Receive the latest tweets!
How to integrate embedded systems?
A standard industrial camera is obviously too large, too expensive, and consumes too much power. A board-level camera is a good choice, as this module retains the necessary parts for the application. For example, this module removes the packaging box because it can be directly integrated into the system you designed, saving space, cost, and power consumption.
If your system requires a small size
We can use an embedded processing platform, such as SoC. SoC is the core electronic component of a computer, integrating a GPU to perform vision tasks, while also integrating a CPU, internal bus, interfaces, etc., all on one chip. Although the performance of SoC is not as good as that of a PC processor, it can already meet many application scenarios.
If your system requires low cost
To ensure low-cost design, SoC is directly soldered onto the PCB.
How does the camera module connect to the main processing board?
A major feature of embedded vision is its versatility. Optical devices, image sensors, and interfaces have various options to suit many applications. Today, we will address one of the most critical choices you must make when building an embedded vision system: choosing the right interface.
Camera modules have different interfaces, commonly using USB 2.0, USB 3.0, serial or parallel interfaces, and MIPI CSI-2, each with its own advantages and disadvantages. Below we will detail the pros and cons of each. Each standard comes with its price and performance trade-offs. Here are a few commonly used interfaces.
Choosing interfaces for embedded vision
MIPI CSI-2
MIPI CSI-2 (Mobile Industry Processor Interface) is the most widely used embedded vision interface. It was originally designed for mobile devices, and the MIPI camera working group updates it every two years. Other applications using it include head-mounted VR devices, IoT devices, and 3D facial recognition security systems. This is a proven technology that will continue to exist.
MIPI has four image data channels, each capable of reaching 1.5 Gb/s, totaling up to 6 Gb/s of high bandwidth, making it faster than USB 3.0. It is an efficient and reliable protocol that can handle 1080p video and can be used for 8K and above. Its low overhead provides higher net image bandwidth.
The third-generation technology, CSI-3, has now been developed.
CSI-2 can achieve low-power, high-performance applications, making it the best choice for our automated lawn mower.
USB 2.0 is generally supported in SoC, meaning only a small amount of hardware requires a USB adapter. The downside is its low bandwidth of only 40MB/s, which is inadequate for high-speed, high-resolution scenarios.
USB 3.0
USB is currently the runner-up. USB 3.0 upgrades the very common USB interface to 5 Gb/s. Because USB is plug-and-play, embedded vision devices with this interface can usually be replaced instantly, making it easy to replace damaged devices.
Choosing USB 3.0 can save you expensive and lengthy development time (and cost) for embedded vision interfaces. However, deploying USB 3.0 in tight spaces can be challenging. USB connectors are quite large, and the standard rigid wiring may not be ideal for some more compact embedded vision components.
Both USB 2.0 and USB 3.0 have one thing in common: they require a large connector and inflexible cables, which may limit application scenarios. Moreover, only a few SoCs support USB 3.0.
Parallel interfaces allow the camera module to communicate with the mainboard through baseband lines. This type of module requires an SoC with parallel video input (which is rare), and its maximum line length support is 50cm.
Serial interfaces are used to connect with FPGA. If the core of the embedded system is already an FPGA, then a serial interface should be chosen. This type of camera module also communicates with the FPGA through baseband lines, with some modules supporting up to 1m. Both parallel and serial interfaces require the camera driver to be installed in the SoC.
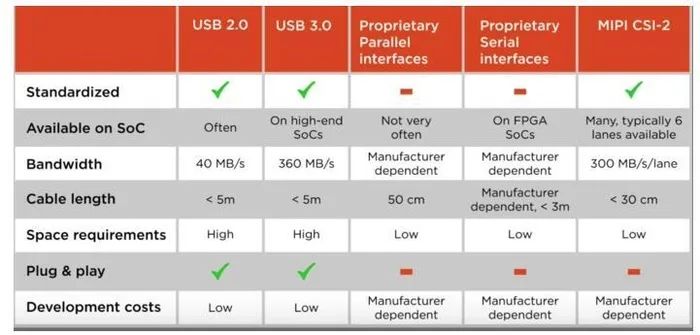
The interface comparison is as follows:
Recommended Popular Articles:Clickto directly access related articles:
001: Research resources and journal/conference introductions in the field of computer vision
002:German KUKA robot versus world champion table tennis
003:120 images outline the complete picture of the global AI industry!
004: Facebook open-sourcing computer vision systems, understanding images at the pixel level (with papers and code)
005: Want to become a machine learning engineer? This self-study guide is worth keeping
006: Eleven common filtering algorithms
007: Basics of image processing and computer vision, classics, and recent developments
008: In-depth report on the robotics industry (full version)
009: From laundry maid to Google’s chief scientist, she changed the AI world with loneliness!
010:Industrial-grade machine vision industry research report
011:Brief description of the principle of dual telecentric industrial lenses
012: How to equip an academic iPad?
013: Overview of machine vision systems
014: German craftsmanship: We do not have “good quality at low prices”
015: Why are the best robotic arms 7 degrees of freedom instead of 6?
016: The most powerful technical video in history!
017: Comparison of the top 10 popular programming languages for robots, which one do you master?
018: Novel and complex mechanical principle diagrams!
019: A comprehensive collection of knowledge related to robot control systems 020: The working principle of robots, the most detailed analysis in history!
021: Knowledge points for selecting light sources 022: This is a mechanical hand, this is automation, what is yours?023: Basic knowledge of cameras and lenses024: Overview of the IoT industry chain (with another 13 major electronic industry panoramic maps, must collect) 025: How strong is Japan? Breath-taking! Could not sleep all night after watching 026: German machinery amazes the world: how lonely is invincibility?
 Welcometo forward, leave messages, like, share, thank you for your support!
Welcometo forward, leave messages, like, share, thank you for your support!