In embedded system development, driver design is a key factor affecting system performance, energy efficiency, and maintainability. Below is an in-depth analysis of three mainstream driver design techniques along with practical recommendations:
1. Polling Driver
Technical Features:
-
Blocking Design: The main program cannot perform other tasks while waiting for peripheral responses.
-
Simple Implementation: Only requires looping to check the status register flags.
-
Low Resource Overhead: No need to configure interrupt controllers or DMA channels.
Typical Application Scenarios:
-
High-speed peripherals (e.g., GPIO state detection)
-
Initialization phase or single operations
-
Simple devices with very low real-time requirements
Blocking Design:
// Blocking polling example
bool Adc_GetResultsBlocking(uint32_t AdcResults) {
Adc_Start();
while(ADC_COMPLETE_FLAG == FALSE);
AdcResults = Adc_ReadAll();
return AdcResults;
}Optimization Strategies:
// Non-blocking polling example
bool Adc_GetResultsNonBlocking(AdcResults_t* results) {
if(ADC_COMPLETE_FLAG) {
*results = Adc_ReadAll();
return true;
}
return false;
}Advantages: Allows the main program to perform other tasks while waiting.Challenges: Requires a well-designed polling interval to avoid wasting CPU resources.
2. Interrupt-Driven
Core Mechanism:
-
Event-triggered (e.g., UART reception complete)
-
Timed scheduling (e.g., ADC periodic sampling)
Key Implementation Points:
-
Interrupt Service Routine (ISR) Optimization:
// UART receive interrupt example
volatile uint8_t uart_rx_buffer[256];
volatile uint16_t uart_rx_index = 0;
void UART0_IRQHandler(void) {
if(UART0->ISR & RXNE_FLAG) {
uint8_t data = UART0->RDR;
if(uart_rx_index < sizeof(uart_rx_buffer)) {
uart_rx_buffer[uart_rx_index++] = data;
}
// Trigger application layer processing event
event_flag |= UART_RX_EVENT;
}
}2. Interrupt priority management (based on NVIC controller)
3. Critical section protection (disable interrupts)
Design Best Practices:
-
Keep ISR execution time under <10μs
-
Use double buffering to avoid data contention
-
Communicate with the main program through event flags
-
Prefer a composite mode of DMA transfer and interrupts
3. DMA-Driven
Architectural Advantages:
-
Zero-copy data transfer
-
Hardware-level concurrency control
-
Batch processing capability
Typical Configuration Process:
void ConfigureDmaForAdc(void) {
// 1. Configure DMA channel
DMA1_Channel1->CCR = DMA_CCR_MINC // Memory address increment
| DMA_CCR_TCIE // Transfer complete interrupt
| DMA_CCR_DIR_M2P; // Memory to peripheral
// 2. Set transfer parameters
DMA1_Channel1->CNDTR = ADC_BUFFER_SIZE;
DMA1_Channel1->CPAR = (uint32_t)&(ADC1->DR);
DMA1_Channel1->CMAR = (uint32_t)adc_buffer;
// 3. Enable DMA interrupt
NVIC_EnableIRQ(DMA1_Channel1_IRQn);
NVIC_SetPriority(DMA1_Channel1_IRQn, 0);
// 4. Start transfer
DMA1_Channel1->CCR |= DMA_CCR_EN;
