: V4.3
LMC058 FW: 4.0.3.6
LMC058 SW: 4.0.3.7
LXM28 FW: 1.6.2.0
LXM28 SW: 1.75.17
The homing function block in CANopen mode is as follows:
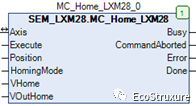
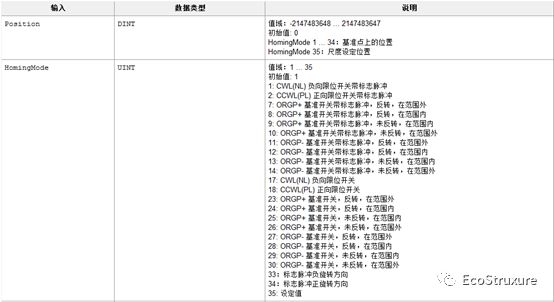
Detailed explanation of the homing mode (HomingMode) is as follows:
1: After the homing process starts, the motor runs towards the reverse limit (first speed segment). Upon reaching the reverse limit, the motor runs in the opposite direction, and after detecting the falling edge of the reverse limit, it runs until the motor Z phase stops (second speed segment). The current position is set to the Position value of the MC_Home_LXM28 function block (pulse count); if the motor encounters the forward limit during operation, it stops, and the servo drive displays AL015 alarm.
2: After the homing process starts, the motor runs towards the forward limit (first speed segment). Upon reaching the forward limit, the motor runs in the opposite direction, and after detecting the falling edge of the forward limit, it runs until the motor Z phase stops (second speed segment). The current position is set to the Position value of the MC_Home_LXM28 function block (pulse count); if the motor encounters the reverse limit during operation, it stops, and the servo drive displays AL014 alarm.
7: After the homing process starts, the motor runs towards the forward limit (first speed segment). Upon detecting the rising edge of the home signal, the motor runs in the opposite direction, and after detecting the falling edge of the home signal, it runs until the motor Z phase stops (second speed segment). The current position is set to the Position value of the MC_Home_LXM28 function block (pulse count); if the motor encounters the forward limit during operation, it runs in the opposite direction (first speed segment), detects the falling edge of the home signal, and runs until the motor Z phase stops (second speed segment). The current position is set to the Position value of the MC_Home_LXM28 function block (pulse count); if the motor encounters the reverse limit during operation, it stops, and the servo drive displays AL014 alarm.
8: After the homing process starts, the motor runs towards the forward limit (first speed segment). Upon detecting the rising edge of the home signal, the motor runs in the same direction until the motor Z phase stops (second speed segment). The current position is set to the Position value of the MC_Home_LXM28 function block (pulse count); if the motor encounters the forward limit during operation, it runs in the opposite direction, detects the falling edge of the home signal, and runs in the opposite direction (first speed segment), detects the rising edge of the home signal, and runs in the same direction until the motor Z phase stops (second speed segment). The current position is set to the Position value of the MC_Home_LXM28 function block (pulse count); if the motor encounters the reverse limit during operation, it stops, and the servo drive displays AL014 alarm.
9: After the homing process starts, the motor runs towards the forward limit (first speed segment). Upon detecting the rising edge of the home signal, the motor runs in the same direction, detects the falling edge of the home signal, and runs in the opposite direction (first speed segment). After detecting the rising edge of the home signal again, the motor runs in the same direction until the motor Z phase stops (second speed segment). The current position is set to the Position value of the MC_Home_LXM28 function block (pulse count); if the motor encounters the forward limit during operation, it runs in the opposite direction (first speed segment), detects the rising edge of the home signal, and runs until the motor Z phase stops (second speed segment). The current position is set to the Position value of the MC_Home_LXM28 function block (pulse count); if the motor encounters the reverse limit during operation, it stops, and the servo drive displays AL014 alarm.
10: After the homing process starts, the motor runs towards the forward limit (first speed segment). Upon detecting the rising edge of the home signal, the motor runs in the same direction, detects the falling edge of the home signal, and runs in the same direction until the motor Z phase stops (second speed segment). The current position is set to the Position value of the MC_Home_LXM28 function block (pulse count); if the motor encounters the forward limit during operation, it runs in the opposite direction (first speed segment), detects the rising edge of the home signal, runs in the opposite direction, detects the falling edge of the home signal, and runs in the same direction until the motor Z phase stops (second speed segment). The current position is set to the Position value of the MC_Home_LXM28 function block (pulse count); if the motor encounters the reverse limit during operation, it stops, and the servo drive displays AL014 alarm.
11: After the homing process starts, the motor runs towards the reverse limit (first speed segment). Upon detecting the rising edge of the home signal, the motor runs in the opposite direction, detects the falling edge of the home signal, and runs until the motor Z phase stops (second speed segment). The current position is set to the Position value of the MC_Home_LXM28 function block (pulse count); if the motor encounters the reverse limit during operation, it runs in the opposite direction (first speed segment), detects the rising edge of the home signal, runs in the same direction, detects the falling edge of the home signal, and runs until the motor Z phase stops (second speed segment). The current position is set to the Position value of the MC_Home_LXM28 function block (pulse count); if the motor encounters the forward limit during operation, it stops, and the servo drive displays AL015 alarm.
