Breaking Through the Challenges of Humanoid Robots! Stanford Releases a Learnable Compliant Control Framework Based on Reference Dynamics | GentleHumanoid Upper Limb Six-Point Coordination + Controllable Force Response!
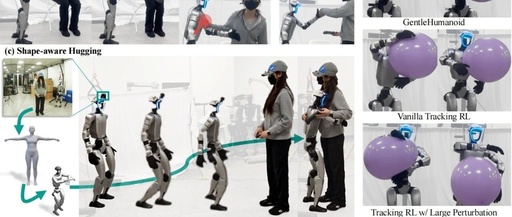
Click to join the discussion group→👥 Discuss with 1000+ embodied intelligence researchersEntrepreneurship × RL × VLA Open Source Project Collection: Yushu | VLA | Reinforcement Learning Control | RL Framework Practice | Unitree RL_Gym Core Ideas and Innovations 💬 Editor’s Perspective GentleHumanoid allows the robot’s upper body to be compliant, enabling it to move along … Read more