
1. Introduction
2. Current Research Status of Underwater Wireless Sensor Networks
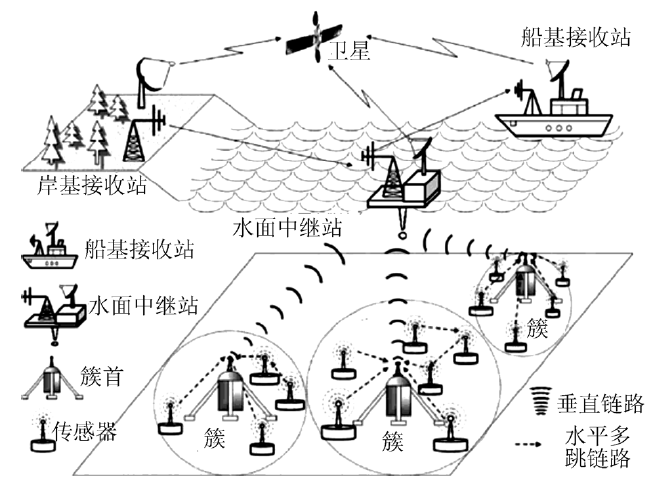
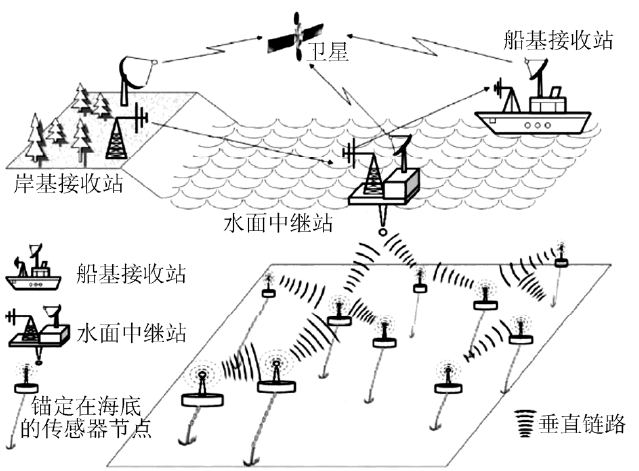
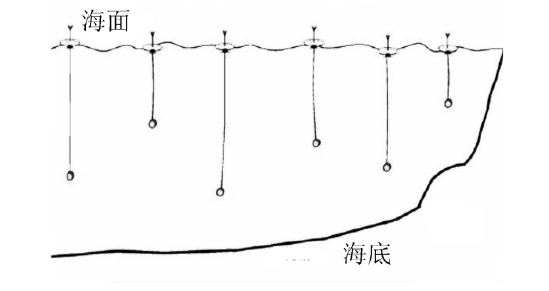
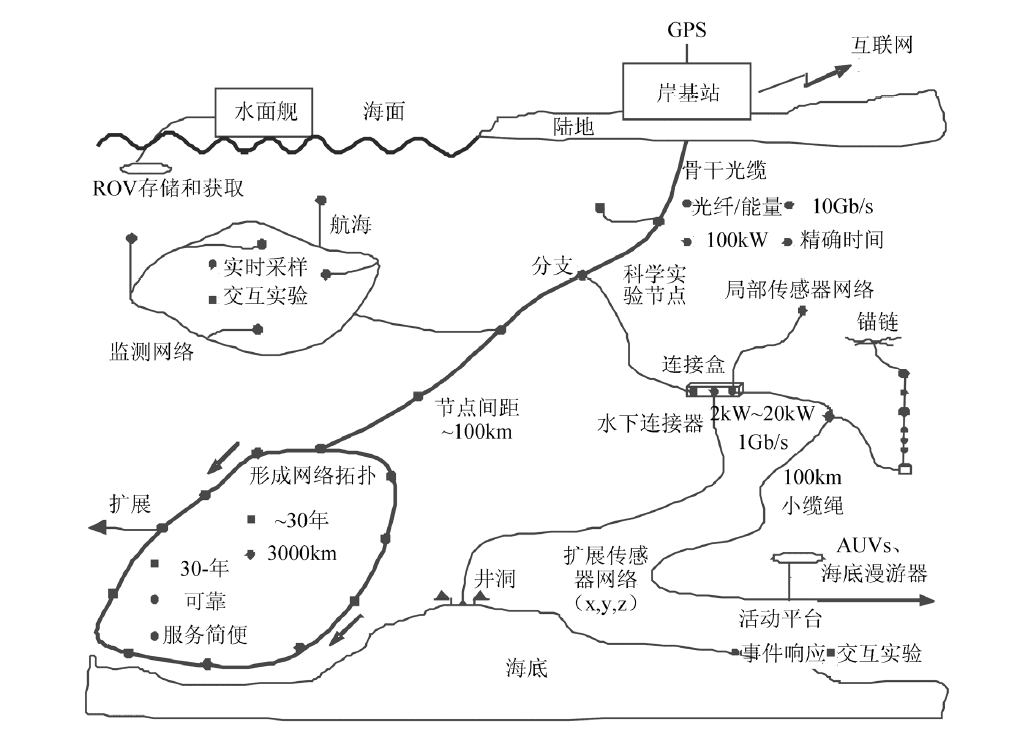
3. Basic Structure and Characteristics of Underwater Sensor Networks
4. Challenges Faced in Research
5. Conclusion




1. Introduction
2. Current Research Status of Underwater Wireless Sensor Networks
3. Basic Structure and Characteristics of Underwater Sensor Networks
4. Challenges Faced in Research
5. Conclusion