12: After the homing process starts, the motor runs towards the reverse limit (first speed segment). Upon detecting the rising edge of the home signal, the motor runs in the same direction until the motor Z phase stops (second speed segment). The current position is set to the Position value of the MC_Home_LXM28 function block (pulse count); if the motor encounters the reverse limit during operation, it runs in the opposite direction, detects the falling edge of the home signal, and runs in the opposite direction (second speed segment), detects the rising edge of the home signal, and runs in the same direction until the motor Z phase stops (second speed segment). The current position is set to the Position value of the MC_Home_LXM28 function block (pulse count); if the motor encounters the forward limit during operation, it stops, and the servo drive displays AL015 alarm.
13: After the homing process starts, the motor runs towards the reverse limit (first speed segment). Upon detecting the rising edge of the home signal, the motor runs in the opposite direction, detects the falling edge of the home signal, and runs until the motor Z phase stops (second speed segment). The current position is set to the Position value of the MC_Home_LXM28 function block (pulse count); if the motor encounters the reverse limit during operation, it runs in the opposite direction (first speed segment), detects the rising edge of the home signal, runs in the same direction, detects the falling edge of the home signal, and runs until the motor Z phase stops (second speed segment). The current position is set to the Position value of the MC_Home_LXM28 function block (pulse count); if the motor encounters the forward limit during operation, it stops, and the servo drive displays AL015 alarm.
14: After the homing process starts, the motor runs towards the reverse limit (first speed segment). Upon detecting the rising edge of the home signal, the motor runs in the same direction until the motor Z phase stops (second speed segment). The current position is set to the Position value of the MC_Home_LXM28 function block (pulse count); if the motor encounters the reverse limit during operation, it runs in the opposite direction (first speed segment), detects the rising edge of the home signal, runs in the opposite direction, detects the falling edge of the home signal, and runs in the same direction until the motor Z phase stops (second speed segment). The current position is set to the Position value of the MC_Home_LXM28 function block (pulse count); if the motor encounters the forward limit during operation, it stops, and the servo drive displays AL015 alarm.
17: After the homing process starts, the motor runs towards the reverse limit (first speed segment). Upon reaching the reverse limit, the motor runs in the opposite direction, and stops when detecting the falling edge of the reverse limit (second speed segment). The current position is set to the Position value of the MC_Home_LXM28 function block (pulse count); if the motor encounters the forward limit during operation, it stops, and the servo drive displays AL015 alarm.
18: After the homing process starts, the motor runs towards the forward limit (first speed segment). Upon reaching the forward limit, the motor runs in the opposite direction, and stops when detecting the falling edge of the forward limit (second speed segment). The current position is set to the Position value of the MC_Home_LXM28 function block (pulse count); if the motor encounters the reverse limit during operation, it stops, and the servo drive displays AL014 alarm.
23: After the homing process starts, the motor runs towards the forward limit (first speed segment). Upon detecting the rising edge of the home signal, the motor runs in the opposite direction, and stops when detecting the falling edge of the home signal (second speed segment). The current position is set to the Position value of the MC_Home_LXM28 function block (pulse count); if the motor encounters the forward limit during operation, it runs in the opposite direction (first speed segment), detects the rising edge of the home signal, runs in the same direction, and stops when detecting the falling edge of the home signal (second speed segment). The current position is set to the Position value of the MC_Home_LXM28 function block (pulse count); if the motor encounters the reverse limit during operation, it stops, and the servo drive displays AL014 alarm.
24: After the homing process starts, the motor runs towards the forward limit (first speed segment). Upon detecting the rising edge of the home signal, it stops, and the current position is set to the Position value of the MC_Home_LXM28 function block (pulse count); if the motor encounters the forward limit during operation, it runs in the opposite direction (first speed segment), detects the rising edge of the home signal, runs in the same direction, detects the falling edge of the home signal, and runs in the opposite direction (second speed segment). Upon detecting the rising edge of the home signal again, it stops, and the current position is set to the Position value of the MC_Home_LXM28 function block (pulse count); if the motor encounters the reverse limit during operation, it stops, and the servo drive displays AL014 alarm.
25: After the homing process starts, the motor runs towards the forward limit (first speed segment). Upon detecting the rising edge of the home signal, the motor runs in the same direction, detects the falling edge of the home signal, and runs in the opposite direction (second speed segment). Upon detecting the rising edge of the home signal again, it stops, and the current position is set to the Position value of the MC_Home_LXM28 function block (pulse count); if the motor encounters the forward limit during operation, it runs in the opposite direction (first speed segment), detects the falling edge of the forward limit, and runs in the same direction (second speed segment). Upon detecting the rising edge of the home signal, it stops (second speed segment), and the current position is set to the Position value of the MC_Home_LXM28 function block (pulse count); if the motor encounters the reverse limit during operation, it stops, and the servo drive displays AL014 alarm.
