

Moreover, the tutorial includes a nearly one-hour assembly video, which is a great hands-on project for those interested in Raspberry Pi and Python programming.
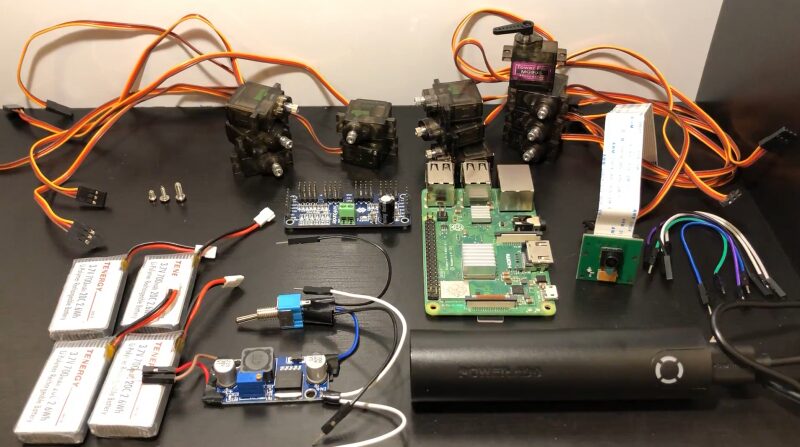
Component List
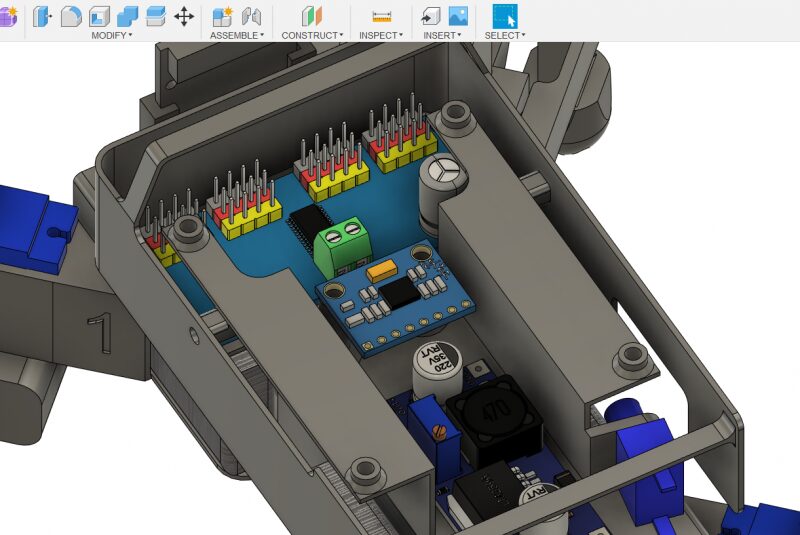
Raspberry Pi 3B+/4B × 1, 15MP OV5647 Pi Camera Module × 1, POWERADD 5000mAh Power Bank × 1, PCA9685 16 Channel 12-bit PWM Servo Driver × 1, LM2596 DC-DC Buck Converter Module × 1, MG90S Servo Motor × 1, 3.7V Lithium Battery (700mAh) × 4, Toggle Switch × 1, Jumper Wires × Several, M3 Nuts and Bolts × Several
3D Printed Components
List of parts to be printed: 1 x Body, 1 x Joint 1, 1 x Joint 2, 1 x Joint 3, 1 x Joint 4, 1 x Thigh 1, 1 x