Efficient Training Strategies for Embodied Reasoning in Robotics
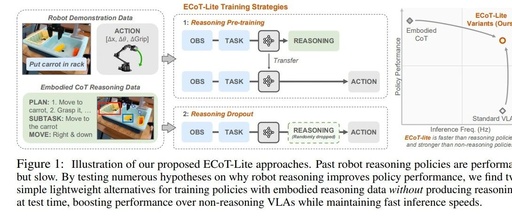
Training Strategies for Efficient Embodied Reasoning https://arxiv.org/abs/2505.08243 The ability of robotic policies to generalize is crucial for their application in various scenarios. Currently, the training of robotic policies often relies on a large amount of robotic experience data, which is typically collected through manual remote control, leading to high costs and low efficiency. VLA enhances … Read more