26: After the homing process starts, the motor runs towards the forward limit (first speed segment). Upon detecting the rising edge of the home signal, the motor runs in the same direction, detects the falling edge of the home signal, and stops (second speed segment). The current position is set to the Position value of the MC_Home_LXM28 function block (pulse count); if the motor encounters the forward limit during operation, it runs in the opposite direction (first speed segment), detects the rising edge of the home signal, runs in the opposite direction, detects the falling edge of the home signal, and stops (second speed segment). The current position is set to the Position value of the MC_Home_LXM28 function block (pulse count); if the motor encounters the reverse limit during operation, it stops, and the servo drive displays AL014 alarm.
27: After the homing process starts, the motor runs towards the reverse limit (first speed segment). Upon detecting the rising edge of the home signal, the motor runs in the opposite direction, detects the falling edge of the home signal, and stops (second speed segment). The current position is set to the Position value of the MC_Home_LXM28 function block (pulse count); if the motor encounters the reverse limit during operation, it runs in the opposite direction (first speed segment), detects the rising edge of the home signal, runs in the same direction, detects the falling edge of the home signal, and stops (second speed segment). The current position is set to the Position value of the MC_Home_LXM28 function block (pulse count); if the motor encounters the forward limit during operation, it stops, and the servo drive displays AL015 alarm.
28: After the homing process starts, the motor runs towards the reverse limit (first speed segment). Upon detecting the rising edge of the home signal, it stops, and the current position is set to the Position value of the MC_Home_LXM28 function block (pulse count); if the motor encounters the reverse limit during operation, it runs in the opposite direction (first speed segment), detects the rising edge of the home signal, runs in the same direction, detects the falling edge of the home signal, and stops (second speed segment). Upon detecting the rising edge of the home signal again, it stops (second speed segment), and the current position is set to the Position value of the MC_Home_LXM28 function block (pulse count); if the motor encounters the forward limit during operation, it stops, and the servo drive displays AL015 alarm.
29: After the homing process starts, the motor runs towards the reverse limit (first speed segment). Upon detecting the rising edge of the home signal, the motor runs in the same direction, detects the falling edge of the home signal, and runs in the opposite direction (second speed segment). Upon detecting the rising edge of the home signal again, it stops (second speed segment), and the current position is set to the Position value of the MC_Home_LXM28 function block (pulse count); if the motor encounters the reverse limit during operation, it runs in the opposite direction (first speed segment), detects the falling edge of the reverse limit, and runs in the same direction (second speed segment). Upon detecting the rising edge of the home signal, it stops (second speed segment), and the current position is set to the Position value of the MC_Home_LXM28 function block (pulse count); if the motor encounters the forward limit during operation, it stops, and the servo drive displays AL015 alarm.
30: After the homing process starts, the motor runs towards the reverse limit (first speed segment). Upon detecting the rising edge of the home signal, the motor runs in the same direction, detects the falling edge of the home signal, and stops (second speed segment). The current position is set to the Position value of the MC_Home_LXM28 function block (pulse count); if the motor encounters the reverse limit during operation, it runs in the opposite direction (first speed segment), detects the rising edge of the home signal, runs in the opposite direction, detects the falling edge of the home signal, and stops (second speed segment). The current position is set to the Position value of the MC_Home_LXM28 function block (pulse count); if the motor encounters the forward limit during operation, it stops, and the servo drive displays AL015 alarm.
33: After the homing process starts, the motor runs towards the reverse limit until the motor Z phase stops (second speed segment). The current position is set to the Position value of the MC_Home_LXM28 function block (pulse count), and it can be repeated; if the motor encounters the forward limit during operation, it stops, and the servo drive displays AL015 alarm; if the motor encounters the reverse limit during operation, it stops, and the servo drive displays AL014 alarm.
34: After the homing process starts, the motor runs towards the forward limit until the motor Z phase stops (second speed segment). The current position is set to the Position value of the MC_Home_LXM28 function block (pulse count), and it can be repeated; if the motor encounters the forward limit during operation, it stops, and the servo drive displays AL015 alarm; if the motor encounters the reverse limit during operation, it stops, and the servo drive displays AL014 alarm.
35: After the homing process starts, set the Position value (pulse count) of the MC_Home_LXM28 function block to the current position.
Forward limit: P2-1x parameter: 16#0x23; Alarm displayed by the drive: AL015
Reverse limit: P2-1x parameter: 16#0x22; Alarm displayed by the drive: AL014
In the above homing modes, if limit and home signals are used, they must be set through DI points; otherwise, the error code of the function block when executing is 75.
Long press to recognize the QR code, follow the EcoStruxure public account, and let’s learn together!