Thigh 2, 1 x Thigh 3, 1 x Thigh 4, 1 x Calf 1, 1 x Calf 2, 1 x Calf 3, 1 x Calf 4, 1 x Raspberry Pi Camera Mount, 1 x Top Cover, 4 x Foot Tips (adhesive), 4 x Foot Tips (smooth)
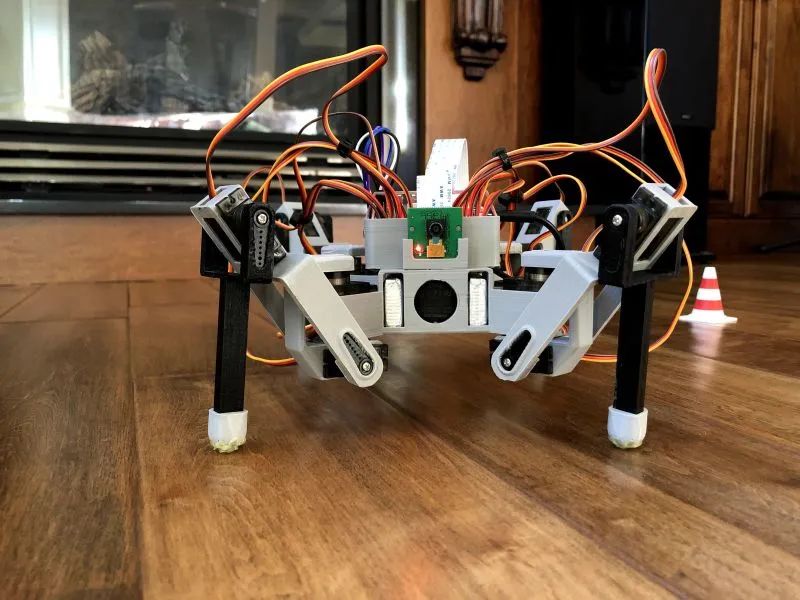
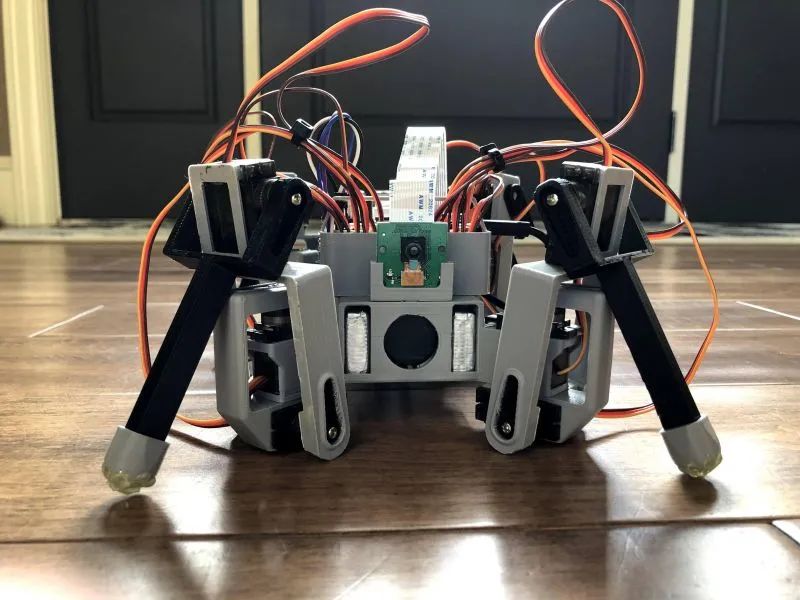
Each leg consists of three parts: joint, thigh, and calf. For easy assembly, the STL files are named and numbered. They can be downloaded from the project repository: https://make.quwj.com/project/349
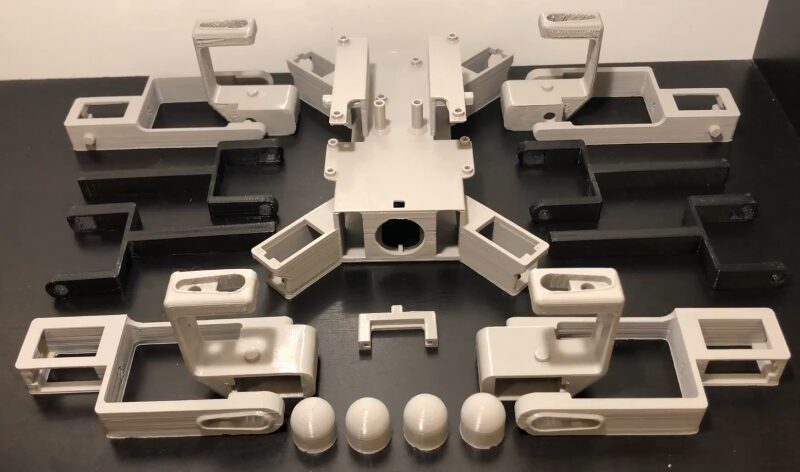
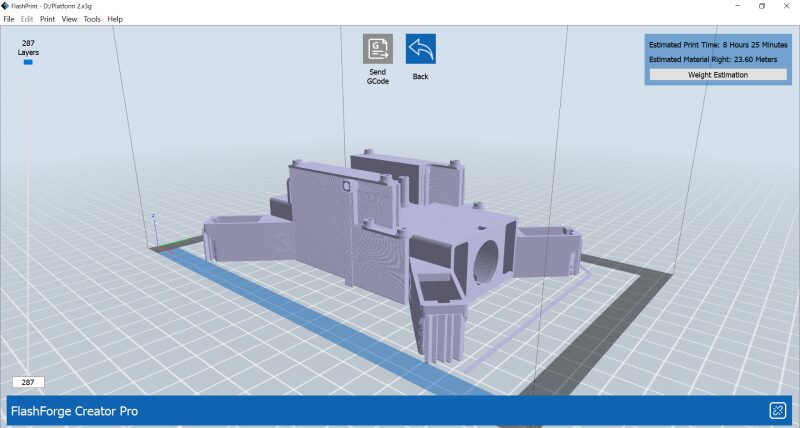
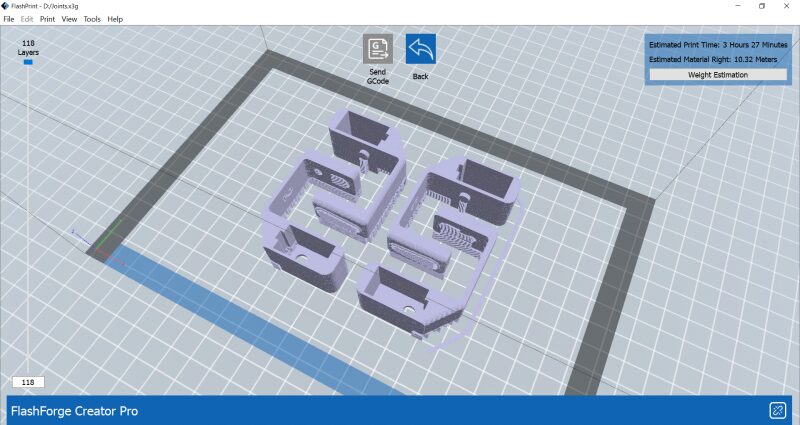
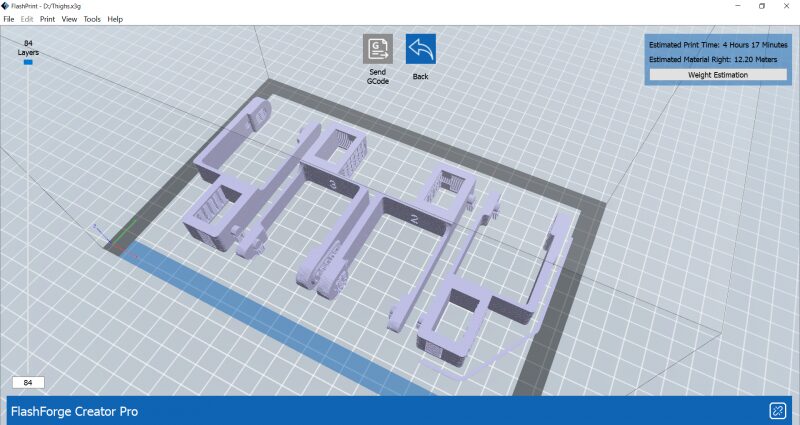
Use PLA material to 3D print all files. You can print all joint parts at once, and thighs and calves can also be printed together, as shown. However, the body, joints, thighs, and camera mount need supports during printing.
Installing Raspberry Pi
It is recommended to use a Raspberry Pi with at least 2GB of RAM + Raspberry Pi OS Desktop version. Set up the Raspberry Pi system, refer to: https://shumeipai.nxez.com/2019/04/17/write-pi-sd-card-image-using-etcher-on-windows-linux-mac.html
Connect the Raspberry Pi to the network via WiFi, refer to: https://shumeipai.nxez.com/2017/09/13/raspberry-pi-network-configuration-before-boot.html
Enable SSH and use PuTTY to log in to the Raspberry Pi terminal. File transfer and movie streaming can be done via SFTP using FileZilla.