}Hybrid Mode Design: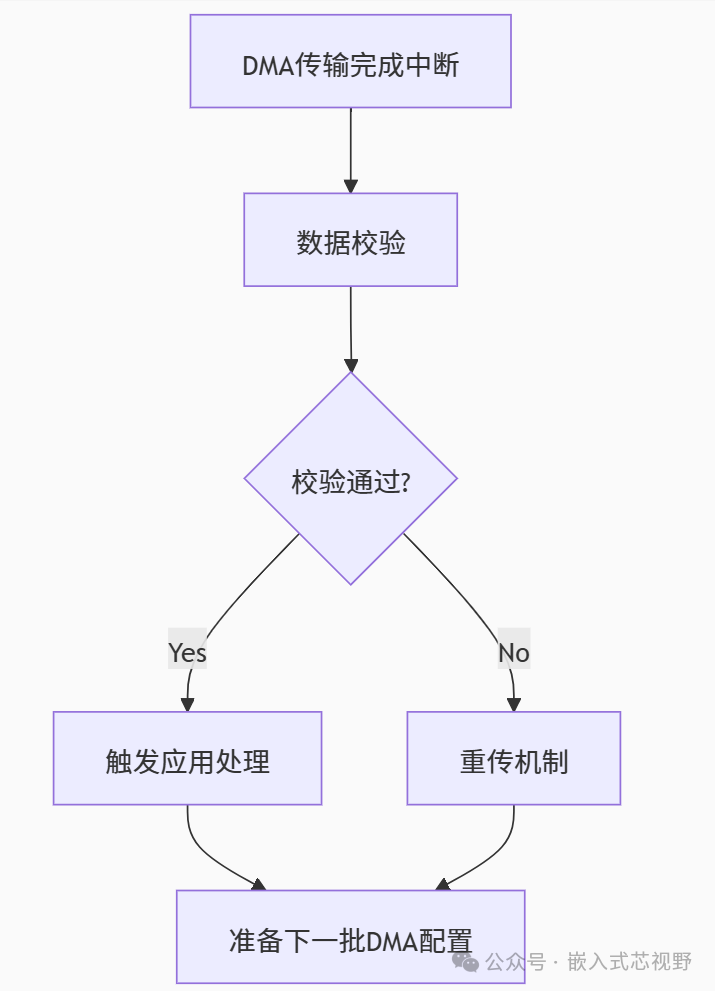
Technical Selection Matrix
| Evaluation Dimension | Polling Driver | Interrupt-Driven | DMA-Driven |
|---|---|---|---|
| CPU Utilization | High (continuous utilization) | Medium (event-triggered) | Low (hardware autonomy) |
| Real-time Performance | Poor determinism | Microsecond-level response | Depends on transfer block size |
| Data Throughput | <1 Mbps | <10 Mbps | >100 Mbps |
| Implementation Complexity | ★☆☆☆☆ | ★★★☆☆ | ★★★★☆ |
| Power Consumption | Poor (continuous wake-up) | Good (fast sleep) | Excellent (deep sleep) |
| Typical Applications | GPIO state detection | UART message reception | SD card data storage |
Debugging and Optimization Techniques
-
Interrupt Storm Protection:
-
Add a watchdog timer
-
Implement interrupt frequency monitoring
volatile uint32_t isr_counter = 0;
void TIM2_IRQHandler(void) {
if(++isr_counter > MAX_ISR_RATE) {
SystemReset();
}
// ...other processing...
}2. DMA Transfer Diagnosis:
-
Use Memory Protection Unit (MPU) to detect out-of-bounds access
-
Configure DMA transfer complete/half transfer interrupts for double buffering
3.Power Optimization:
void EnterLowPowerMode(void) {
// Disable clock for unused peripherals
RCC->AHB1ENR &= ~(UNUSED_PERIPH_CLOCKS);
// Configure standby mode
PWR->CR |= PWR_CR_CWUF;
SCB->SCR |= SCB_SCR_SLEEPDEEP_Msk;
__WFI();
}Advanced Design Patterns
-
Producer-Consumer Model:
-
Interrupt/DMA as data producers
-
Application threads consume data via message queues
State Machine Driven:
typedef enum {
DRV_STATE_IDLE,
DRV_STATE_TX_PENDING,
DRV_STATE_RX_ACTIVE} DrvState_t;
void UartStateMachine(uint8_t event) {
static DrvState_t state = DRV_STATE_IDLE;
switch(state) {
case DRV_STATE_IDLE:
if(event == TX_REQUEST) {
StartDmaTransfer();
state = DRV_STATE_TX_PENDING;
}
break;
// ...other state transitions...
}
}3. Hardware Abstraction Layer (HAL) Design:
typedef struct {
void (*Init)(void);
bool (*Transmit)(uint8_t* data, uint16_t len);
bool (*Receive)(uint8_t* buffer, uint16_t len);
} DeviceDriver_t;
const DeviceDriver_t UartDriver = {
.Init = Uart_Initialize,
.Transmit = Uart_TransmitDma,
.Receive = Uart_ReceiveInterrupt};In actual project development, it is recommended to adopt a layered design strategy:
-
Encapsulate low-level hardware operations as atomic functions
-
Implement protocol parsing and state management in the middle layer
-
The application layer accesses driver services through standardized interfaces
By reasonably selecting driver modes and optimizing implementations, system performance can be improved by 3-5 times while reducing power consumption by over 60%. For critical task systems, a hybrid driver architecture is recommended: use DMA + interrupts for time-sensitive operations and periodic polling for state monitoring, achieving the best balance between performance and reliability.
Follow me for more technical insights.