Enable VNC and use VNC Viewer to log in to the Raspberry Pi, refer to: https://shumeipai.nxez.com/2018/08/31/raspberry-pi-vnc-viewer-configuration-tutorial.html
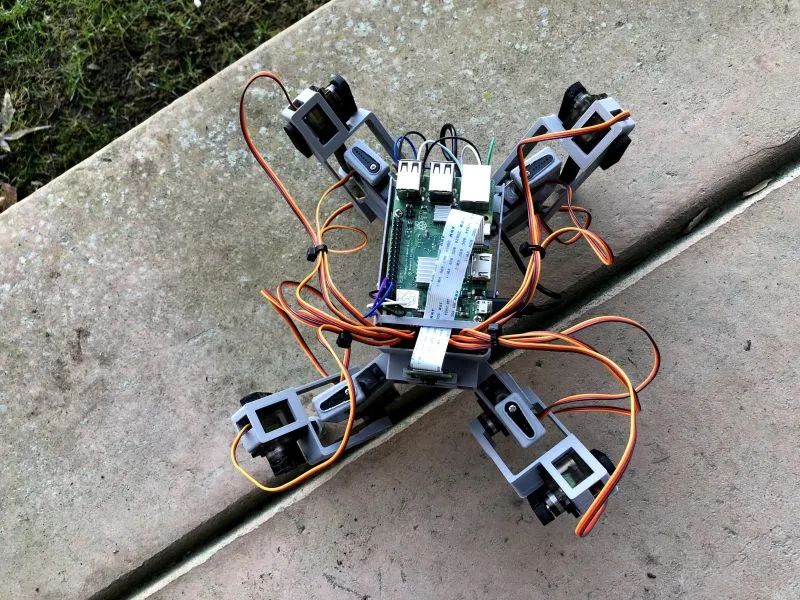
Assembling the Robot
Watch the complete assembly video (51 minutes long, please switch to WiFi to watch).
Special Notes: 1. Some parts may need to be sanded for assembly. You do not have to follow the steps in the video exactly, but it is recommended to test the circuit first before assembling the 3D parts.
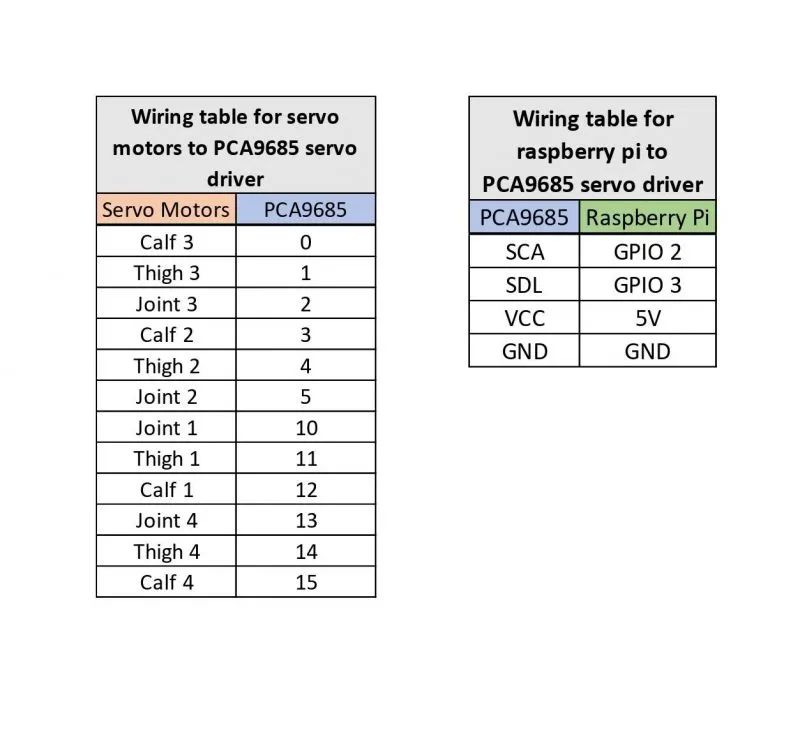
2. Wiring diagrams for each servo motor are provided below the table.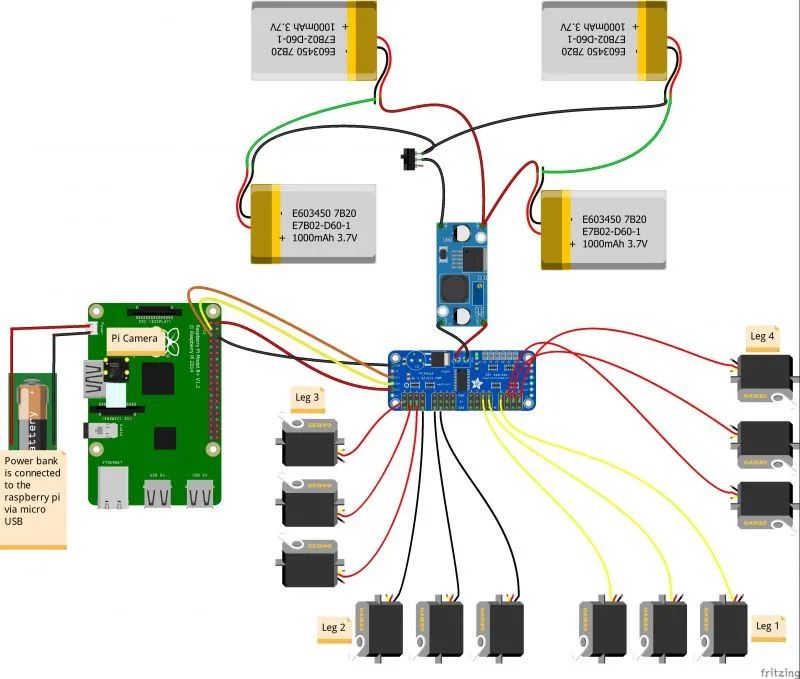
3. If you are interested in connecting a 4-cell lithium battery, here is an explanation. This is a set of two 3.7V lithium batteries connected in series to form a 7.4V battery pack. By paralleling another identical set, with each lithium battery being 700mAh, it ultimately forms a 7.4V 1400mAh battery pack. Series connection increases voltage, while parallel connection expands capacity. The robot has two power supplies: the lithium battery pack powers the servo motors, while the power bank independently powers the Raspberry Pi.
Below are the software and commands used: WinSCP: https://winscp.net/eng/download.php, Adafruit_Python_PCA9685 module:
sudo pip3 install adafruit-pca9685Pygame module:
sudo pip3 install pygameThe program source files can be downloaded from the project repository: https://make.quwj.com/project/349
Completion
By following the reference video, you can complete the assembly. I hope you can learn something and have fun!

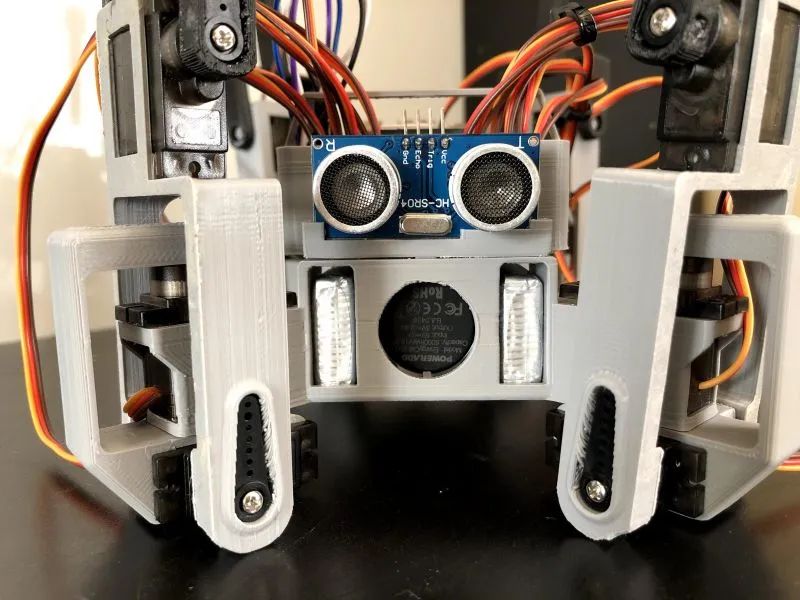
You can make some interesting extensions and upgrades on this robot platform. For example, adding an HC-SR04 ultrasonic sensor, for which STL files are already provided in the project repository. With programming, you can enable the robot to walk autonomously and avoid obstacles.
By adding an MPU-6050 sensor, you can also enable the robot to achieve self-balancing. Introducing OpenCV will give the robot computer vision capabilities…
Let your imagination run wild!
Project repository address:
http://make.quwj.com/project/349
via instructables.com/id/3D-Printed-Raspberry-Pi-Spider-Robot-Platform/
This article is reprinted from Robot Network
More exciting content

Join the community
The Robot Lecture Hall Rob Community is recruiting! If you are engaged in or want to engage in the robotics industry, or want to learn in this direction, you are welcome to join us to discuss cutting-edge robot technology.
Additionally, legged robots, medical robots, industrial robots,special robots, etc. professional discussion groups are recruiting, and we welcome friends from various professional fields to join.
Reply “Group Chat” in the Robot Lecture Hall WeChat public account to get group joining methods!
Recruiting Authors
The Robot Lecture Hall is recruiting part-time content creators and column writers
Please send your resume and original works to the email: [email protected]
We have no requirements for profession, location, etc., and welcome interested and capable friends to join!

Are you tired? Click “Looking” to support us!